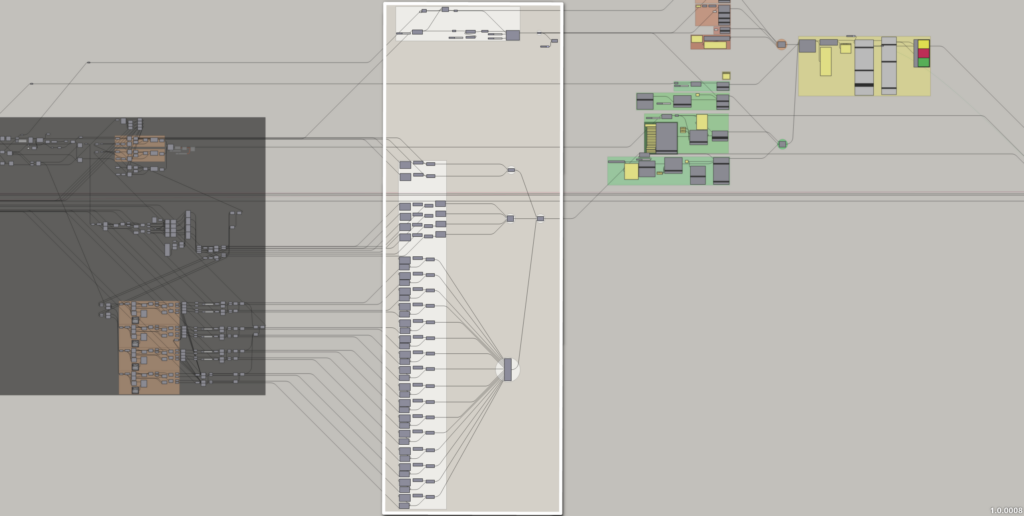
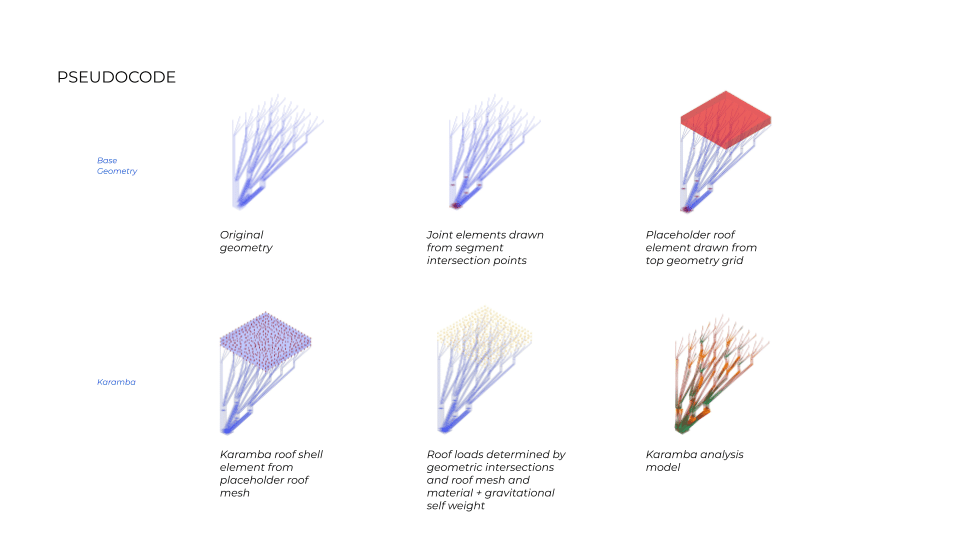
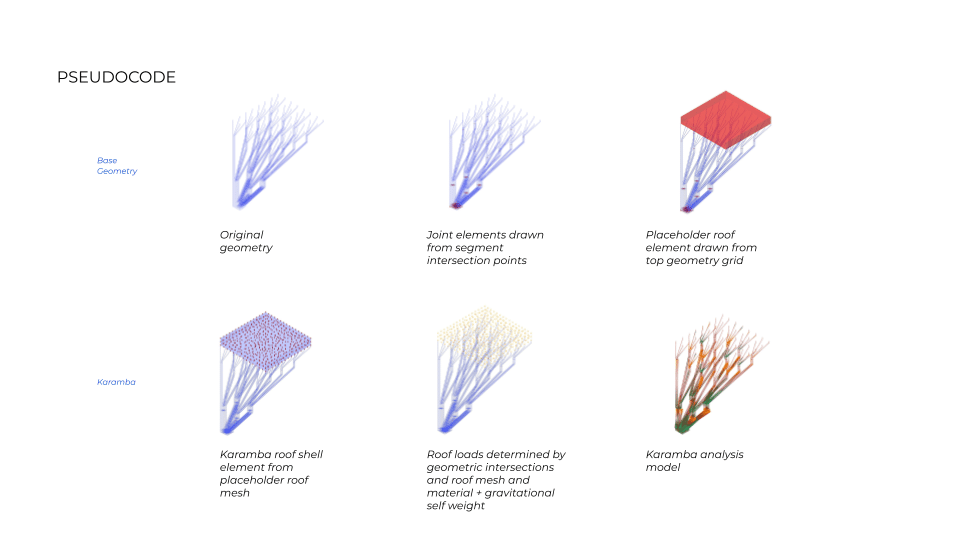
PSEUDOCODE
Base Geometry
Karamba
