
The construction industry remains one of the least digitized sectors globally, yet it manages a $177 trillion market. Despite this massive scale, approximately 12–20% of total project costs are routinely lost to rework, largely driven by discrepancies between design plans and as-built site conditions.

As a proposal developed for our Software II course, we present the Automated Reality Construction Scanner (ARCS). This project serves as a practical application of our coursework, integrating complex system architecture and 3D data processing to bridge the gap between BIM models and physical reality. By leveraging autonomous robotics and geometric analysis, we aim to transform verification from a reactive process into a proactive, trade-specific coordination tool.
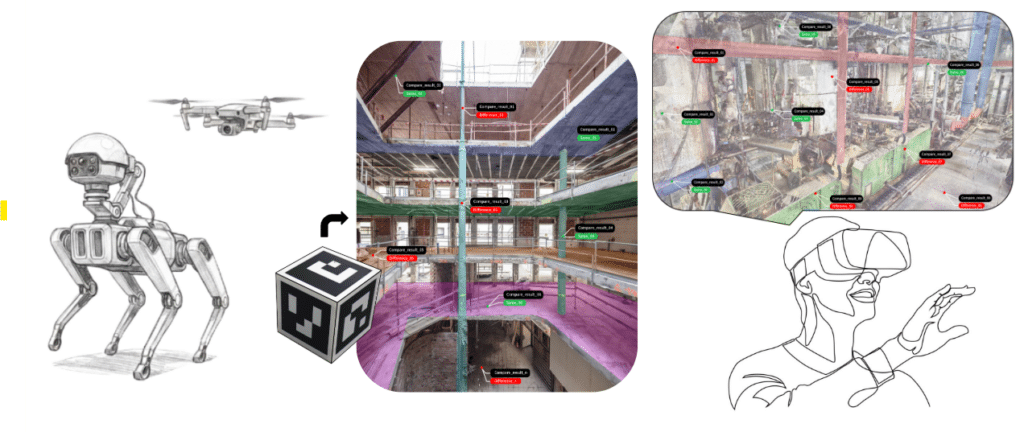
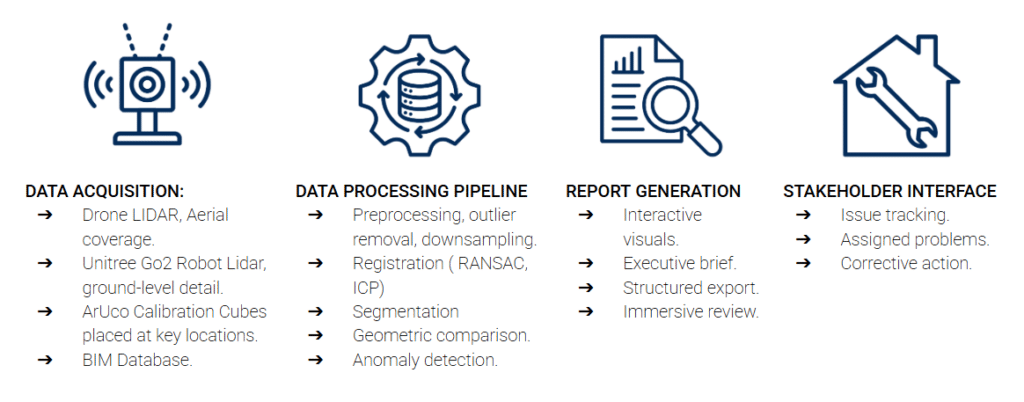
The technical core of the ARCS pipeline focuses on robust geometric processing rather than reliance on size heuristics. Our workflow begins with raw LiDAR/photogrammetry