
From Intuitive Stone Stacking to Rule-Based Robotic Assembly
Introduction
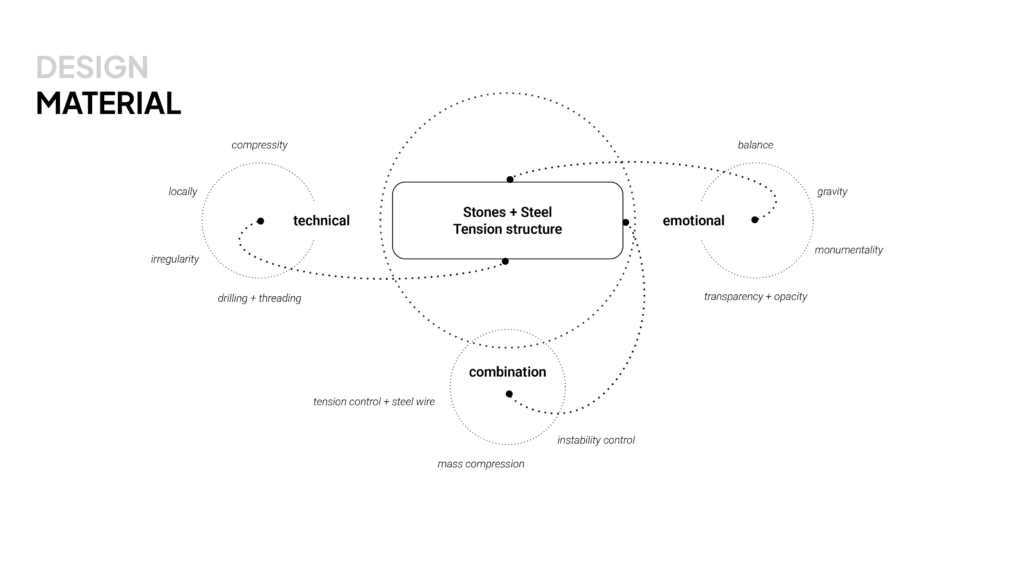
Computing Balance explores how the intuitive act of stone balancing can be translated into a computational construction system. Instead of treating balance as a visual effect, we approached it as a structural rule. Each stone is evaluated by its size, orientation, contact surface, center of mass, and relationship to a steel wire system.
The project was developed during the SCALExD workshop From Matter to Model: Materials Intelligence, which focused on the intersection of material behavior, computational design, scanning, and robotic fabrication. The workshop encouraged participants to move continuously between physical matter and digital workflows, using material intelligence as a driver for design decisions.
