
Robotic Coin Toss — Workshop Context
This project was developed within the framework of MRAC Workshop 2.1, a hands-on workshop focused on collaborative workflows and modular system development in robotics. The workshop emphasizes not only technical experimentation, but also the process of working as a team using shared digital tools, version control, and structured documentation.
As a case study, the workshop challenges students to translate a simple and familiar human action — a coin toss — into a robotic process. Using an industrial robotic arm, the project explores how motion, randomness, precision, and repeatability can be redefined when an everyday gesture is executed by a machine. What appears trivial for a human becomes a complex system involving mechanics, control, sensing, and analysis.
Rather than aiming for a perfect imitation of human behavior, the project investigates what new questions emerge when chance is produced by a robot. The robotic coin toss becomes a lens through which themes such as determinism, control, and uncertainty can be explored — both technically and conceptually — while reinforcing the importance of collaboration and system thinking in contemporary robotic practice.
MRAC01 (25/26): Workshop 2.1 – Robotic Coin Toss
This project is developed within the framework of MRAC Workshop 2.1: Team Collaborative Workflow and Modular System Development. The aim of the workshop is to learn, internalize, and apply collaborative software development practices using Git and GitHub while building a modular robotic system. The assigned task of this group is the design and implementation of a robotic coin toss using a robotic arm and a standard 2-euro coin, with a focus on system engineering, documentation, and reproducibility.
Overview
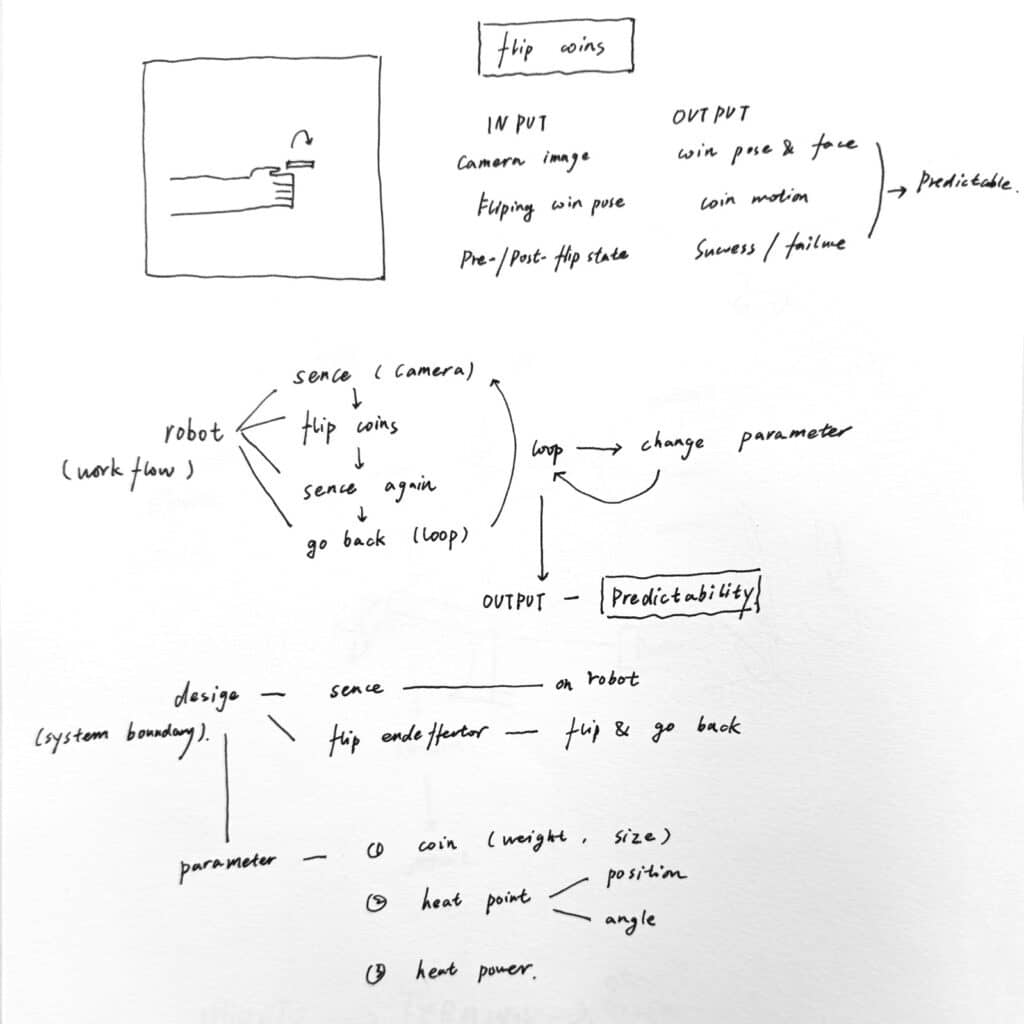
Although a coin toss is a simple human action, translating it into a robotic task reveals a complex system involving mechanics, kinematics, control logic, sensing, and repeatability. The project starts with an analysis of the human coin-toss motion, where the coin is balanced on the index finger at a slight inclination. The rotational motion is generated by elastic energy stored in the thumb and finger muscles, which is released to create vertical lift, forward impulse, and rotation. To maintain a mostly vertical trajectory, the release plane is subtly angled toward the body. Based on this analysis, several mechanical abstractions were explored, such as piston-based impulse systems and motor-driven ramp mechanisms. The project ultimately focuses on executing the task directly with a robotic arm, aligning with the workshop’s emphasis on robotic control, modular system design, and integration. A central question of the project is whether the system should prioritize randomness, as in a traditional coin toss, or controlled repeatability, which is intrinsic to robotic systems.

