

Potato Tower
Video: https://drive.google.com/file/d/1r3yyxQtWeZv6ADY_KyH7Zf4tiKYiu466/view?usp=sharing Github: https://github.com/sashakraeva/potatotower

Machine Learning for Robotic Fabrication

This seminar explores the intersection of machine learning and robotic fabrication, focusing on real-world applications in material manipulation, computer vision, and adaptive workflows. The course covers key ML techniques such as computer vision, reinforcement learning, and generative AI, applied to applications such as robotic assembly, 3D vision, and real-time fabrication processes. By the end of the seminar, students will have developed a working ML model integrated with a robotic fabrication task within the ROS framework.
Learning Objectives
By the end of this workshop, students will be able to:
Hardware / Software requirements
Linux Ubuntu 20.04 or higher
Video: https://drive.google.com/file/d/1r3yyxQtWeZv6ADY_KyH7Zf4tiKYiu466/view?usp=sharing Github: https://github.com/sashakraeva/potatotower
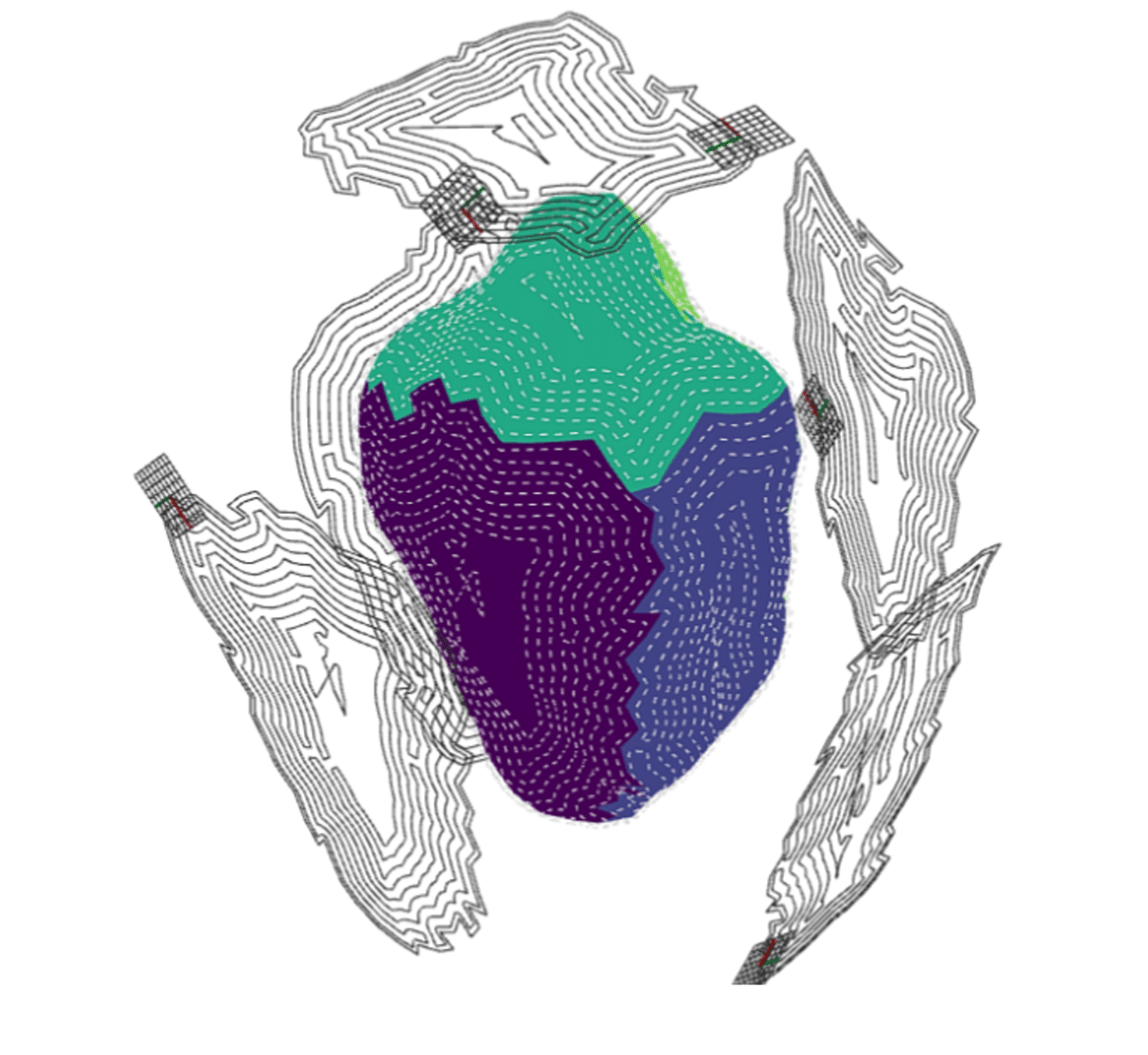
In the ongoing pursuit of efficient toolpath generation, we set out to build a modular, logic-driven system capable of planning subtractive manufacturing strategies. The framework integrated zonal segmentation, directional movement, and dynamic state awareness; its goal was adaptability and long-term scalability. While we achieved full system functionality, this initial iteration exposed the distance between a … Read more
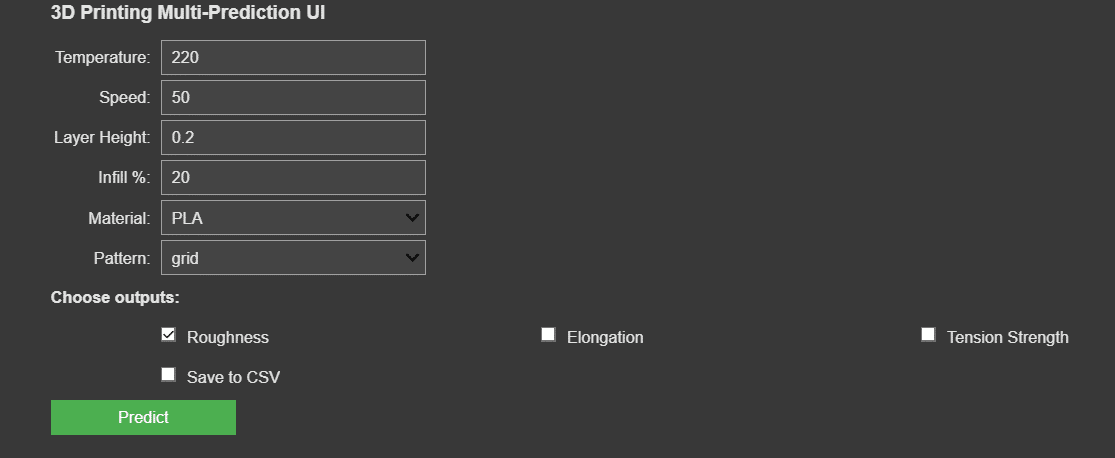
