DRDA- Dynamic Robotic Design Activities
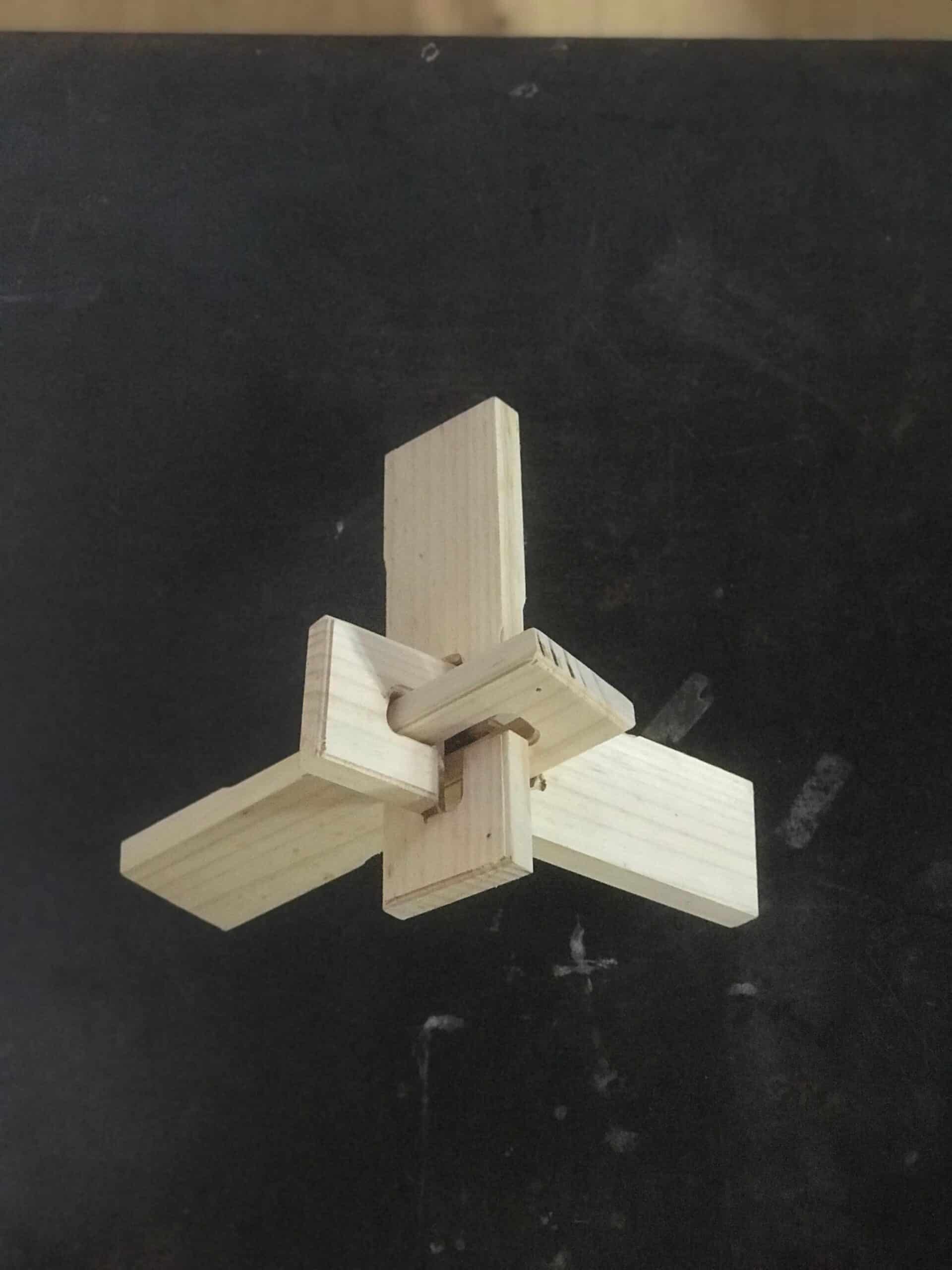
ABSTRACT Autonomous parametric furniture assembly using modular blocks and ROS-driven industrial robots promises to revolutionize on-demand manufacturing. In this work, we introduce DRDA (Dynamic Robotic Design Activities), a unified framework that seamlessly links customer-driven design to autonomous multi-robot execution. A user-defined geometry and style, which our custom block-selection and toolpath-generation engine converts into collision-free pick-and-place … Read more