Getting Started
Concept Level
— What the system does and how it operates.
- Problem DefinitionDesign a robotic arm system that flips a coin through sensing, actuation, and closed-loop control, and estimates the probability of successful coin flipping.
- Operational WorkflowCamera detects coin position and face ↓ Controller decides flipping parameters ↓ Endeffector applies an impulse to the coin ↓ Camera re-detects coin face ↓ Flip probability is updated
- System Boundaries
- Robotic arm
- End-effector
- Vision sensor (camera)
- Control algorithms
System Level
— What functions the system must perform.
- Functional DecompositionSystem Functions:
- Detect coin position
- Detect coin face (heads/tails)
- Compute flipping parameters
- Apply impulse to the coin
- Re-detect coin state
- Compute flip probability
- Modify parameters between trials
- Input / Output DefinitionFunctionInputOutputSensingCamera imageCoin pose and faceFlippingCoin pose, parametersCoin motionEvaluationPre-/post-flip stateSuccess / failure
Subsystem / Component Level
- sense
- Detailed end-effector design
- parameter set
Market Analysis and Use Cases
Although the robotic coin toss originates from an experimental and academic context, the underlying system combines precise robotics, sensing, vision-based analysis, and repeatable motion control. These characteristics enable several potential applications beyond the laboratory environment. The following use cases are ordered according to their estimated monetary viability.
1. Live Event & Sports Entertainment (High Monetary Potential)
A robotic coin toss system can be integrated into sports events, such as football matches, e-sports tournaments, or televised competitions, where coin tosses are traditionally used to decide kickoff, side selection, or turn order.
By replacing a human-performed toss with a robotic system, the process gains:
- Transparency and perceived fairness
- Visual spectacle and technological appeal
- Integration with broadcast graphics and live data visualization
The system could be sponsored, branded, or customized for major events, creating direct revenue streams through licensing, sponsorship deals, and event rentals. Due to the large audience reach and commercial nature of sports events, this represents the highest monetization potential.
2. Interactive Exhibition & Trade Fair Installation (Medium–High Monetary Potential)
The robotic coin toss can function as an interactive installation at trade fairs, technology expos, or corporate showcases. Visitors could trigger the coin toss, observe the motion analysis in real time, and interact with visualized data such as trajectories, rotation speed, or probability distributions.
This use case is attractive for:
- Technology companies showcasing robotics, AI, or sensing systems
- Universities and research institutions presenting applied research
- Brand activations focused on innovation and interaction
Revenue potential arises through custom installations, short-term rentals, and commissioned builds, placing this use case in the medium-to-high monetary range.
3. Artistic and Cultural Installations (Medium Monetary Potential)
In an artistic context, the robotic coin toss can be interpreted as a commentary on chance, determinism, and control. By visualizing trajectories, biases, and outcomes, the system can question the notion of randomness in both human and machine decision-making.
Such installations could be displayed in:
- Museums
- Galleries
- Media art festivals
While direct monetization is typically lower than commercial events, funding can be obtained through grants, cultural institutions, and commissioned artworks, resulting in moderate monetary viability.
4. Research, Education, and Demonstration Platforms (Low–Medium Monetary Potential)
The system can be used as a teaching and research platform for robotics, computer vision, control systems, and experimental design. It provides a tangible example of how simple actions become complex when formalized and automated.
