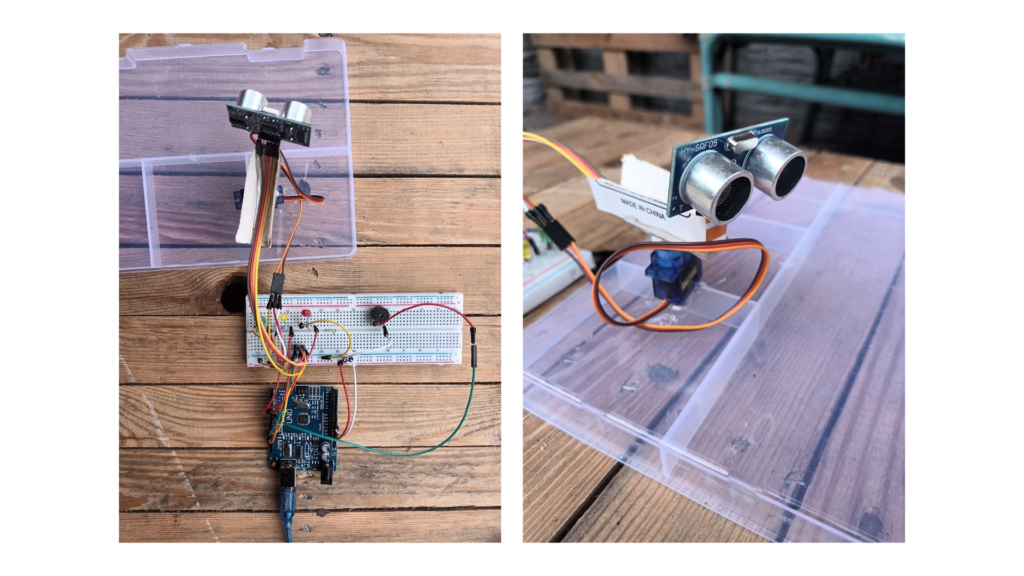
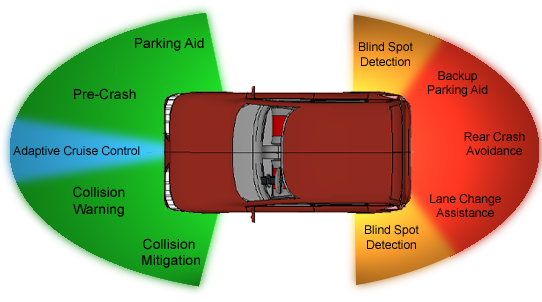
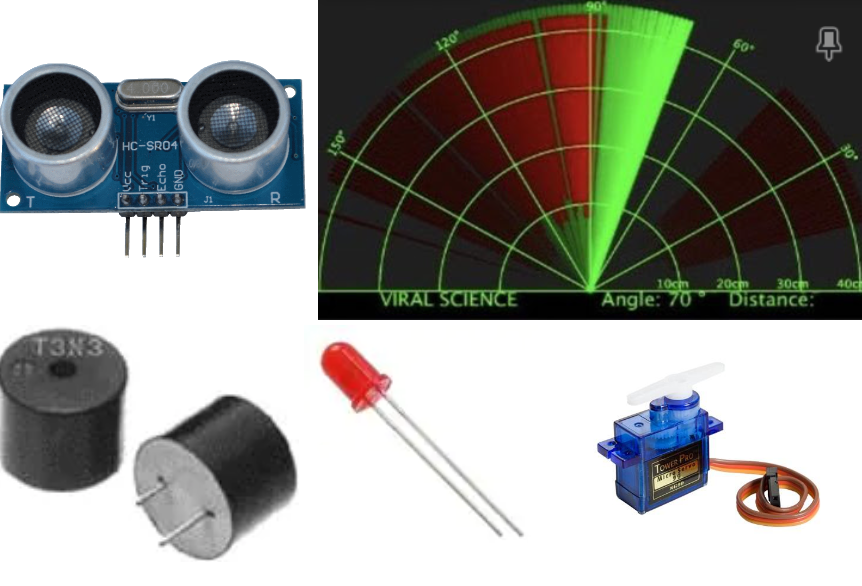
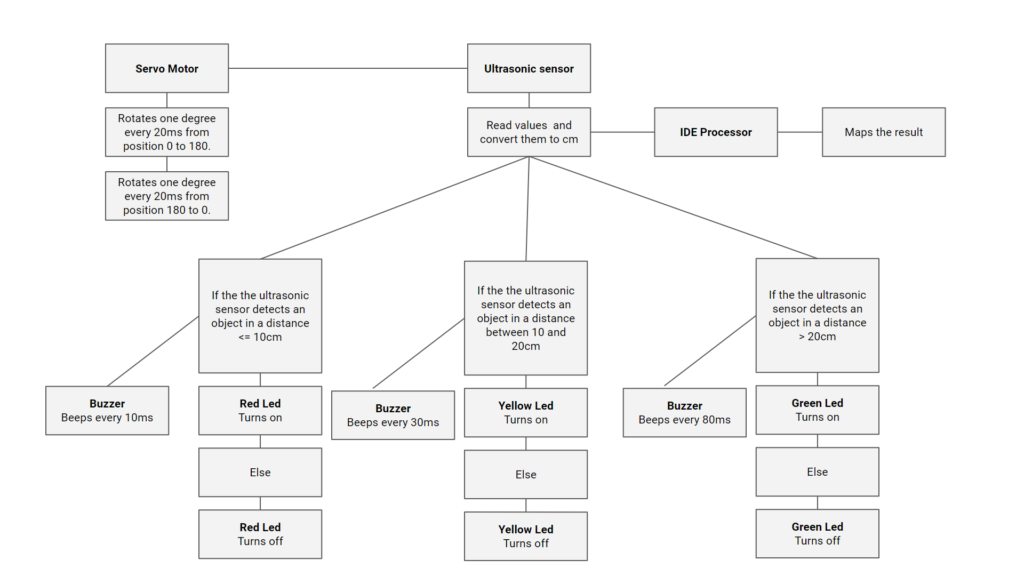
The system consists in a Radar that works similarly as a car sensor. It is made out of an ultrasonic sensor that can detect objects and can identify the distance where they are. This sensor rotates 180 degrees in a servomotor and when the information gets back is processed by IDE Processing to map the position of the objects in the surroundings. Three leds, green yellow and red also indicate the distance of the elements detected by the radar and a buzzer express how close the objects are by the frequency of it sound.
