
Team Collaborative Workflow and Modular System Development
Group C: Onur Dogrultucu, Priyam Ravinder, Sam Holcombe
__________________________________________________________________
The workshop comprised of learning about the varying aspects of collaborative and professional workflows used within robotics development
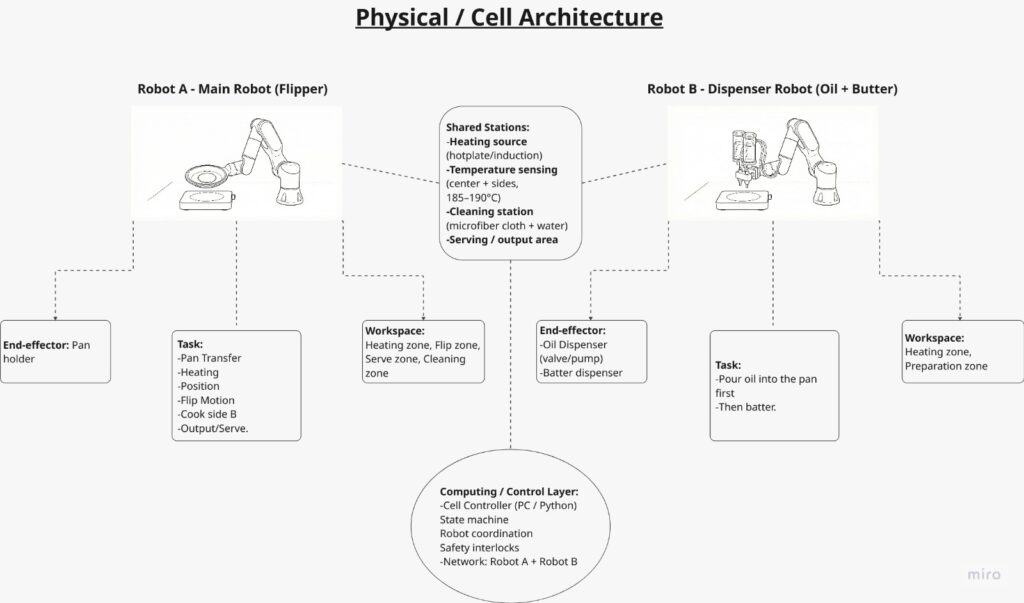
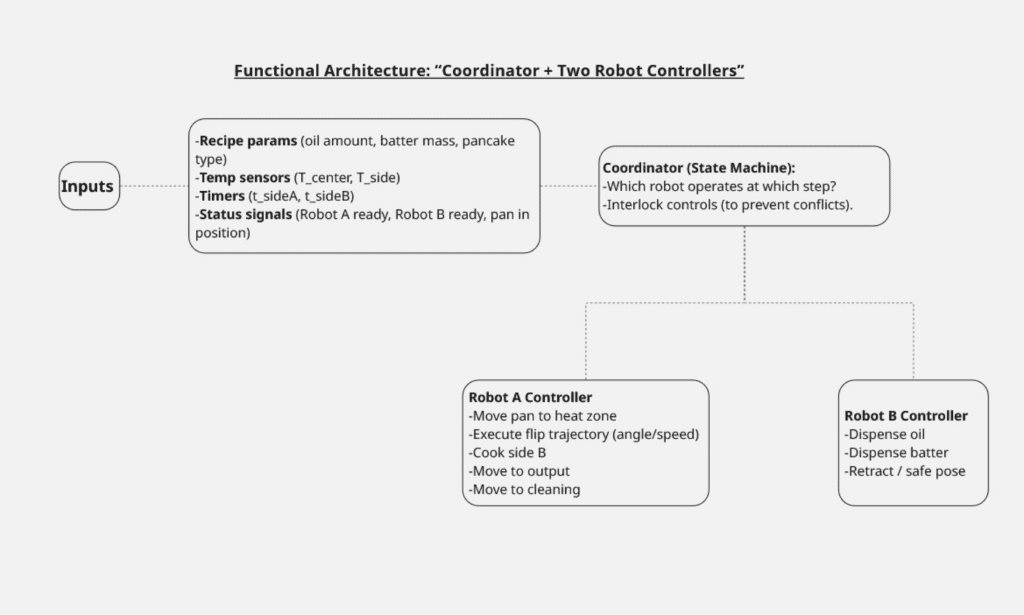
System Architecture
Github Workflow & WSL Basic
IDEs, Docker & Advanced Python
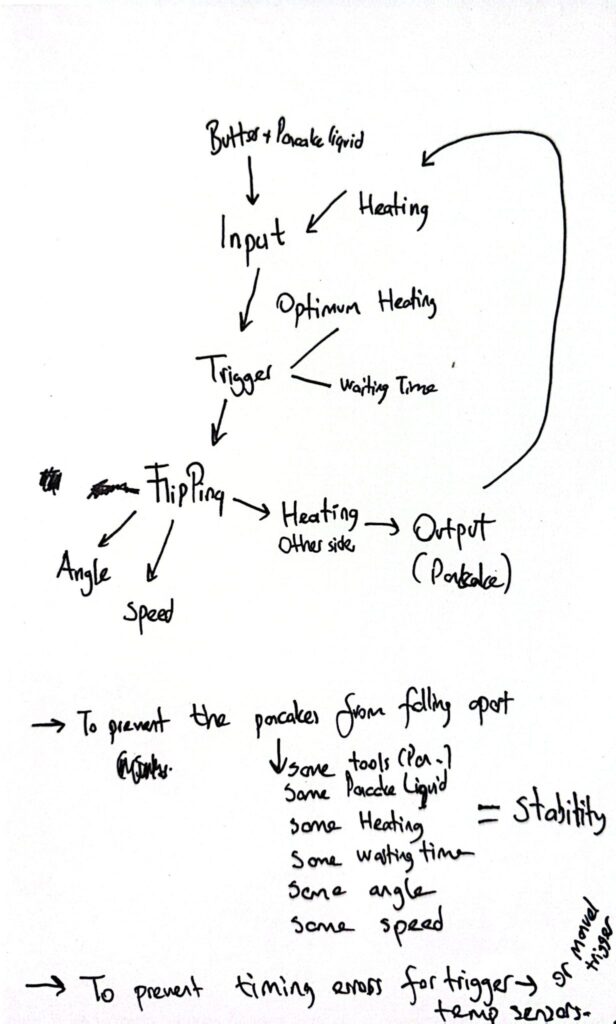