[ 1 ] FIRST QUESTIONS : The application of Machine Learning (ML) to the prediction of 3D printing parameters presents a challenge that necessitates a structured approach and raises many questions on how to approach this combination. To effectively explore this integration, it is essential to address three core questions: What are the process and the … Read more

Github : https://github.com/Clarrainl/UN_LOG-Factory | INTRODUCTION | Detecting wood defects in 3D-scanned logs using Machine Learning In the timber industry, a significant portion of wood gets discarded due to irregularities or defects that make it unusable under standard practices. However, many of these logs can still be used creatively or structurally if properly understood and classified. This project … Read more

Github: https://github.com/Adronegenius/Software-III-AI-Optimized-Earth-Injection-Deposits The process begins with human fabrication of woven modules using flexible rods or sticks. Due to tension, compression, and human variability, the woven pattern often deforms. Our system integrates computer vision to scan these deformations and a robotic arm to inject earth between structural members at optimized locations. This bridges physical craft and … Read more
adapted from IaaC´s Artificial Intelligence Program’s study of machine learning for robotic pick and place. (https://blog.iaac.net/reinforcement-learning-for-robotic-pick-and-place/research). Github Repository. https://github.com/LaurenD66/ROS-GridWorld-RL-with-Obstacles In a recent study by IaaC´s Artificial Intelligence Program, students used reinforcement learning models to train an (robotic) agent to move through a space defined by a simple grid from an origin to a goal, while … Read more
