
Concept
William Darrell describes his kinetic sculptures as “mechanically abstracted organisms,” animated forms that pulse, shimmy, and spin with lifelike motion. The London-based artist is inspired by the relationship between the organic and the mechanical along with the enticing, mesmerizing qualities of movement that can coax “fear or fascination” from the viewer.
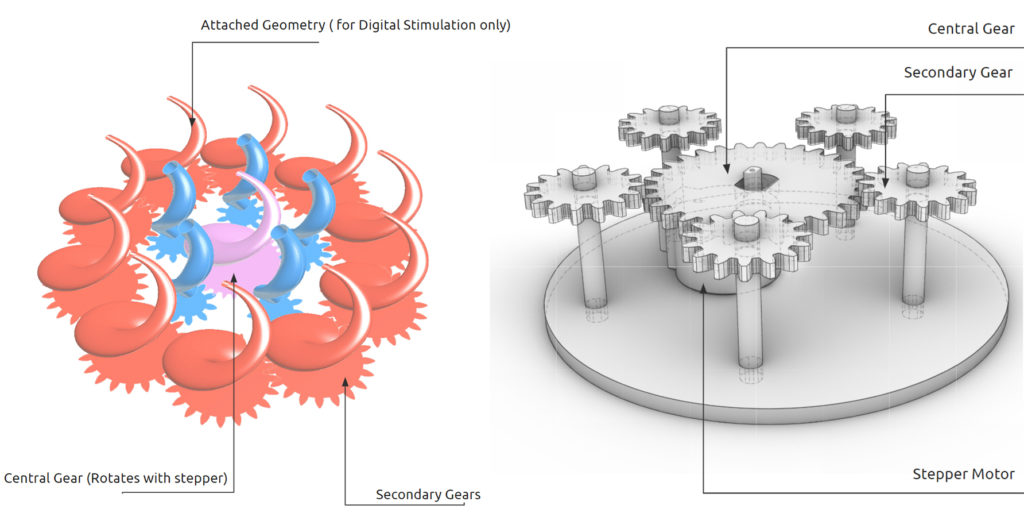
Kaleidoscopic Sculptures is a project inspired by the works of William Darrell. Additionally this system responds to light. The system is for a kinetic flower , whose petals rotate more when there is more light. When there is no light the flower does not rotate. This was achieved by a system of a central gear around which multiple gears are attached .