data, which inherently contains noise and floor planes that complicate automated measurements. We successfully implemented a modular architecture using RANSAC plane segmentation to robustly detect and remove floor surfaces, followed by DBSCAN clustering to isolate the target object from stray fragments
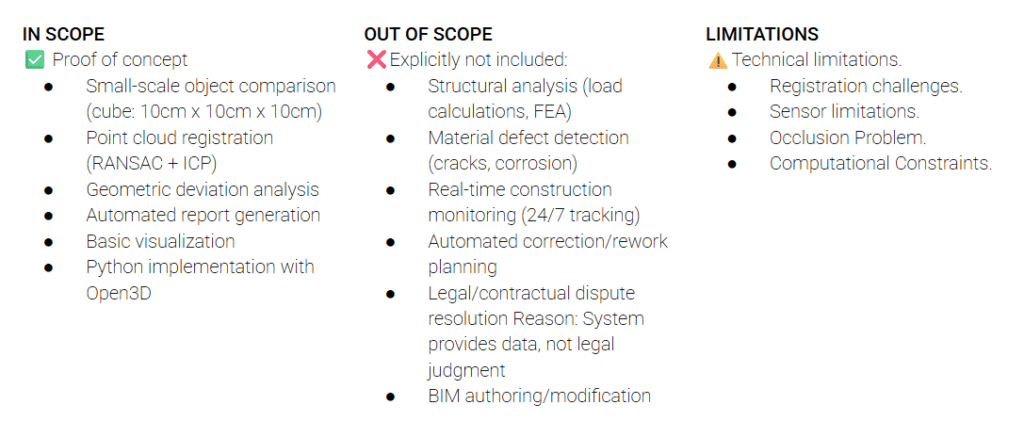
PROJECT SCOPE:
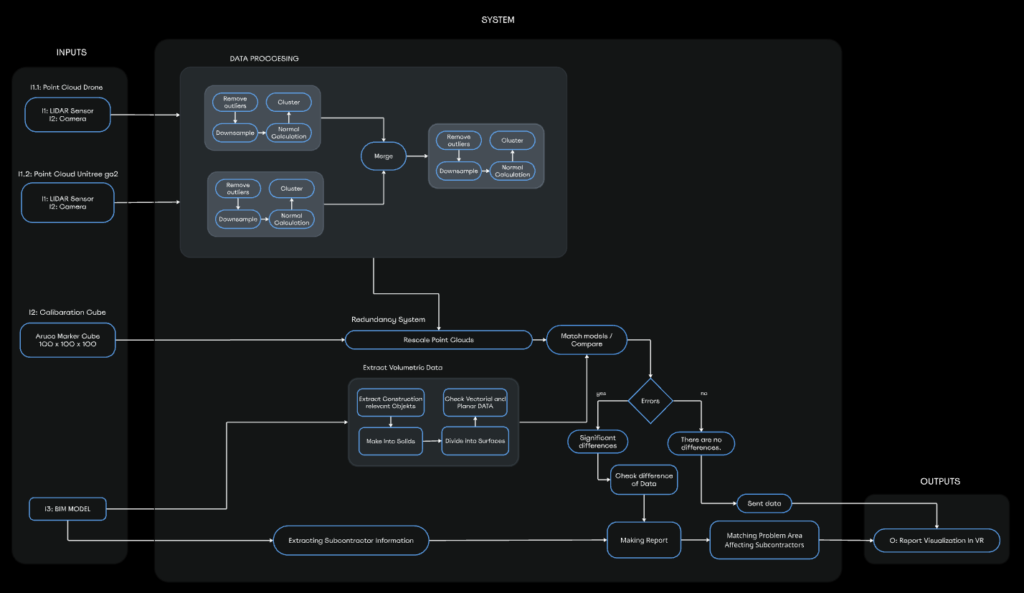
PROJECT ARCHITECTURE:
PROOF OF DESIGN CONCEPT:

RESULTS INTERPRETATION:
The core of our pipeline is built upon a robust, modular workflow designed to transform raw, noisy scan data into a precise, actionable digital twin. We begin by utilizing RANSAC plane segmentation to reliably detect and remove dominant floor surfaces, followed by DBSCAN clustering to isolate the target object from noise and floating fragments. To address scale drift, we integrate ArUco markers that serve as consistent, high-precision reference points, allowing us to align the raw point cloud accurately with the global coordinate system of the BIM database.