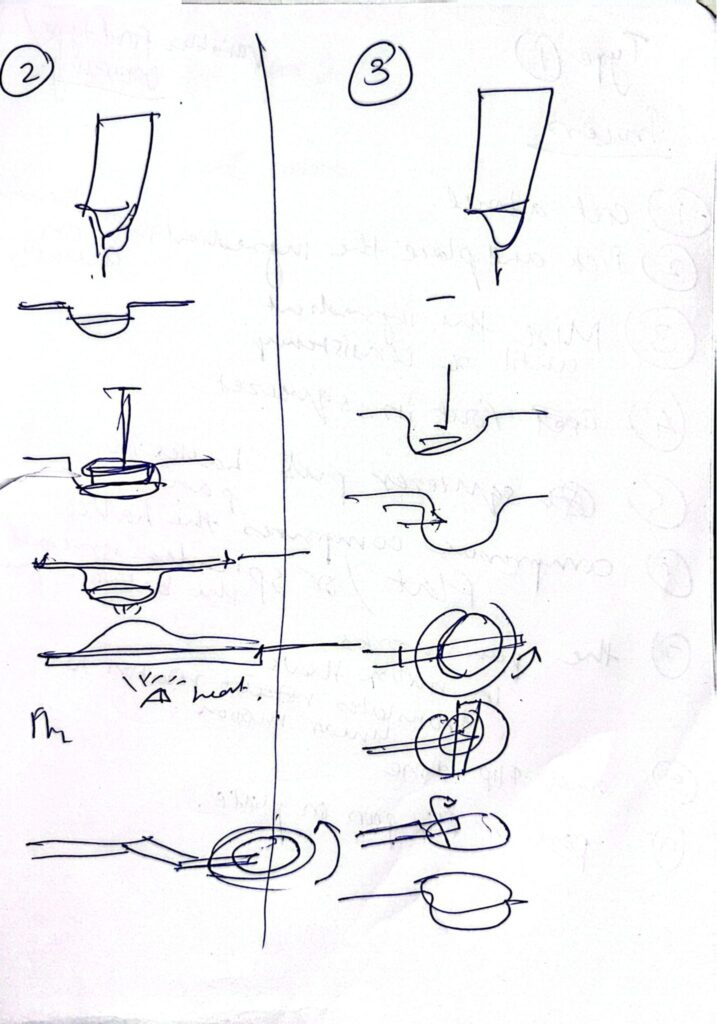
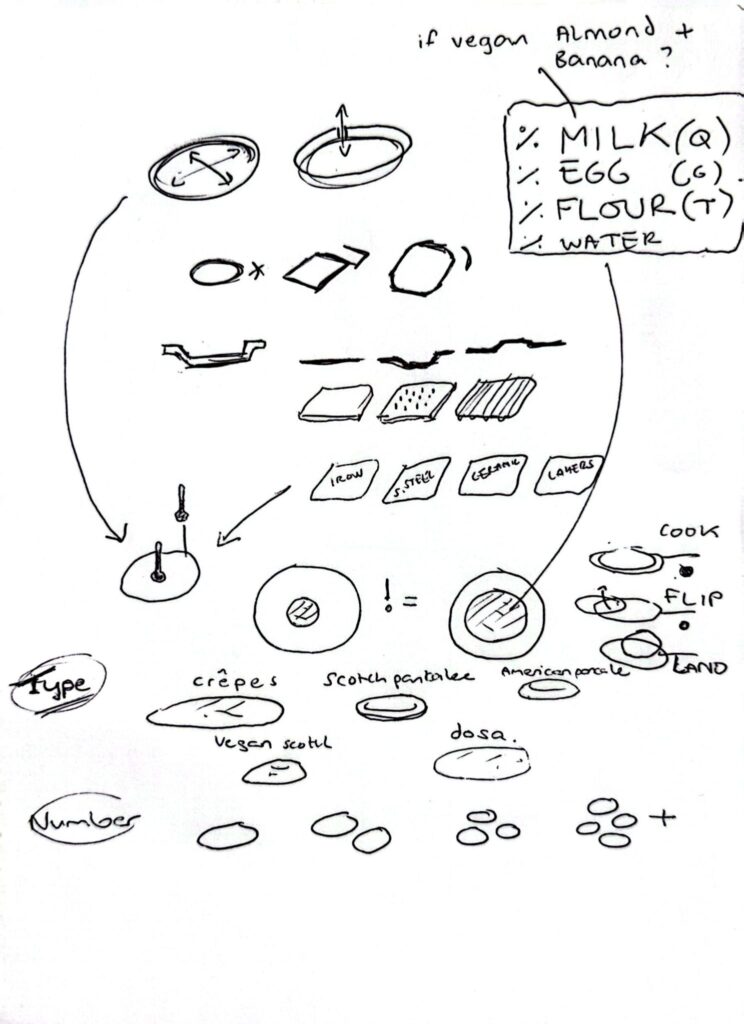
The first day of the project was centered around the study of Systems Engineering. Our group looked at how we would approach the idea of flipping a pancake with a robot from a purely conceptual point of view. Our initial conversations were about the act of flipping itself. Would this be: 1) Flipping the pancake through the air using the motion of the robots arm on the cooking surface 2) Flipping the pancake by covering the cooking surface with another surface and rotating the robot arm 3) Flipping the pancake by rotating it around a utensil whilst the cooking surface stayed in the same location.
We split this task into a matrix of 3×3 between our group. By asking these questions individually and then reviewing together as a group, we could see where our thinking overlapped as to the importance. This in turn addressed one of the first steps in a system engineering flowchart as to the ‘baselines’ of the project.
