
A brief history and discussion on the future of Robotics
.
About
As part of the Theory and Context seminars, MRAC were lucky enough to hear from the one of Catalonia’s biggest tech group – Eurecat. This lecture was presented by previous IAAC faculty and current head of Robotics and Research at Eurecat: Daniel Serrano.
The following blog is a brief write up of the lecture and post Q&A discussion.
.
.

.
Introduction
Daniel started the talk by quickly introducing himself: from studying software engineering in Madrid, to working on underwater projects in Edinburgh, to his current position as the head of Robotics and Research at Eurecat, one of Catalonia’s largest tech hubs.
From here Daniel shared his thinking and pushed us to consider the deep history of robotics, from Ancient Greek mythology and figures such as Talos, the bronze golem built to defend Crete, and Archytas of Tarentum’s Flying Pigeon. He argued that robots have always been an aim of humanity, with humans themselves being made in the Gods’ image, leading to the anthropomorphic forms of the robots being built today.

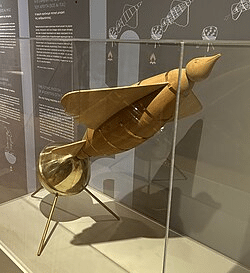
Depiction of Talos from film Jason and the Argonauts (1963) and wooden model of Archytas’ Flying Pigeon at the Kotsanas Museum of Ancient Greek Technology
.
Building on this history, we began to learn how we are currently in the advent of the 4th industrialisation: Digitalisation. With cameras and numerous other sensor/s, the bridge between the human and robot worlds and their capabilities is being formed by the sheer mass of data being understood and converted from analogue processes into digital figures that can be read by computers.
With robot learning and by feeding models heterogeneous tasks, robots are now able to use processes such as depth perception and dual manipulation- like a human, to perform tasks of increasing complexity, knowing how to orient themselves and the steps required to achieve the desired outcome.
This was accompanied by his own personal experience and examples: how, in times of crisis such as Hurricane Katrina,where Daniel was part of a team using autonomous robots allowing them wed us to carry out uncrewed inspections of rigs that would of been seem too risky for human life. Or years later during COVID, where suddenly the entire world attempted to bring innovation to deployment in just a few weeks as typical norms of human interaction were paused in order to combat the pandemic.
While extreme, these examples revealed an underlying truth as we move into the digital age: the need to fund and provide space for robotics as a worthwhile investment. This truth is now being reflected in Spain’s own educational fabric, where basic degree-level courses in Robotics are now available in different cities, something previously unavailable when Robotics was only available as postgraduate learning in Masters and PhD research.
From here Daniel dove into his current role at Eurecat and how they, as a major tech hub of Catalonia and Europe, are pushing what is possible.
One such project is ARSI, the Aerial Robot for Sewer Inspection.
ARSI
The issue of maintaining sewage systems is one which all cities face, including Barcelona. Sewer inspections are notoriously difficult, time-consuming and hazardous tasks for the workforce who carry them out. The inspection teams have to work in darkness, in areas of high humidity and uncomfortably low ceilings, and they always run the potential risk of being somewhere with toxic or explosive elements.

