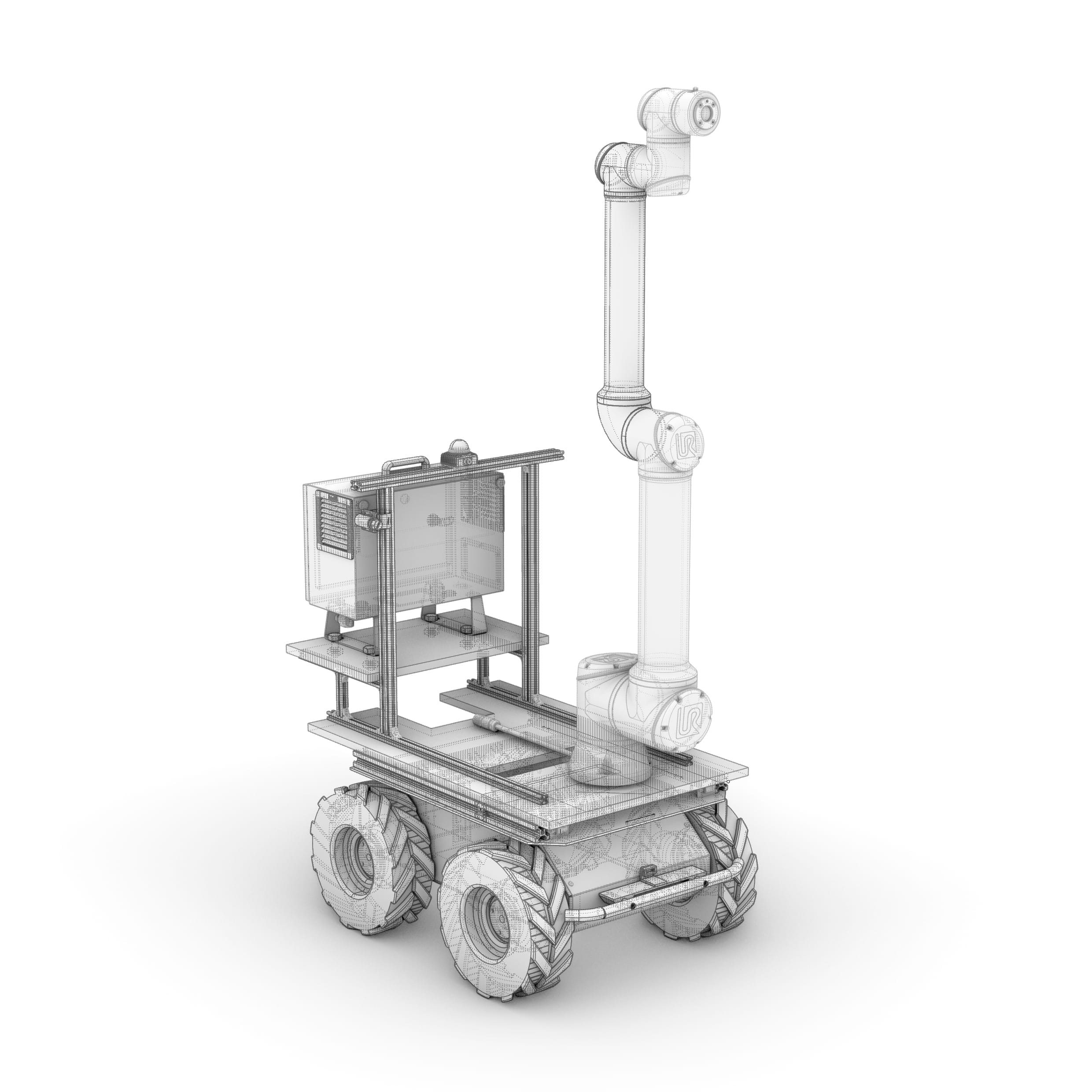
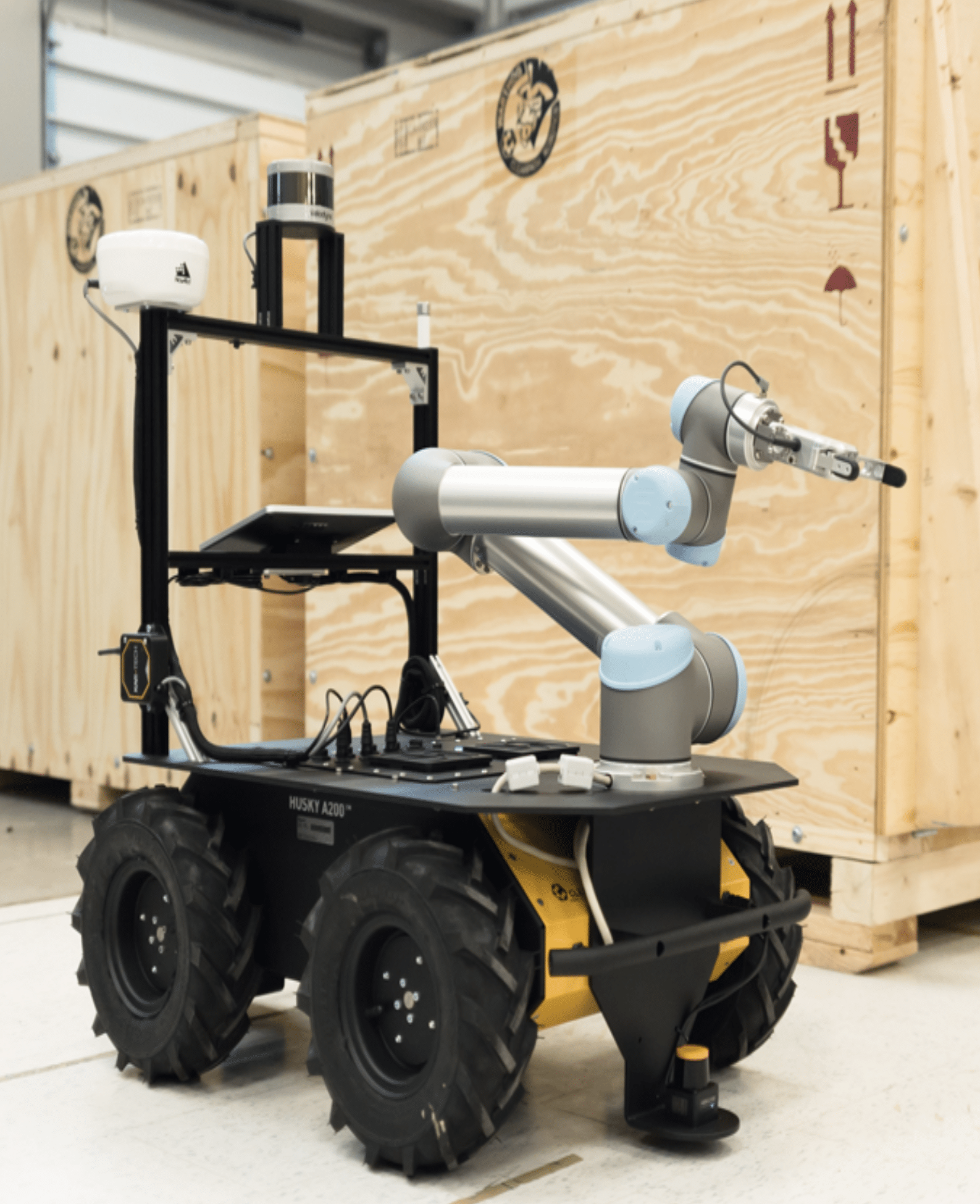
Mobile manipulator:

The course will start with a short review on motion planning using ROS and Moveit to refresh the participants knowledge on topics covered during the previous year. We will then expand on this and cover how to generate cooperation with manipulators and mobile platforms. The course will focus on configuring the mobile manipulator, utilising ROS for real-time control, motion planning, perception, and manipulation tasks. Through hands-on experience, students will gain insights into the challenges and solutions in mobile manipulation, sensor integration, and multi-robot coordination, preparing them for real-world applications in robotics automation.
Learning Objectives
The course aims to teach the students how to integrate different hardware and software modules in order to develop and demonstrate high complexity applications.
Term 1
- Robot in simulation
- Advanced concepts in ROS (Service, action, URDF, commander)
- Simulation of UR10e
- Simulation of Husky