Darrell 3D-prints each work to achieve the necessary level of precision. Every component needs to align perfectly to create such methodical, entrancing motions, powered by a single motor and a mix of gears, belts, magnets, cams, and elastic bands.
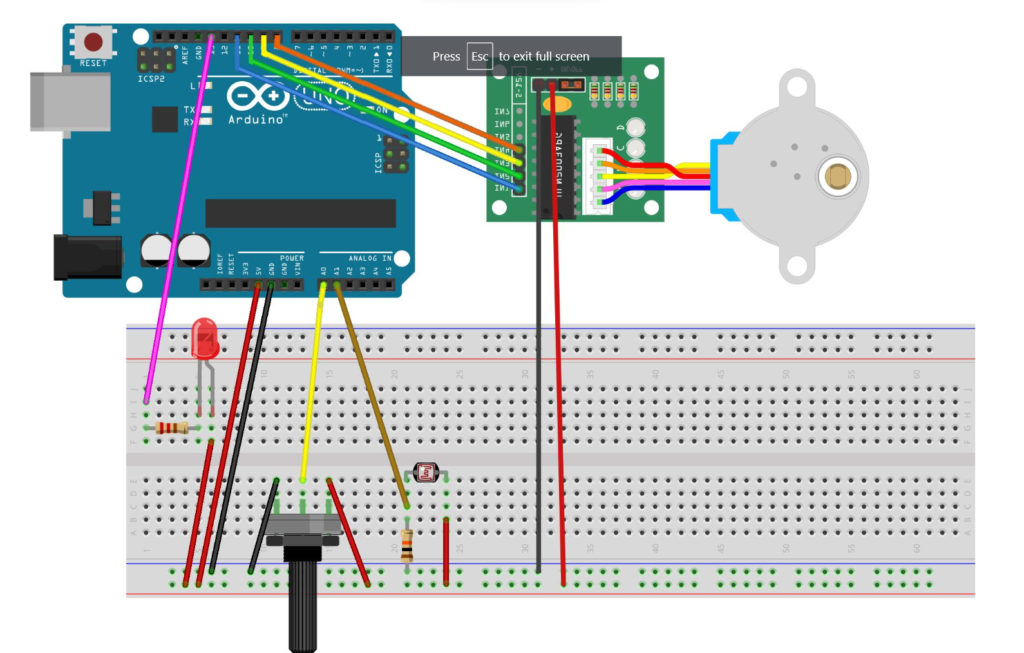
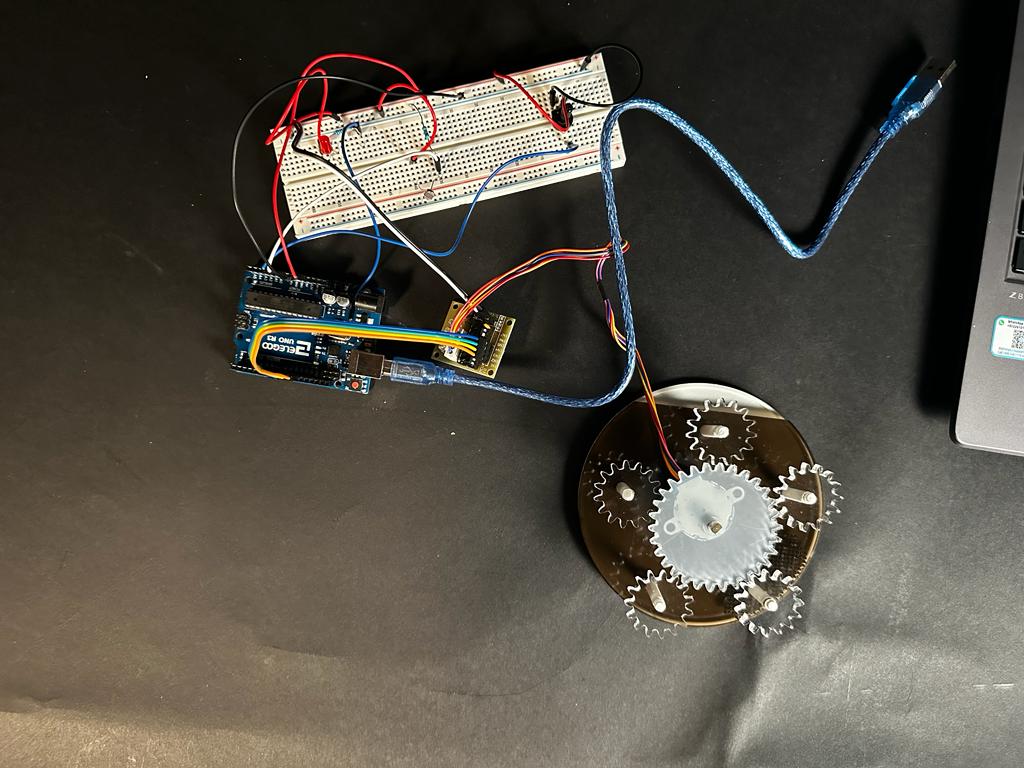
In my simulation the stepper motor is to the central gear. The speed of the central gear is controlled by a remapped value of the LDR, which is amplified by the input from potentiometer. The final value is also supplied to a LED that blinks quicker, when the value is higher. Each flower petal can be connected to the gears and then rotate. It is noted that for the sake of the experiment only 1 central gear and 5 surrounding gears are used, but the number of gears can increase based on the petals of the flower.
