Understanding the way pedestrians move through space is a task of heavy importance in the design and analysis of public space. It is fundamental to understand the motivations and utilities that influence the way pedestrians move through space. In cities such as Bogota, Colombia, heavy car-centered infrastructure has fragmented the city into clusters that limit the accesibility of pedestrians, as wide highways interrumpt the desire paths of inhabitants. This not only means a bad representation of discomfort to users, but also fosters the occurance of road safety incidents.
As a case study, the flow of a sample of students leaving their school is simulated. The selected site is Ricaurte Public School located in Bogota’s trunk highway Avenue NQS in front of the TransMilenio BRT station Ricaurte. The exercise looks forward to model the flow of students as they move outwards from school, relating with the infrastructure and built environment around them.
By utilizing the methodology of autonomous agent simulation, different layers in the understanding of pedestrians’ mobility desires are represented and assessed.
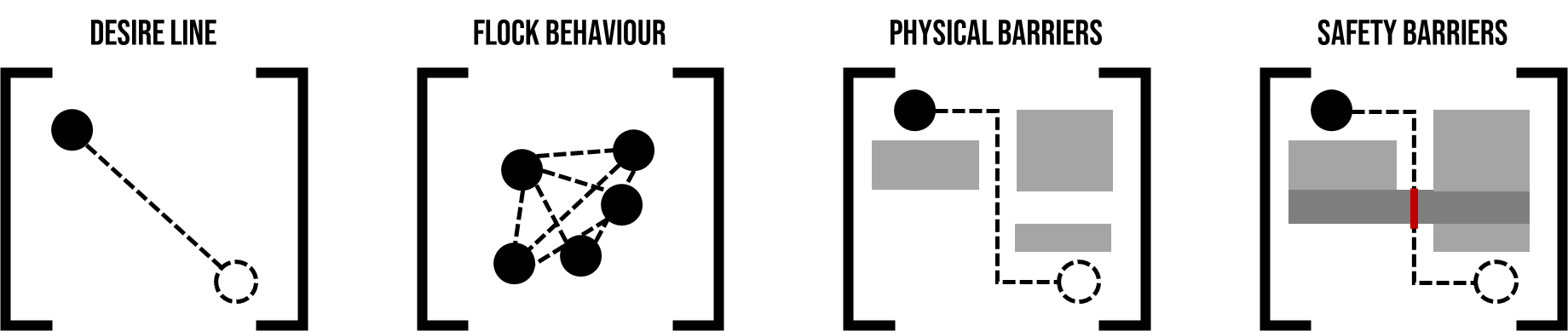
The Desire Line
A Desire Line is the representation of the direct and linear connection between the origin and destination of a trip. If they were no spatial restrictions, obstacles or boundaries, pedestrians would follow the desire line directly, being the shortest path between the two points to connect.
By this logic, students would be able to reach their homes from school by following a straight line connecting these points.
When simulating agents behaviour, there are four vectors that contribute having a more realistic crowd model: alignment, cohesion, separation and steering. The first two, foster the agents to stay together as a flock, while separation allows to maintain a minimum distance within each other. Steering avoids drastic changes in direction.
Physical Obstacles
When the built environment is taken into account, buildings and other solid elements which are physical barriers, become entities that limit and modify the flow of movement. In the case study, agents are no longer able to follow a straight line, as buildings’ layouts cannot be ignored. The methodology for the simulation takes advantage of the visibility measure in space to calculate the global effect of proximity to destination, as well as the local effect of range of movement from the location of the agent. Besides, an additional vector for leaving obstacles is utilized to minimize the effort of agents within buildings to find paths in the public space.
Safety Obstacles and Useless Links
The location of wide roads limits the movement of pedestrians as crossing them implies a heavy risk of road safety incidents. The trunk road present within the example exercise, demonstrates how much it diverts the possibility of direct flow of pedestrians from one side of the road to another. Eventhough the city has developed pedestrian bridges, to foster a safe crossing, the simulation demonstrates how poorly attractive it is for pedestrian to be used, as it increases the changes in direction and length of the final path, therefore agents are fostered to continue the momentum of crossing the road even under risky means. The inhability of modelling the scenario where agents follow the exact path of the bridge, demonstrates how this restrictive measure goes against the natural desire of movement of the pedestrian actors.