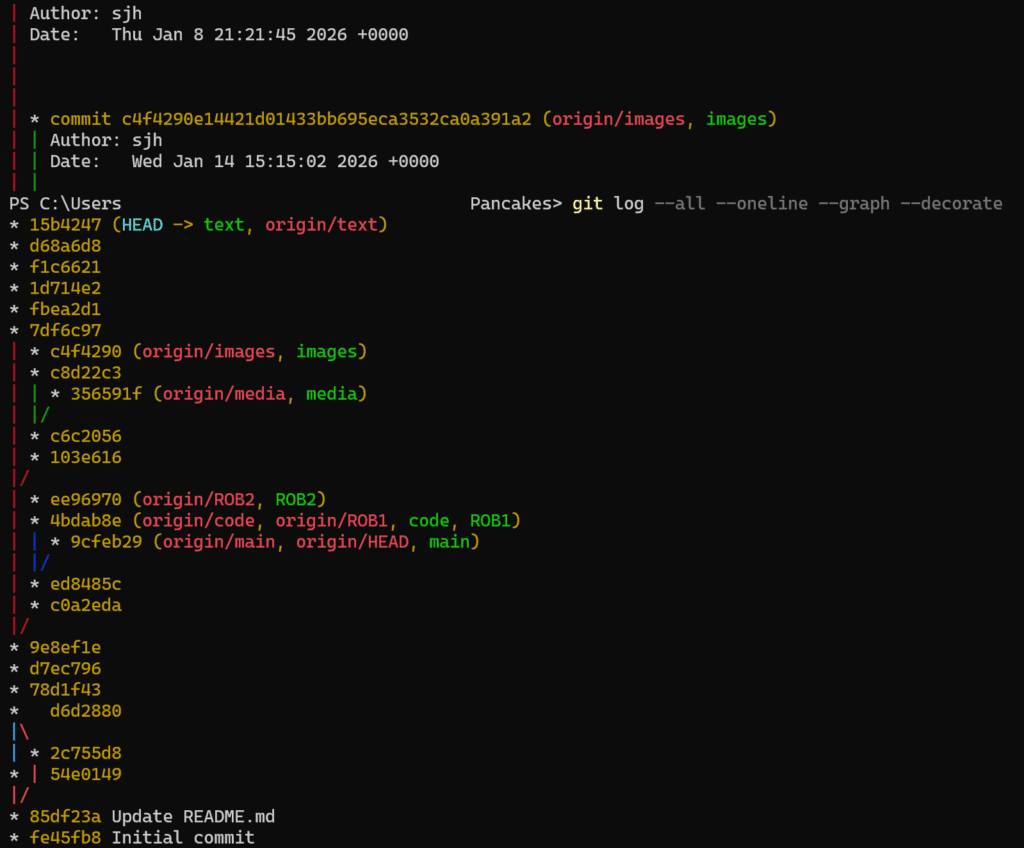
Over the next few days we used the project of pancake flipping as an wireframe for learning aspects within Github; setting up a repository for mantaining the pseudo scripts produced for a pancake flipping robot:
https://github.com/dogrultucu/Group-Pancakes
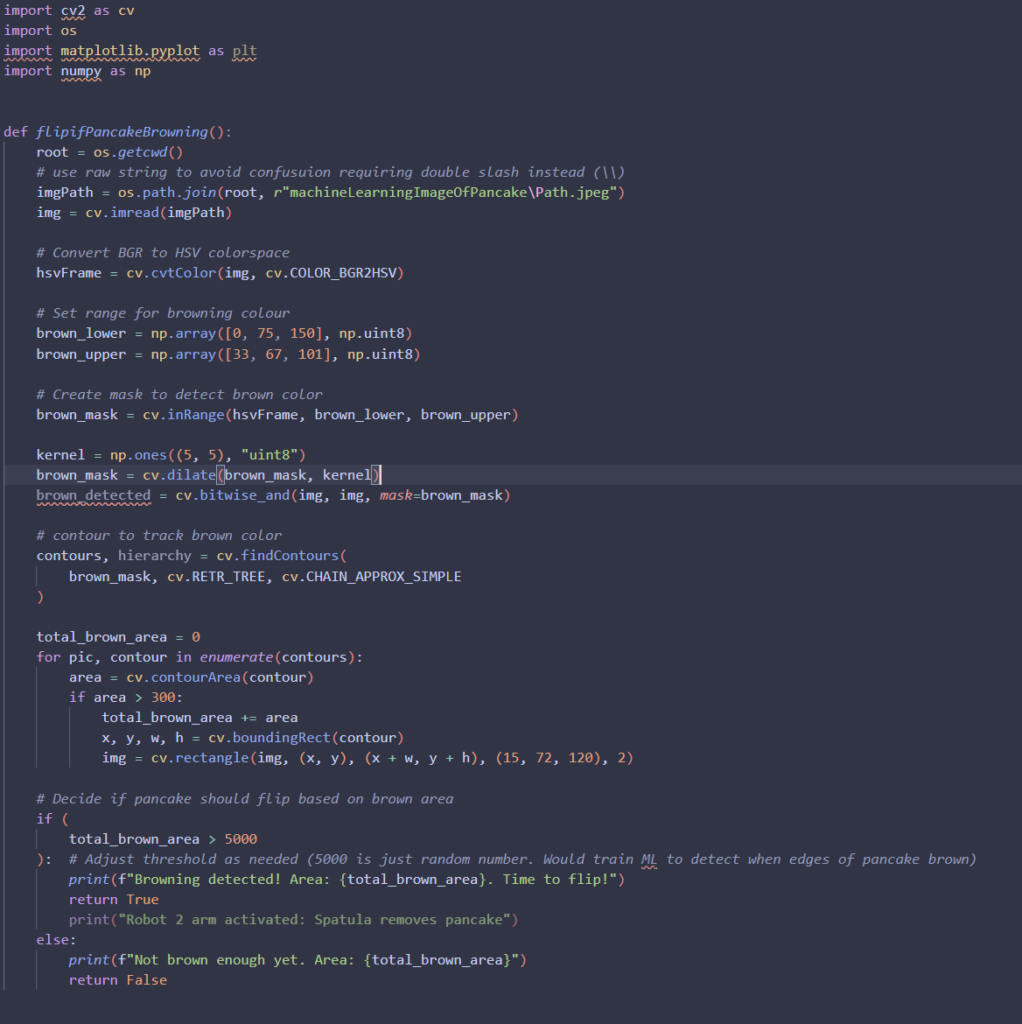
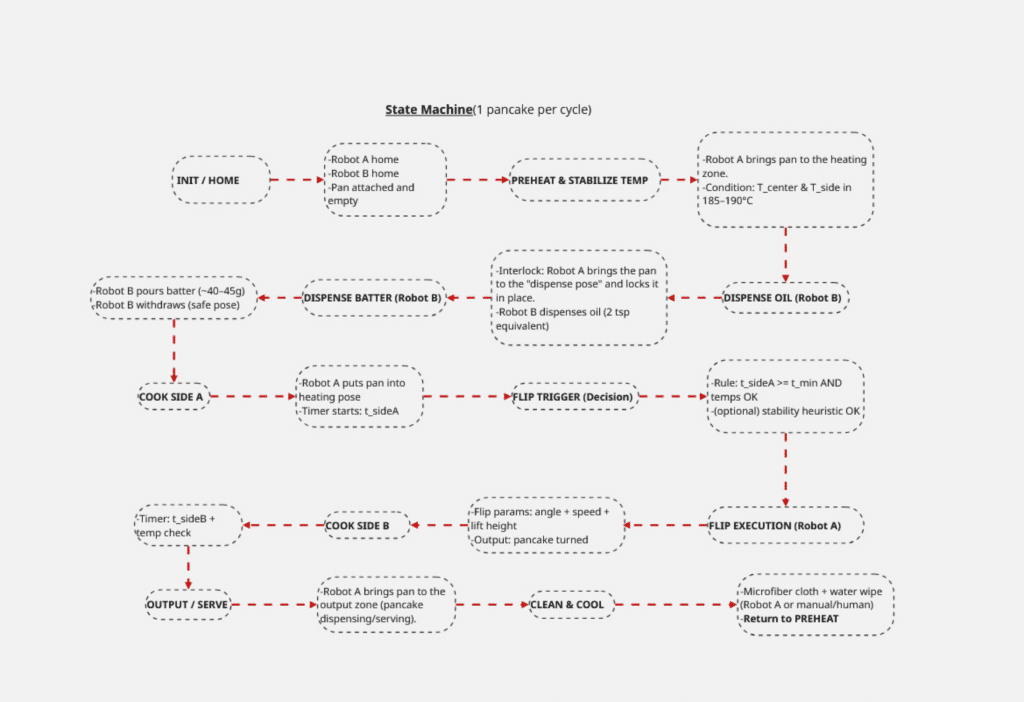
After this we looked at how Python, Docker and RViz could be used in synergy to further achieve success if we were actually taking the project on. This was addressed by the idea of using ML of the Maillard effect as a parameter to determine when the pancakes would be flipped (as per the cover image). The idea was to create a colour mask looking for brown areas and then applying an area in relation to the centroid of the pancake, so it would only mainly calculate the edges and when this reached a certain level, tell the robot to flip the pancake.
