The purpose of the project was to create a simplified version of car parking technology
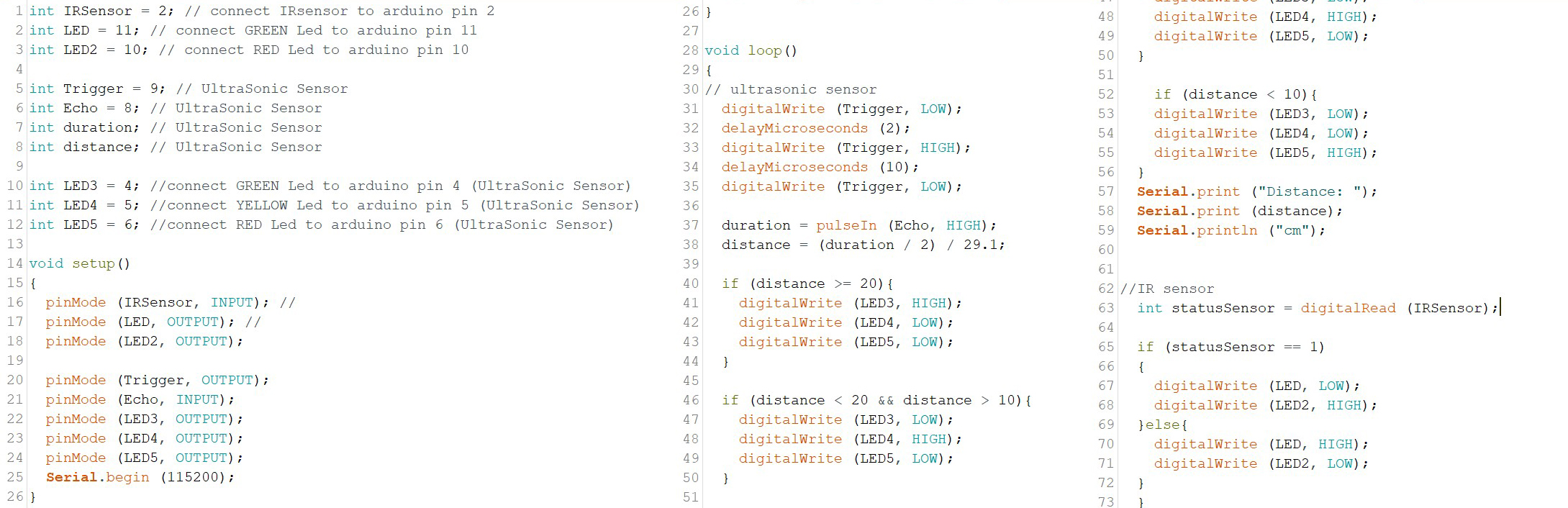
It is assumed that the sensors are located on both sides of the object (a car). On one side, the Ultrasonic Sensor HC-SR04 measures the distance to the collision object (for instance, a wall). The Output data is displayed on three LEDs: Green, Yellow and Red. The following conditions are introduced for the sensor: If the distance from the object to the sensor is more or equal to 20 cm, then the Green LED is on without interruption. If the distance is less than 20 cm, but more than 10 cm, the Yellow Led is on. If the distance is less than 10 cm, the Red LED illuminates.
On the other side of the object (a car) there is IR Sensor, in case another object (e.g., a person) suddenly appears. The Green LED in this case signals that the space around is free, the Red one indicates that another object (a person) is detected very close.
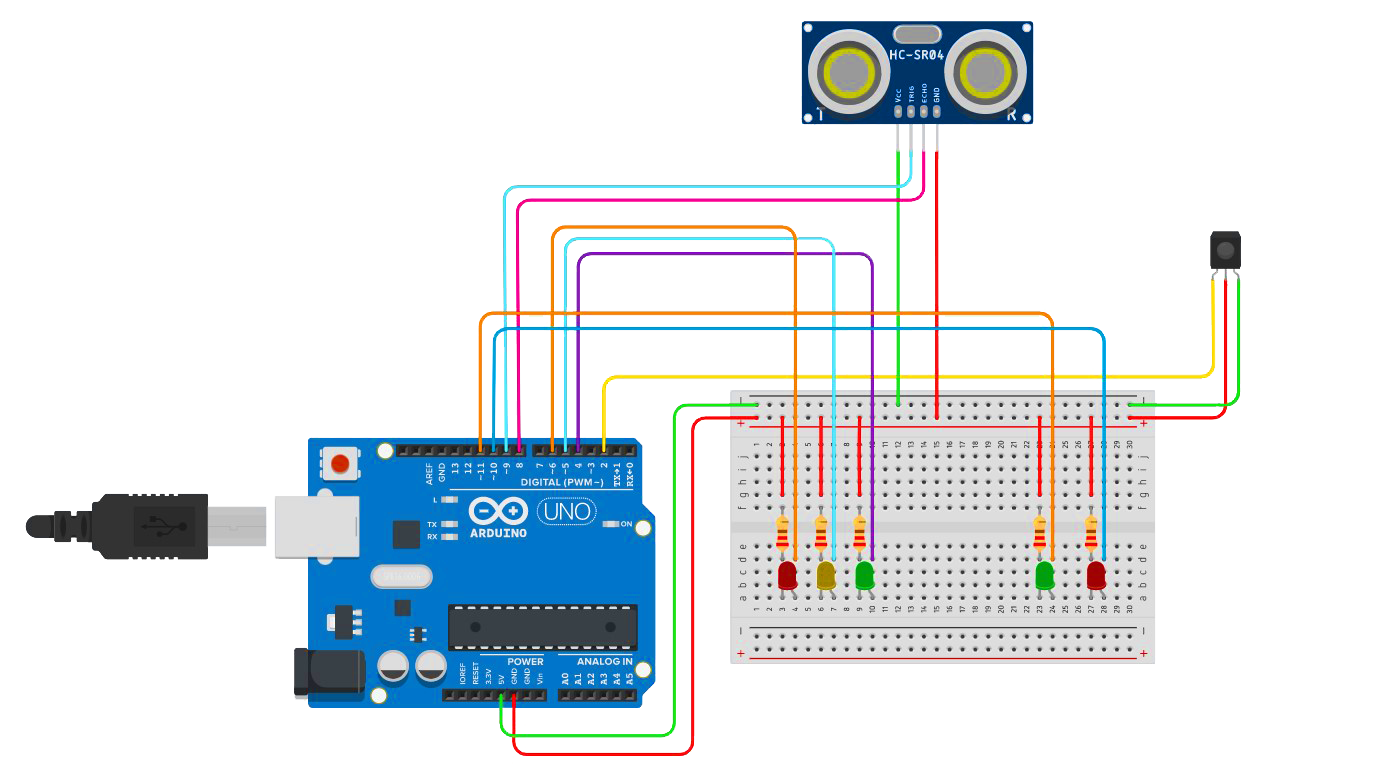
Components :
1. Arduino Uno
2. IR sensor
3. LED x 5 (5 mm)
4. Arduino cables
5. Jumper wires
6. Ultrasonic Sensor HC-SR04
7. Breadboard
8. Resistors (220 ohm)