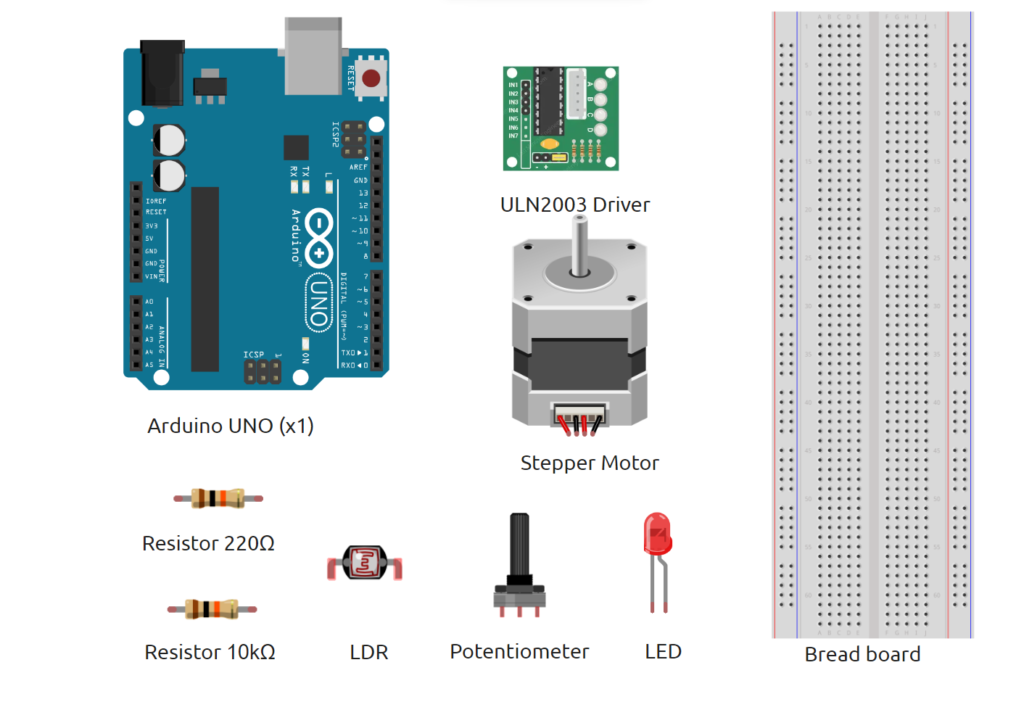
Bill of Materials
Schematic Diagram
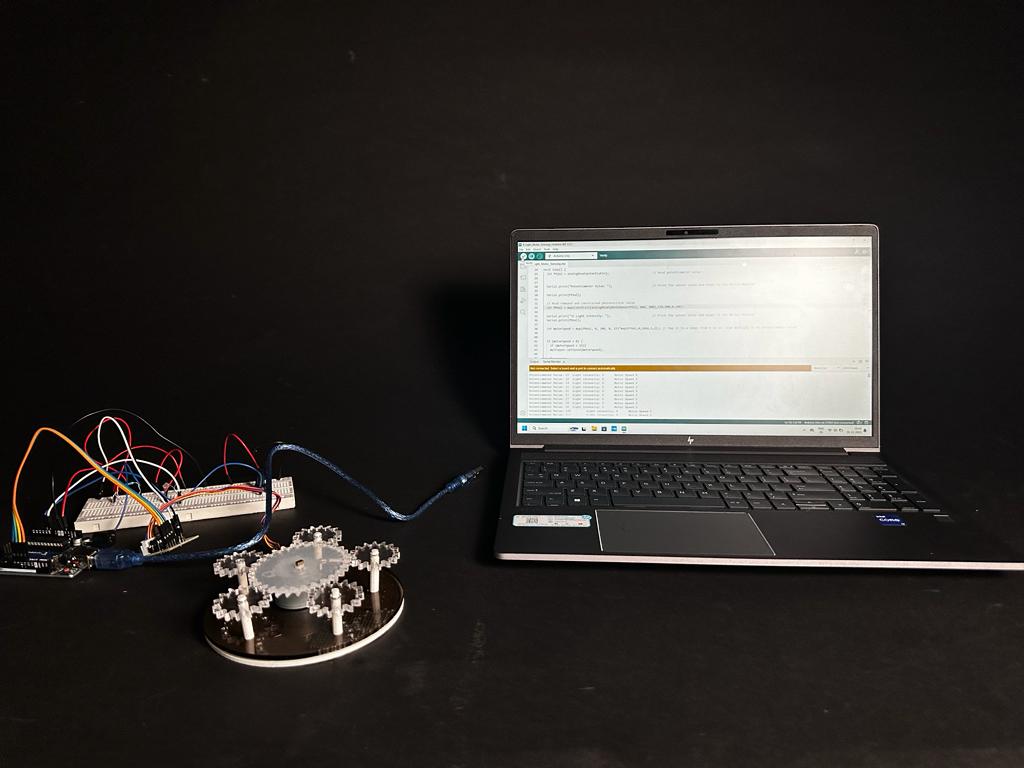
Code Script

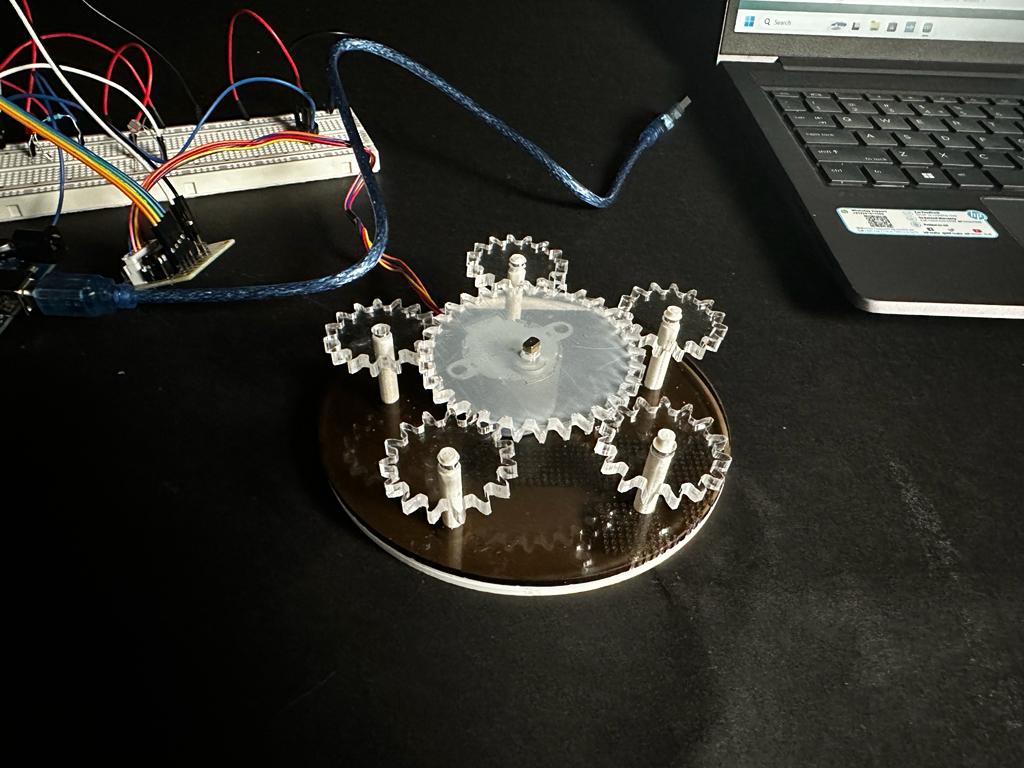
Prototype
Limitations: This project had a lot of limitations, due to current power of the motor more than 1 gear cannot turn. Also limited time, led me to not print the petals on the gears . I had to limit myself to 1 level of gears only.
Future Steps
- The future steps would be to use this strategy in kinetic and responsive facade systems, and remove the limitations that came during this research due to limit of time and resources.
- Try more combinations with increases number of gears and attachments.
- This strategy can be used in various scenarios, not just as a sculpture; but also to optimise light and solar outputs for facades…
- It would be also interesting to use different sensors in addition to LDR.

Source :https://www.thisiscolossal.com/2023/10/william-darrell-kinetic-sculptures/
