
We programmed a turtlebot to identify and follow (at a respectful distance) the object of its affection: a simple yellow disk.
We used the following in our project:
Hardware
- Turtlebot
- Astra Camera
- Target object
Software
- ROS Noetic
- OpenCV (with ROS bridge)

Using Simultaneous Localization and Mapping
To complete the process, a ROS node subscribed to the image topic being published that contained video from the Astra camera. The feed was converted to be compatible with OpenCV so that it could be analyzed using computer vision.
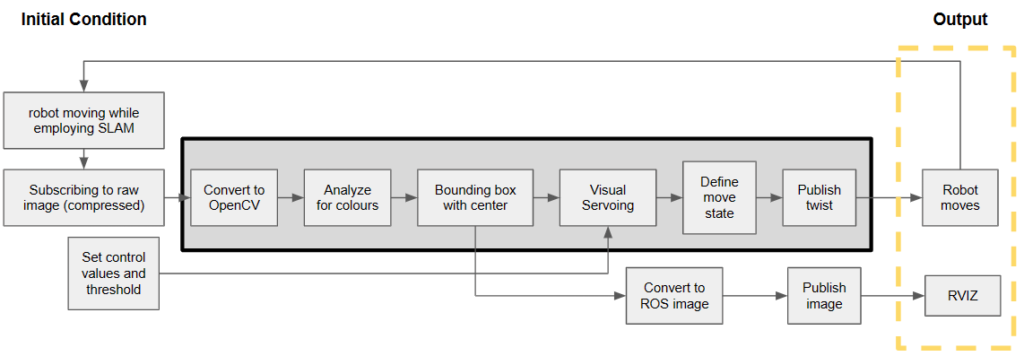
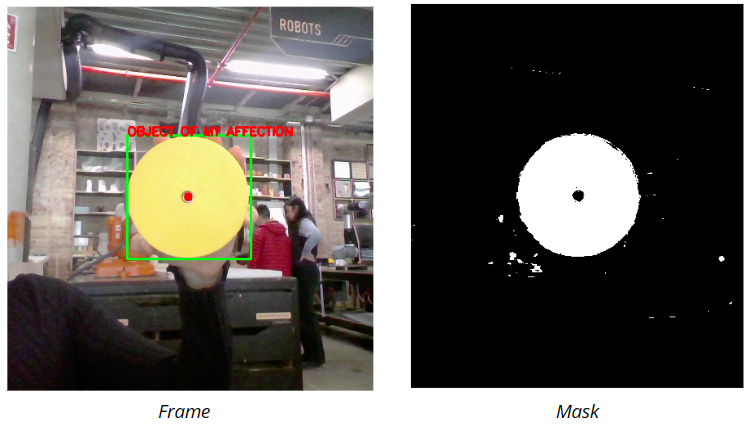
To determine the appropriate RGB range we created a script that would output the upper and lower bounds of a colour that we selected in the image by clicking on it.

A bounding box was placed around the image, the properties of which we used as a simple indicator to determine the object’s position relative to the robot.

Following the object visually with OpenCV
We used the properties of the bounding box (dimensions and center) to determine the relative distance and thus the required linear and angular commands for the robot.
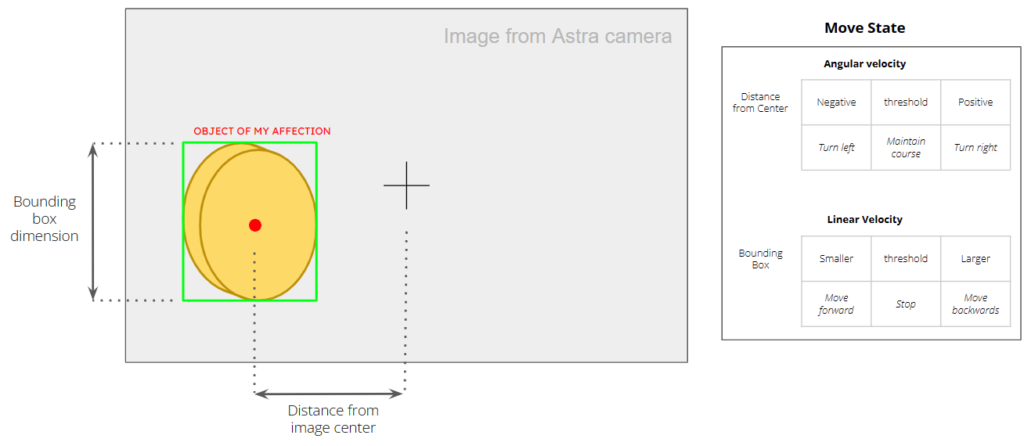
Using this process we were able to control the movement of the turtlebot by moving the yellow disc around. The turtlebot would approach the disk until a specific distance where it would stop, and would back up if the disc got too close.
However, the allure of a giant yellow garbage can proved to be too great and turtlebot was haplessly seduced. Tisk tisk, turtelbot, tisk tisk…