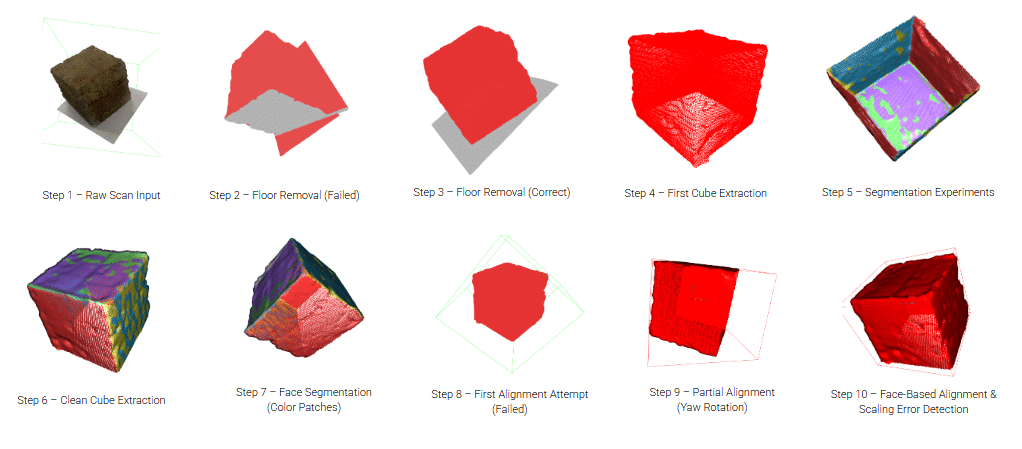
Once the object is isolated, the system executes a refinement process to ensure stable geometric representation. Rather than relying on unstable normals clustering, we define the object’s local XYZ frame using plane-based axis definition through cross-products of fitted orthogonal faces. This aligned data is then passed to a comparison engine that calculates geometric deviations against the design model, applying a tolerance filter to isolate only the differences that exceed 15–30mm. This processed information is finally classified into a trade-specific filtering engine, which ensures that only relevant anomalies—such as duct clashing or pipe route obstructions—are presented to the specific contractor responsible for that work.
FUTURE STEPS:
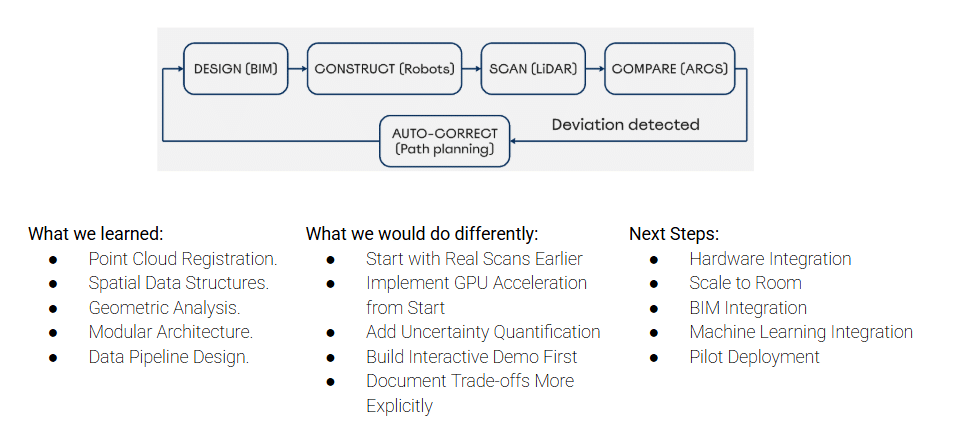
The development of ARCS demonstrates that complex system architecture can be effectively managed through modular, data-driven design, fulfilling the core requirements of our Software II project. While our current proposal focuses on a proof-of-concept for small-scale objects, the methodology proves that proactive as-built verification is not only technically feasible but economically imperative for reducing construction waste. Future steps include scaling this system to room-level environments, integrating machine learning for automated anomaly detection, and pursuing pilot deployments. Ultimately, ARCS represents a significant step toward a construction future where trades operate based on accurate, real-time data, significantly reducing the financial and temporal costs of traditional site coordination.