Workshop Context
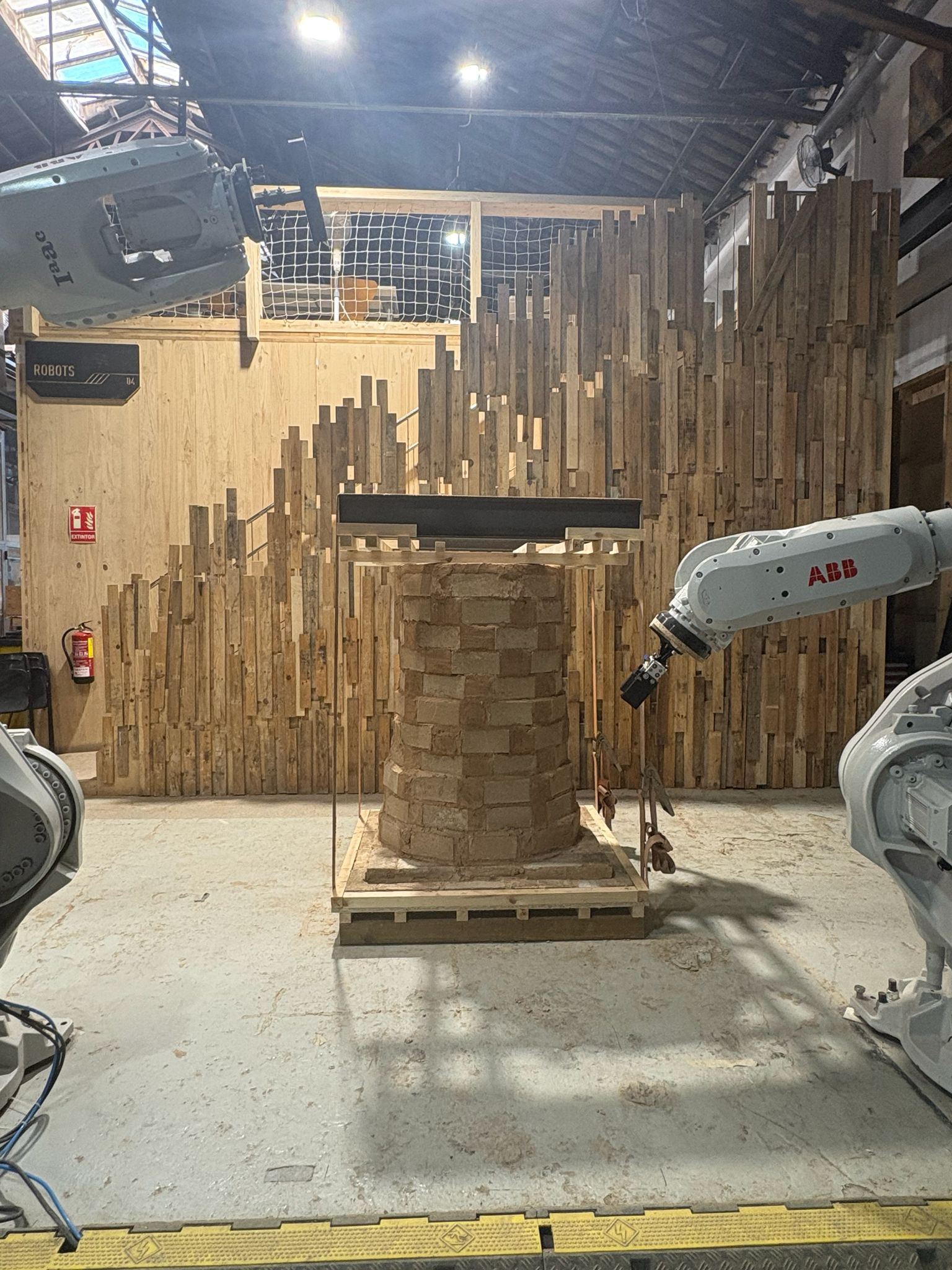
Alongside individual design proposals, the workshop included a shared robotic proof of concept. This was not our team’s concept, but a common exercise for all groups to test the SCALExD workflow through robotic construction.
In this shared setup, one robot applied mortar while another robot placed bricks. A Photoneo vision system detected object positions, Python acted as the orchestrator, Grasshopper generated and validated toolpaths, and PRC dispatched the motion commands to the ABB robot system. This created a closed loop between sensing, computation, and robotic action.
Our Proposal
Using this framework, our group asked a different question:
Can stone balancing become a computational assembly logic?
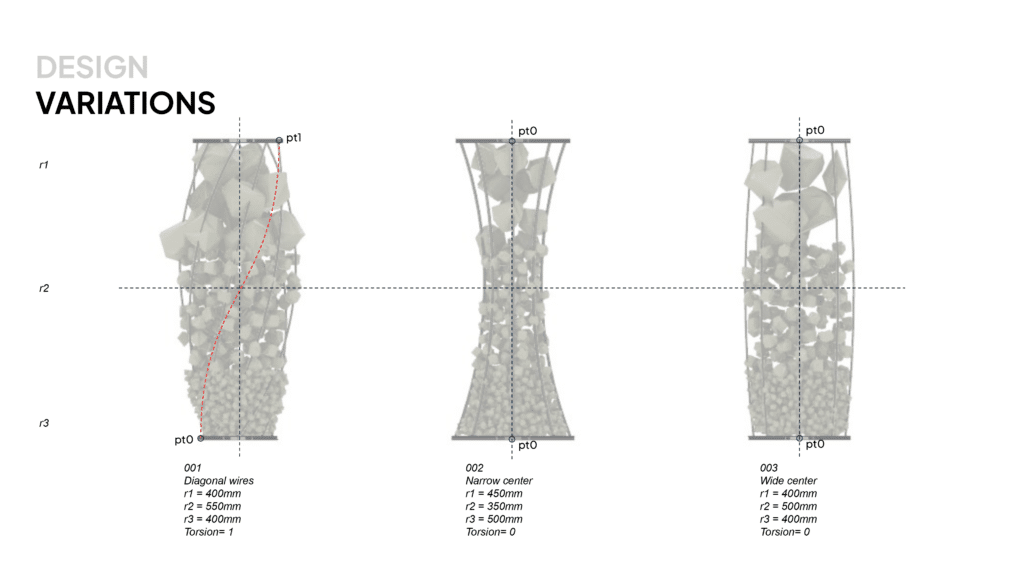