Sole Fitness Objective: MINIMIZE Deformation output in cm
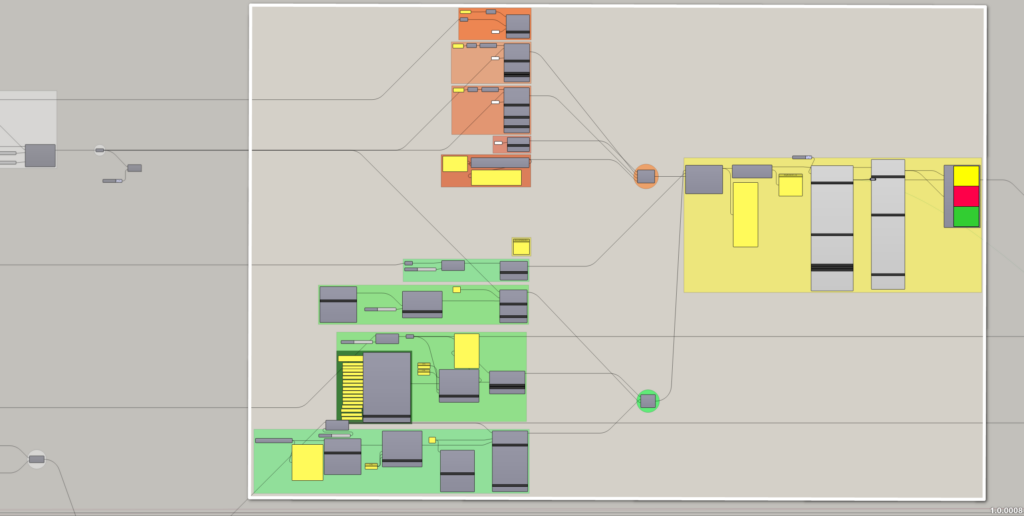
RATIO 1A
RATIO 1 B
RATIO 2
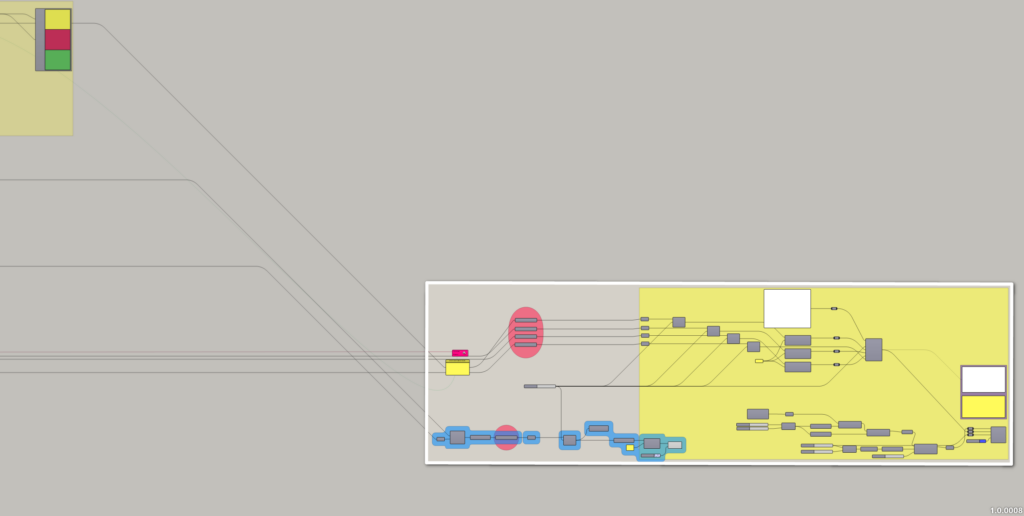