The main idea of the project is to combine different sensors and actuators to create a more complex system where the various elements work together to create a series of outputs. The objective is to test this interrelations that create the system and to try to process and map the digital inputs into a drawing.
FUNCTIONS
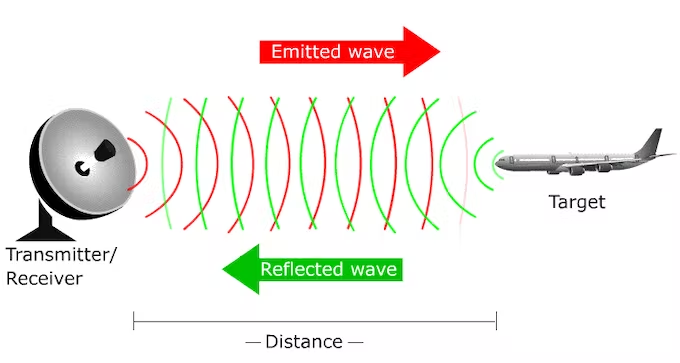
Rotating Ultrasonic Sensor
This sensor rotates 180 degrees and detects the distance of the objects arround. It creates a sound every 50ms and with the returning sound calculates the distance in centimeters. The results appear in the serial port screen and are then processed to create a radar image.
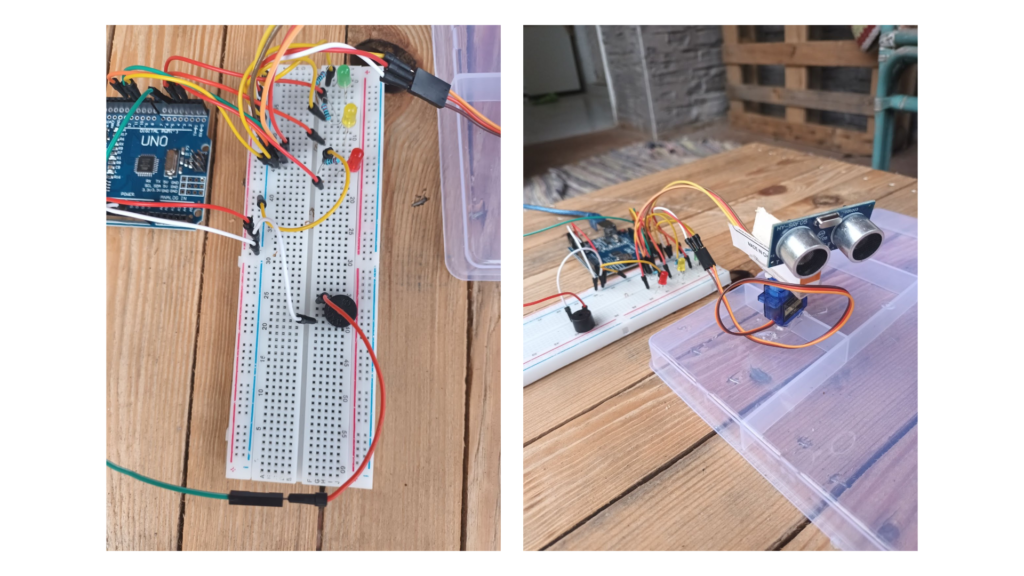
Led lights
The led lights indicate the distance of the object by turning on the green light when the object detected is further than 20cm, the yellow light when the object is between 20 and 10 cm and the red light when the object is closer than 10 cm.
Buzzer
As in a car parking assistance device, the buzzer beeps faster everytime the object gets closer to the sensor, to make noticeable when there is danger of crashing. It works as an alarm that detects the proximity of the elements.
Radar mapping
Through the processor we can have a visual image of the results, which are mapped as a radar.
PSEUDO CODE
PROTOTYPE