Rather than stacking stones randomly, we proposed a column system in which each stone is scanned and digitally checked before placement. The balance logic is based on three main criteria:
- center of mass
- contact polygon
- cable confinement
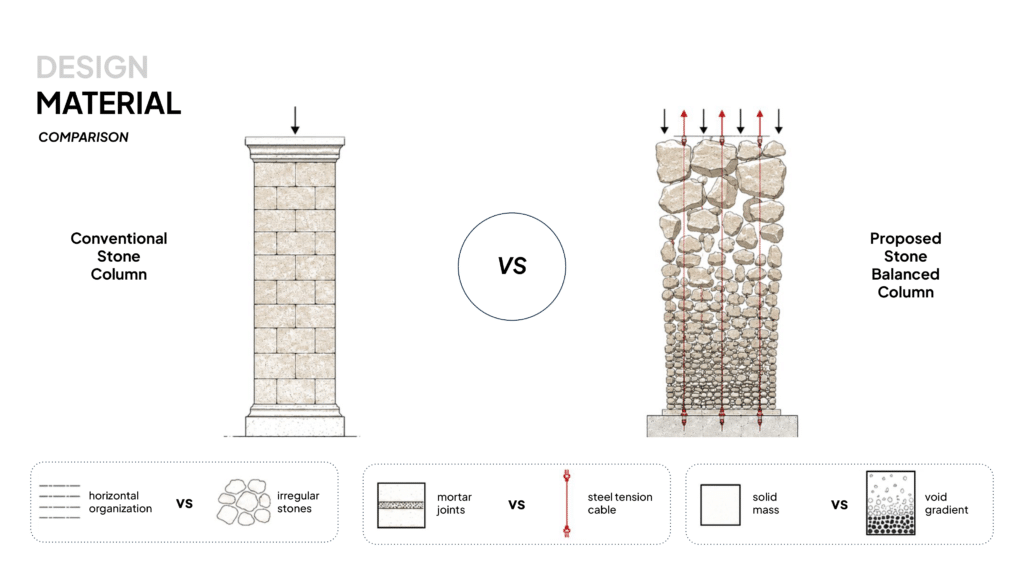
If the vertical projection of the stone’s center of mass falls inside the support polygon below, the stone is accepted. If not, it is rotated, shifted, or rejected. Steel wires provide additional confinement and vertical continuity, allowing the column to work as a hybrid system of compression and tension.
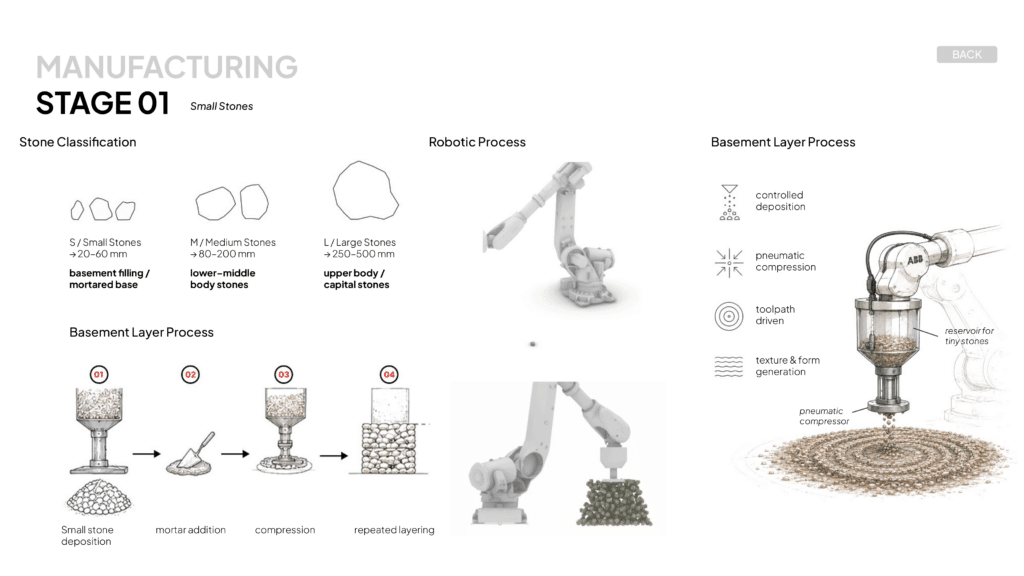
Stage 01 – Small Stones
The first stage focuses on the formation of the basement layer using small stones. Stones are classified by size, and the smallest category is used to create a dense mortared base.