Potential users include:
- Universities and research labs
- Robotics courses and workshops
- Educational demonstrations
Monetization is mainly indirect, through educational funding, institutional budgets, or curriculum integration. While valuable academically, this use case has lower direct revenue potential.
5. Public Interaction & Urban Installations (Low Monetary Potential)
As a public-facing installation in urban spaces or science centers, the robotic coin toss could serve as an engaging interactive object. However, such installations typically prioritize accessibility and education over profit.
Funding would likely depend on:
- Public grants
- Municipal programs
- Non-profit initiatives
As a result, this use case ranks lowest in terms of direct monetary return.
Summary of Monetization Potential
- Live Sports & Event Entertainment — High
- Trade Fairs & Interactive Exhibitions — Medium–High
- Artistic & Cultural Installations — Medium
- Research & Education Platforms — Low–Medium
- Public & Urban Installations — Low
Experimental Test Setup
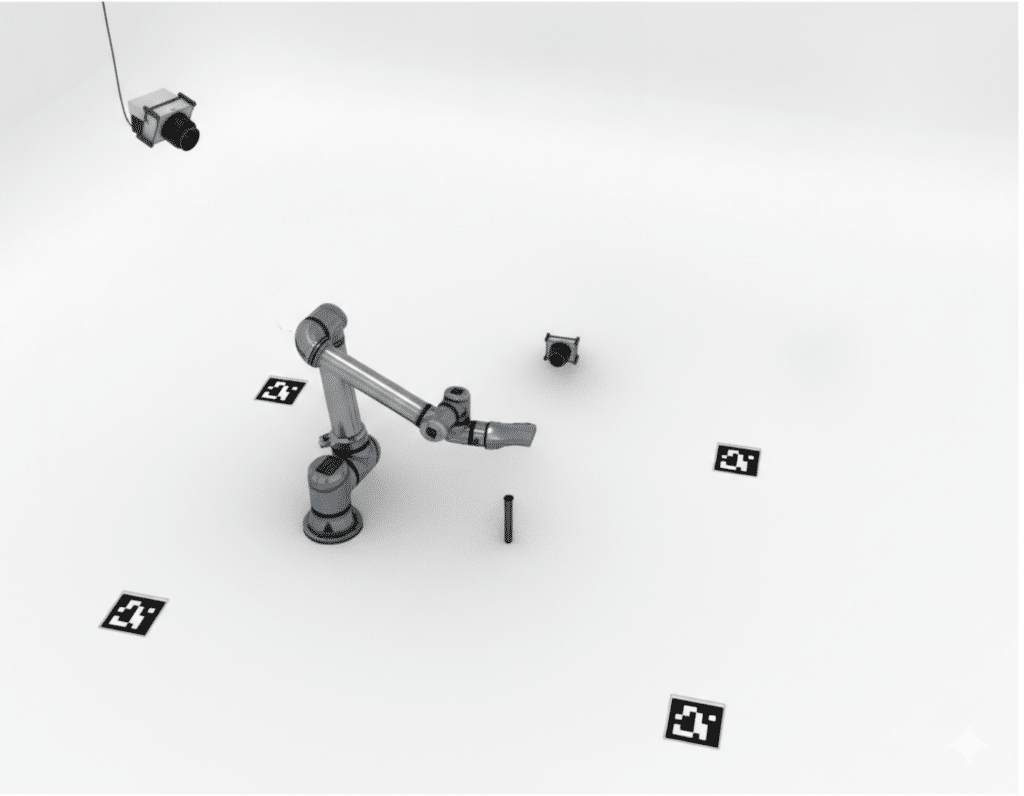
The experimental setup consists of an industrial robotic system designed to perform a controlled and repeatable coin toss. The core element of the setup is a UR10 robotic arm, equipped with a flat plate end-effector. Instead of grasping the coin during the toss, the end-effector generates an impulse from below, transferring linear momentum and inducing rotational motion in the coin.
The coin is always initialized at a fixed zero position, ensuring consistent initial conditions across trials. After each toss, the coin is returned to this reference position using a suction cup mechanism mounted on the robotic arm. This guarantees repeatability and allows sequential experiments without manual intervention.
To synchronize the physical interaction with the control logic, the system relies on digital I/O signals. These signals are triggered during the pickup and release phases of the coin, enabling precise timing control and state tracking within the robotic program.