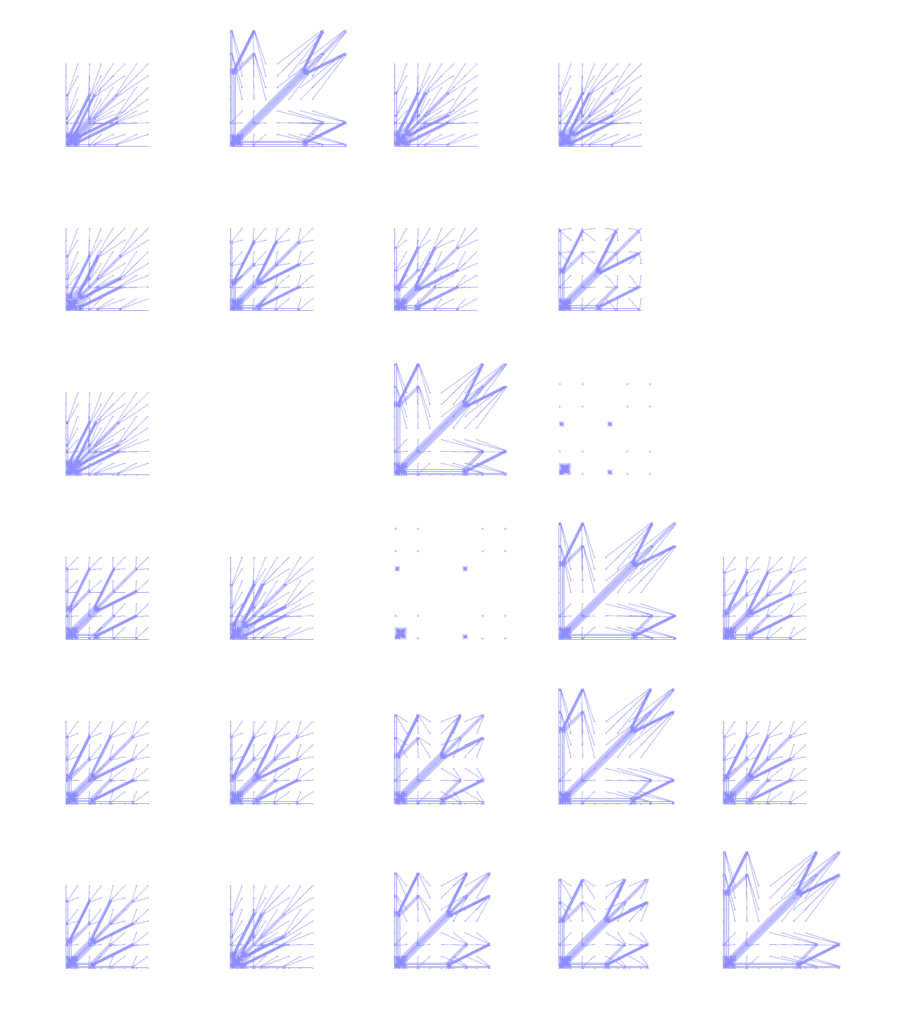
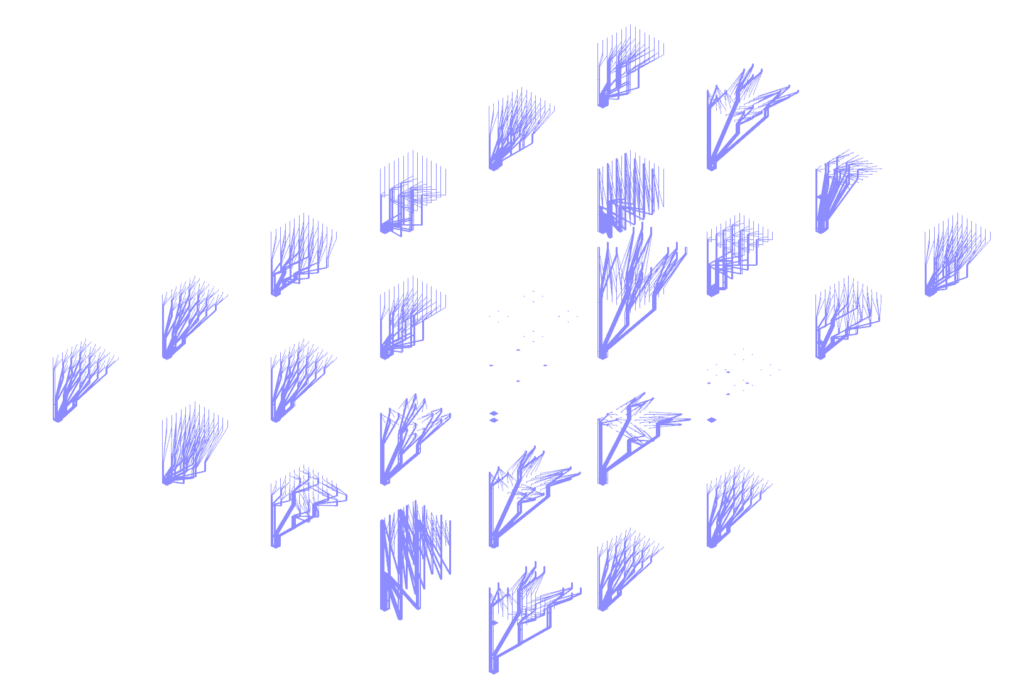
Analysed Iterations
Total Iteration Count: 1036
ITERATION
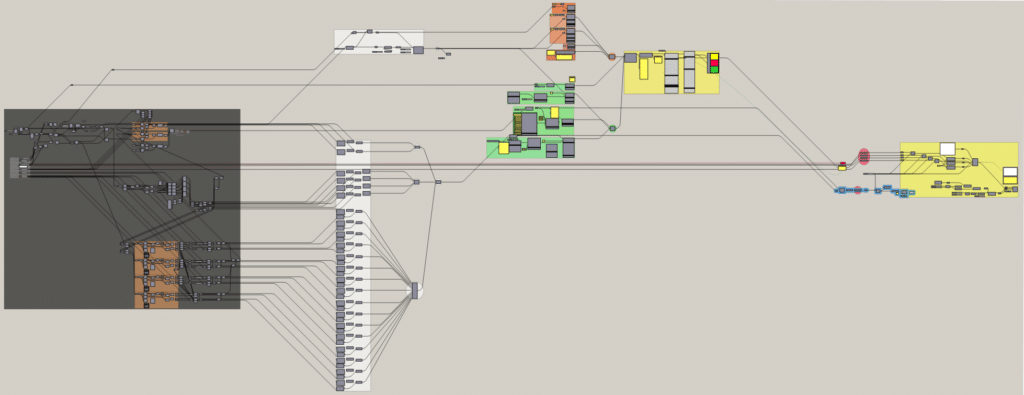