.
In order to address and avoid these issues, as our cities will only grow in the future, the European Clearing House for Open Robotics Development (ECHORD), in collaboration with the City of Barcelona, has developed a robotic system that would allow inspection brigades to carry out sewer inspections in a safer and more efficient way.
The idea is to use lightweight drone robots, also known as MAVs:
Unlike the current human workforce, MAVs are light and compact and easily able to manoeuvre through narrow, low-ceiling tunnels. Because they are aerial, they can continue working even when there are obstructions or obstacles on the ground, the area most likely to be damaged by the flow of sewage water. Crucially, a MAV allows brigades to carry out inspections efficiently from the surface, safe from the hazards of the sewers. The aim is not to replace the human team, but rather to pass the aspects we don’t want humans facing to the robot instead.
Finishing his presentation, Daniel kindly opened the floor to questions from the students.
.
Q&A
Question 1:
Subha Tahsin Saba: During the First Industrial Revolution, machines replaced a significant portion of human physical labour. Today, in the Fourth, digital, Revolution; artificial intelligence is transforming cognitive labour. While previous technological advances often only shifted workload rather than reducing it, how do you think digitalisation and AI will ultimately affect human life and work?
Daniel Serrano Answer: AI and digitalisation have the potential to make daily life more efficient by reducing the time and resources required for many tasks. They can also help expand access to education, employment, and opportunities, particularly in developing countries. However, there is a risk that advanced AI and robotic technologies may remain accessible only to wealthy organisations due to their high costs. While some jobs may be replaced, I believe that, as with previous technological revolutions, new forms of work will emerge. The key challenge will be ensuring that the benefits of these technologies are widely shared, so that they promote social progress rather than deepen existing inequalities.
.
Question 2:
Elias el Asmar: At one point you mentioned that you developed and use custom VLA pipelines to train robots in simulators. Why do you use these instead of conventional ones? For example, why use custom pipelines rather than Isaac Sim by NVIDIA?
Daniel Serrano Answer: Sorry, I misspoke. We fine-tune the VLA. We haven’t had the capability to develop our own VLA so far, and we are more focused on the strategy behind that layer. So we use this as a given model, like everyone else.
However, the project we are starting next month is actually a plan to develop a European model. Why? Because there is a discussion, given the current global situation, about sovereignty. We have already experienced, for example, a chip crisis. In a global crisis like that, if you have dependencies, you are in a weaker situation if things turn really bad. Europe, in the last decade and before, decapitalised its industry, and as a result we depend a lot on supply chains from other regions. While we don’t expect to fully recapitalise Europe in terms of chips, raw materials and batteries, we have to acknowledge that we currently depend on external suppliers. Now, the challenge in AI is to have your own model, so that you don’t depend on foreign models. In fact, this is also going to be the key differentiator for the future.
So, to return to your question: at the moment, we do use conventional models because they are more mature. But it’s important for us to have our own tools, our own models and our own data, so that we are prepared for whatever could happen in the future. There wasn’t this discussion, not so much, just five years ago. But now the world has changed in this direction over the last three or four years.
.
Question 3:
Sam Holcombe: You mentioned Eurecat has received funding for one of the EU’s projects to map the human brain with computational models. So, thinking in terms of technological development for example with the microscope: we discovered, through endosymbiosis, that our cells were made of many cells, and that these cells are actually cells that consumed other cells. So when you map the brain with AI and robotics, when we say we are developing the robots of future humans, do you think there’s a challenge in that it’s not just that they will change; we will also change as a species as we evolve alongside these new technologies? We are not the same humans we were a few hundred years ago, with all the technologies we have. So how well can you anticipate these humans that you are developing for, with technologies that will also change us as humans? Will we not also have a kind of endosymbiosis with those technologies?
Daniel Serrano Answer: No, again, I just referred to the Human Brain project as a reference, we did not participate on it. But let me first answer the question. I think we, humans and AI, are at two very different scales of thought. I don’t know if you’ve ever heard of the Montessori timeline of history? It is a concept used to teach children about human evolution, where they get the children to build a line, the historical, temporal line of the species. It’s like a massive line running through a whole building, and humans, we just appear in the last five centimetres of it. So yes, in our time frame, the time frame of the project, I think the evolution of nature will not change that much, in my opinion.
But I will also relate it to Moravec’s paradox. The statement is that we can emulate rational intelligence with computers. For instance, we can develop an algorithm that can beat the world champion at chess, which has been done. But we cannot recreate, with robots, the motion control or the perception capability that animals or humans have. And the explanation is related to what you said: it’s because the evolution of mammals, which are the ones most similar to us and with more dexterity in motion control, is hundreds of millions of years old. But the age of the rational brain is really young. So that’s the justification for why it’s taking much longer to emulate that experience of motion control and perception with algorithms, while we can already have a ChatGPT that seems to think like us. I mean, there is much more knowledge in evolution than we appreciate, while our intellectual brain is apparently quite simple.
Having said that, when researchers started to look at neural networks and came up with the idea of emulating that for an artificial intelligence algorithm, that was a revolution. And it’s the basis for everything we are seeing now: it’s how to emulate the brain.
Coming back to the Human Brain Project. I have not been able to follow all of it in detail, unfortunately, due to other commitments, but I think what will come in the future, very soon, is the aspect of brain control. When we understand the brain and its neuroplasticity well, or how it’s used for rehabilitation, but also the potential we don’t yet know about in controlling, or even the possibility of telekinesis and similar concepts. These are ideas that in the past we all thought were impossible, and now these areas of research are starting to show evidence that it could happen, based on quantum theory. So that is, I think, something that will come to fruition at some point, which is quite exciting.

{kind=link}