To analyze the motion and trajectory of the coin, the setup incorporates two camera systems:
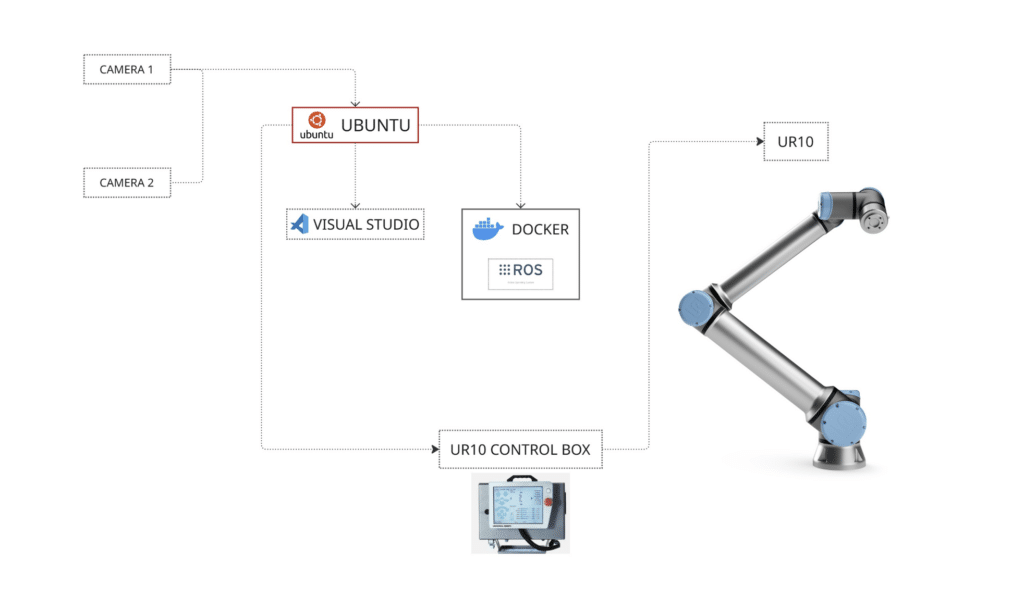
- Global Cell Camera
The first camera observes the entire robotic cell. The workspace is defined using four ArUco markers, which allow the camera to estimate its pose and track the relative position of the robot and coin within a calibrated coordinate system. This camera provides spatial context and supports system-level motion analysis. - Trajectory Analysis Camera
The second camera is positioned laterally relative to the coin’s motion. It focuses directly on the coin during the toss. In the background, a black-and-white striped pattern is used to enhance visual contrast and facilitate trajectory extraction, rotation estimation, and motion tracking through image processing techniques.
Together, the robotic arm, suction-based reset mechanism, synchronized I/O control, and dual-camera vision system form a closed experimental setup. This configuration enables controlled coin tossing, repeatable initialization, and detailed motion analysis, serving as a foundation for further investigation into trajectory behavior, repeatability, and potential learning-based optimization.
Prerequisites
Ensure that you fulfill the following criteria to replicate this project.
- Ubuntu LTS 20.04 <
- Python 3.7 <
- Docker
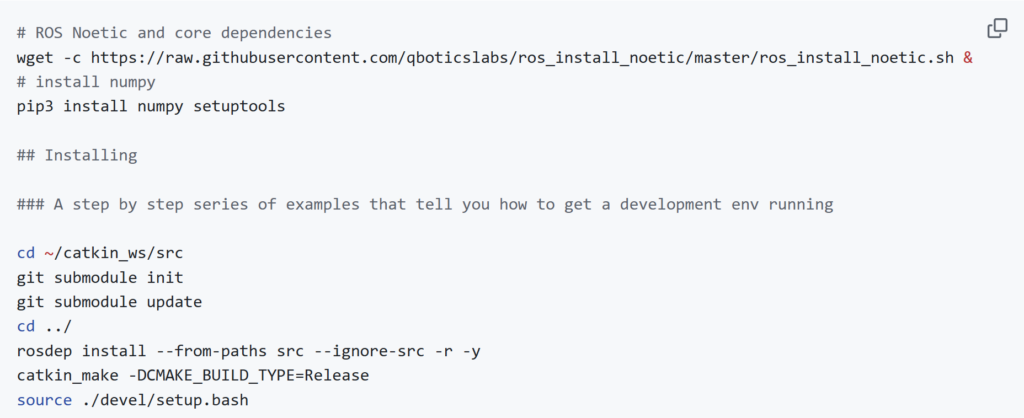
Depencies
The project’s dependencies include:
- Numpy – for numerical and matrix operations
- OpenCV – for image processing and visual analysis
- ROS – for robot control, communication, and system integration
The dependencies are satisfied using the following sources:
Deployment
Add additional notes about how to deploy this on a live system
Run the application with .docker/run_user_nvidia.sh
Ensure that you are running the indicate command sudo chmod -R <user_name> \dev_ws for permitions
Run terminator
Demo
Python-Based Coin Toss Logic Demo
In addition to the physical robotic setup, this repository includes a lightweight Python-based demo that conceptually simulates the logic of the coin-toss system. This demo is intended as an abstract representation of the sensing–decision–actuation loop used in the robotic implementation.