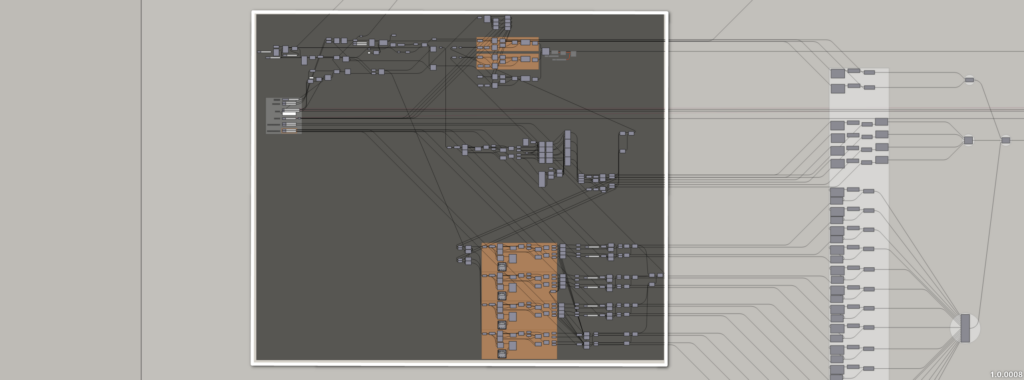
This part of script completed by Sejin Park in team for Robotics for Ecological Buildings Studio (geometry developed as team)