Robotic Kinematics, Perception Systems, ROS 2, RViz & Motion Planning in MoveIt

________________________________________________________________
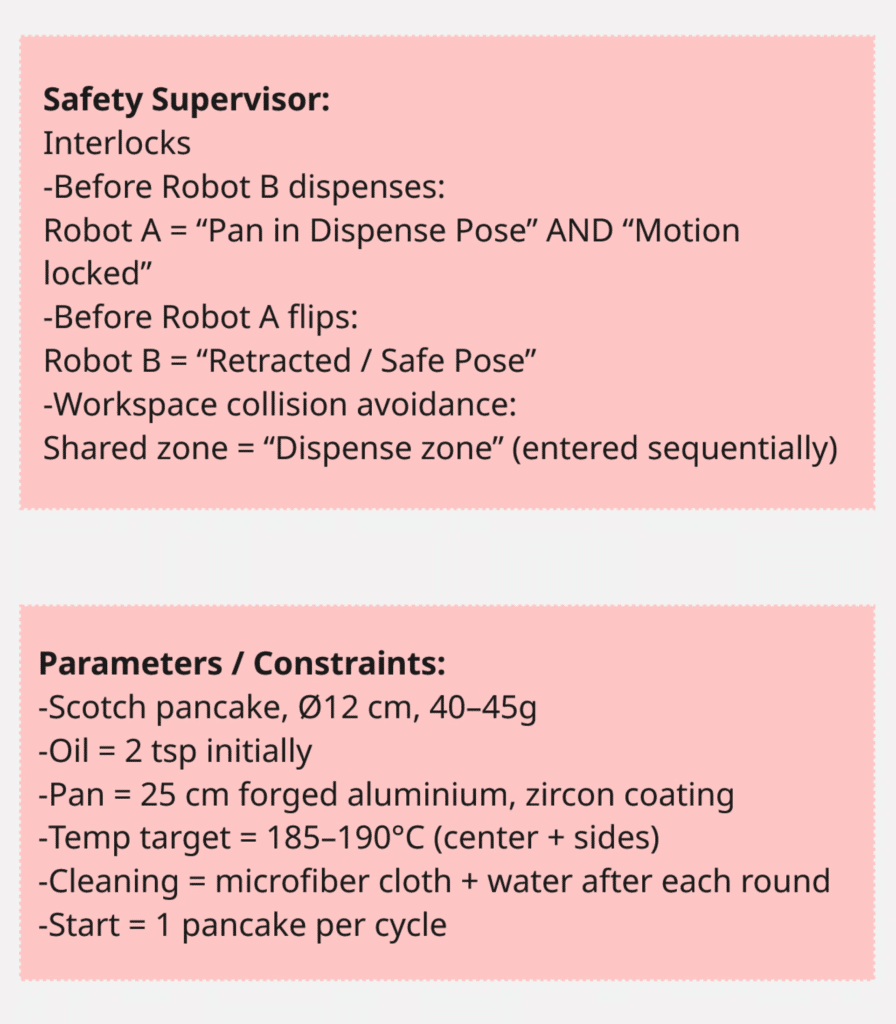
Robotic pseudocode for System Architecture
“One small step for robotics, one giant leap for pancake-kind”