The demo is composed of several modular Python scripts, each representing a subsystem of the robotic architecture:
- coin_flip.py
Acts as the world state and control loop. It maintains whether the coin is at its origin position and orchestrates the system behavior. - coinFliping.py
Simulates the physical randomness of the coin toss by generating a random coin face (headsortails). - camera.py
Represents a vision sensor responsible for detecting the coin face after the toss. - camara2.py
Simulates a second vision sensor that detects the spatial position of the coin in the workspace by generating random(x, y)coordinates.
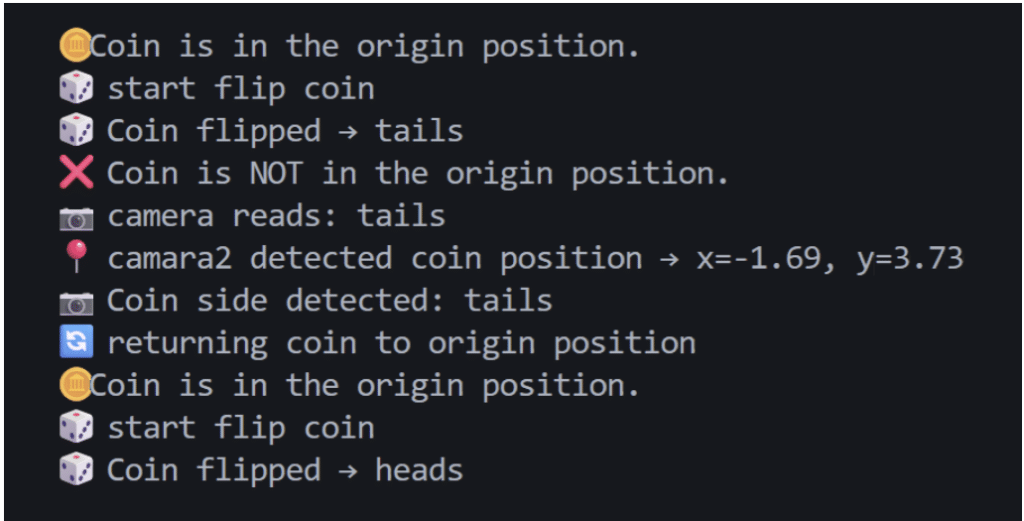
Demo Workflow
The execution loop follows this sequence:
- The system checks whether the coin is at its origin position.
- If the coin is at the origin, the controller triggers a coin flip.
- The coin face is randomly generated to simulate physical uncertainty.
- Once the coin is no longer at the origin, the vision modules are activated:
- One camera detects the coin face.
- A second camera detects the coin position in space.
- After sensing, the coin is programmatically returned to its origin position.
- The loop repeats, enabling continuous trials.
This Python demo mirrors the structure of the full robotic system by clearly separating:
- Sensing
- Decision-making
- Actuation
- State management
Although simplified, this abstraction reflects the same architectural principles used in the robotic implementation, such as modularity, closed-loop control, and system-level coordination. The demo serves as a conceptual and educational tool to understand how a seemingly simple action—like a coin toss—requires structured logic and subsystem integration when executed by a robotic system.
Authors
Leo – Repository management, structure, documentation, system overview
Jenni – Development of the coin-toss mechanism
Max – Research on coin dynamics, sensing strategies, and motion analysis
Natalia – Theoretical research, precedents, and mathematical modeling
References
K. Albee et al., “A robust observation, planning, and control pipeline for autonomous rendezvous with tumbling targets,” Frontiers in Robotics and AI, vol. 8, p. 234, 2021, doi: 10.3389/frobt.2021.641338.
Credits
Leo, Jenni, Max, Natalia – Concept development, research, implementation, and documentation
Acknowledgements
Creation of GitHub template: Marita Georganta – Robotic Sensing Expert
Creation of MRAC-IAAC GitHub Structure: Huanyu Li – Robotic Researcher
https://github.com/leonardelaisboker-lab/Workshop2.1-Group-2
