The studio class will be structured into three main parts, each focusing on developing specific skill sets in symbiosis with the concurrent Software and Hardware classes. During the first term, students will be encouraged to develop physical work, both analogue (using their hand!) and robotic.
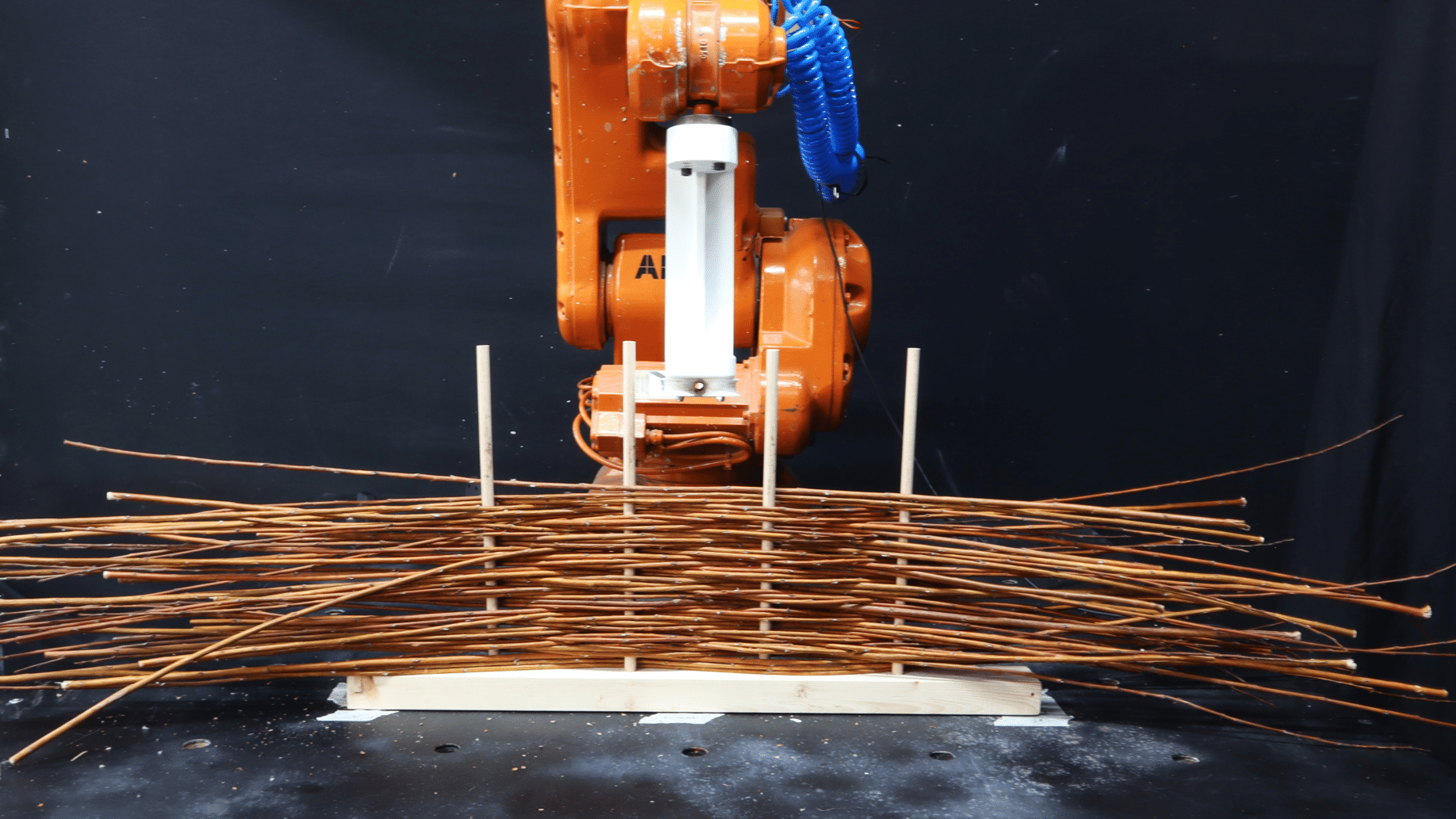
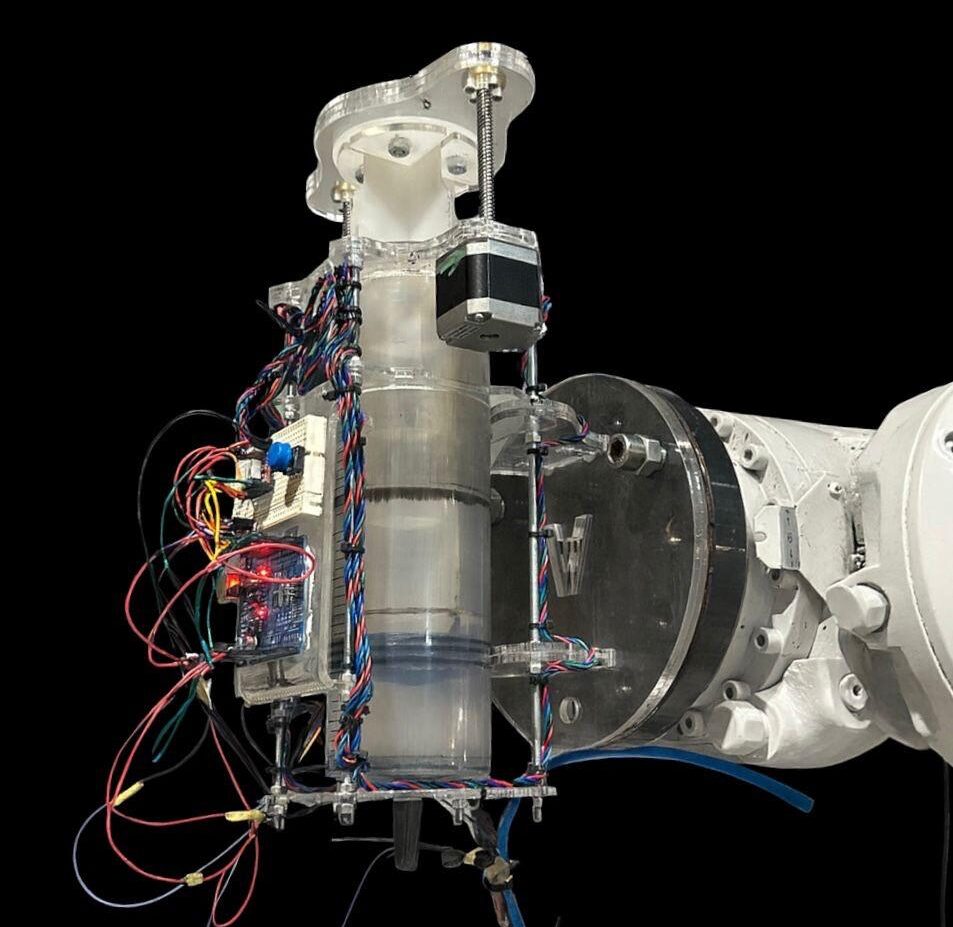
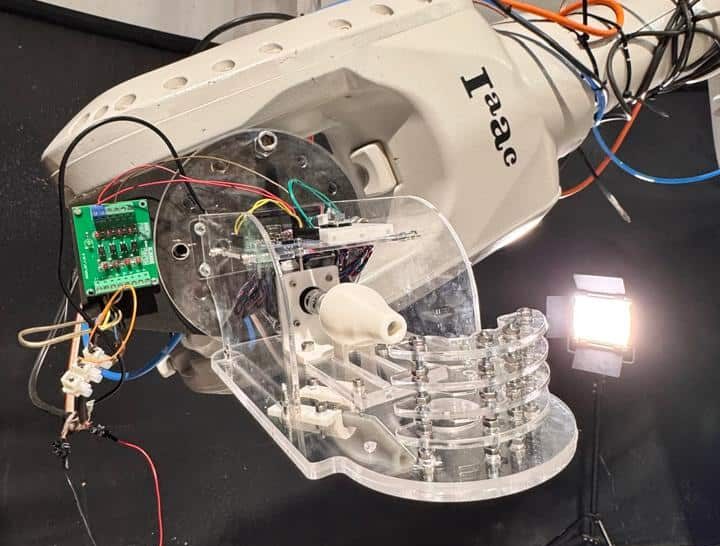
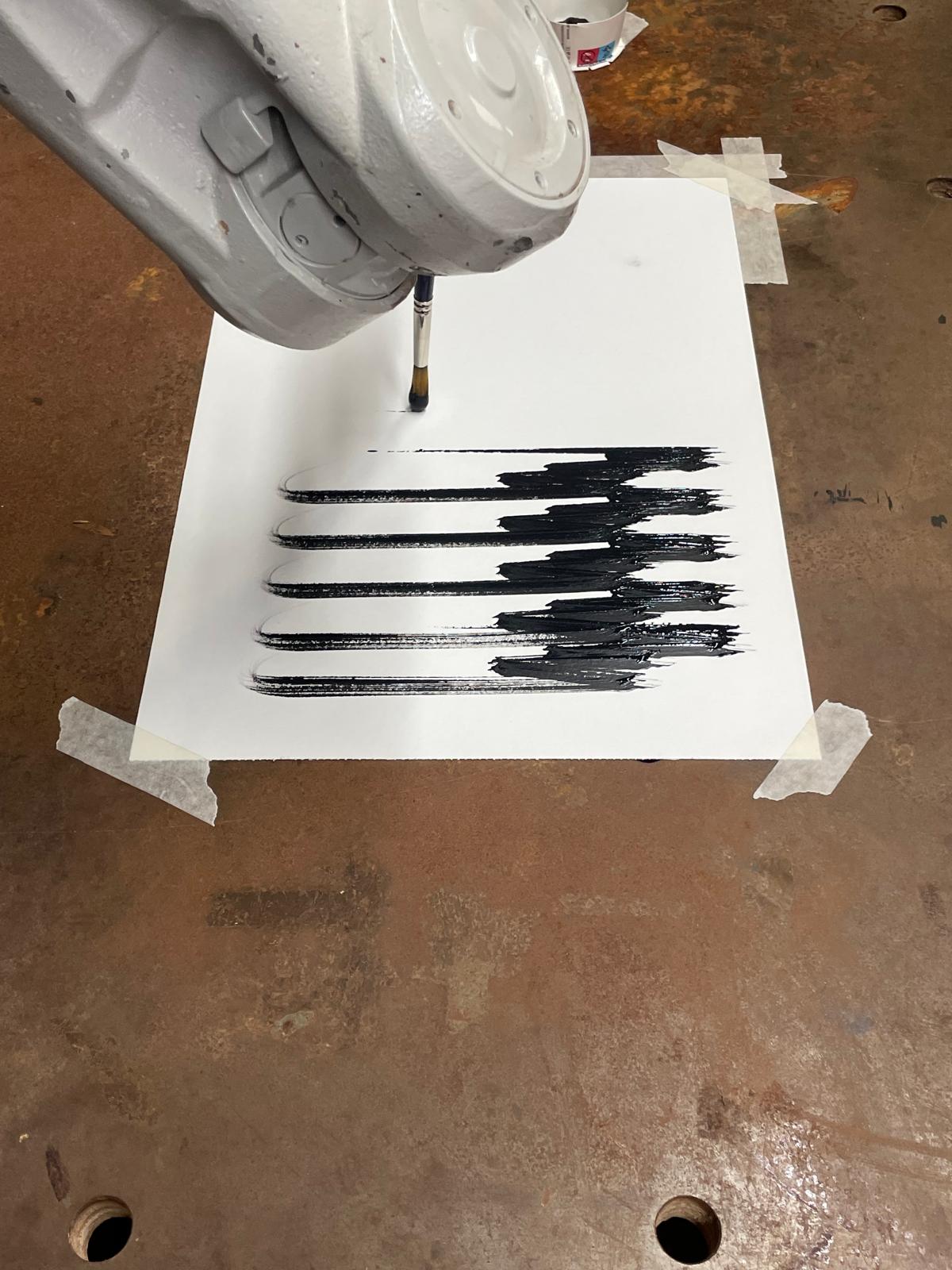
The 3 successive exercises – described in detail below – introduce different ideas and skill sets. During the first phase, you will use a paint brush mounted on the small ABB robots to automate a movement and leave a stroke of acrylic paint on a paper canvas. During the second phase we will make another acrylic painting, this time by spilling paint on a larger canvas. We will do this by designing and making our own tool, adapted to the robot in order to deploy the paint. In the third phase, we will work on the 3-dimensional shaping of black clay using both existing and invented tools, observing material behaviour and the numerous manipulations one can robotically apply onto a soft pasteous material.
The group’s configuration will change during every phase for students to get to know each other and enable a fresh start at each phase and next term! The outcome of the three phases will be used to organise small internal exhibitions. Moreover, you will be asked to document your work very thoroughly, using drawing and photography. And lastly, special attention will be given to filmmaking and photography, in order to capture moments and times and movements of your numerous experiments.