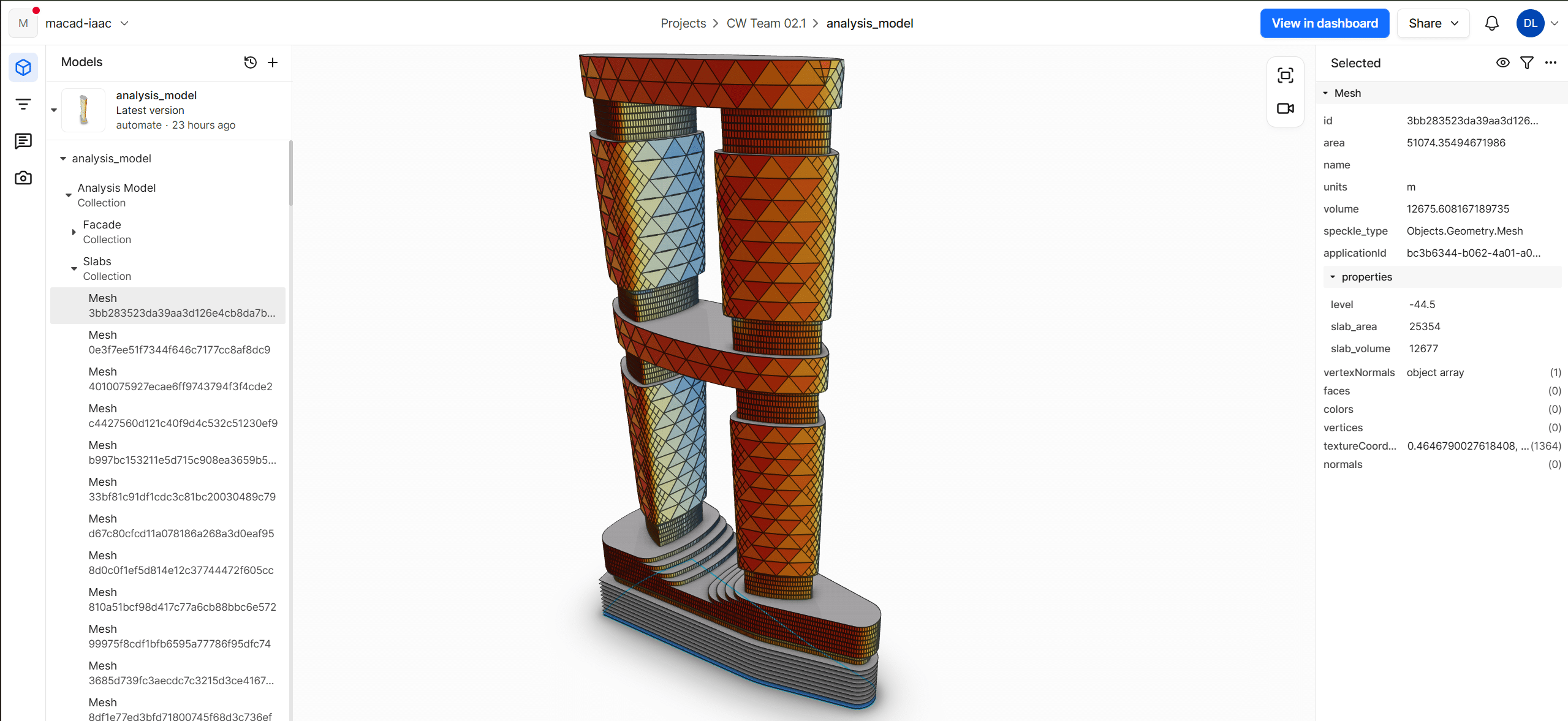
Smart Demolition: AI-Driven Construction Material Identification & Sorting System

The global construction industry currently faces a significant sustainability crisis, characterized by the massive generation of material waste that often bypasses recycling streams. This challenge stems primarily from a technological gap: the lack of real-time identification, sorting, and decision-making systems on active demolition sites. Without an efficient way to distinguish between various debris types, valuable … Read more