The process follows four main steps:
- small stone deposition
- mortar addition
- compression
- repeated layering
This stage establishes the stable lower part of the column. A robotic end effector deposits the small stones in a controlled way, mortar is added, and the material is compressed through a toolpath-driven action. The result is a compact base that supports the upper structure.
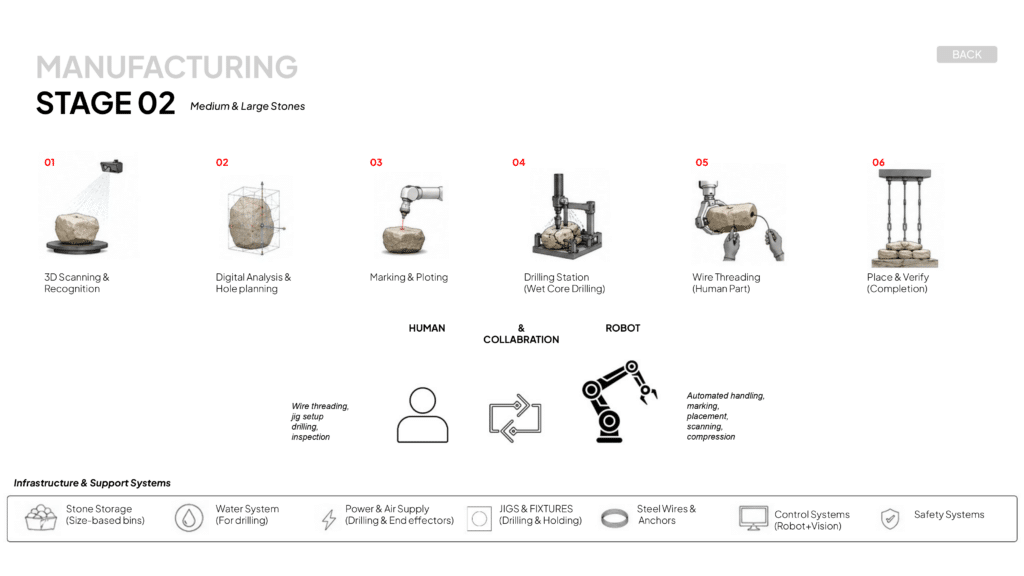
Stage 02 – Medium & Large Stones
The second stage works with medium and large stones, which form the main body and upper part of the column. Here the workflow becomes more precise and selective.
The process includes:
- 3D scanning and recognition
- digital analysis and hole planning
- marking and plotting
- drilling preparation
- wire threading
- placement and verification
At this stage, human and robot collaboration becomes essential. The robot handles scanning, marking, positioning, and automated handling, while the human contributes through wire threading, jig setup, drilling assistance, and inspection. This creates a hybrid workflow where robotic precision and manual adaptation work together.
Digital Workflow
Each stone is scanned and converted into a digital mesh. From this mesh, we extract geometric and structural information such as:
- volume
- center of mass
- possible contact surfaces
- drilling axes
- safe gripping zones
These parameters inform the placement decision. Kangaroo can be used as an iterative physics check for local balancing behavior, while Karamba can support the evaluation of the overall structural logic, including cable forces and global stability.
The intention is not to remove uncertainty, but to make irregularity computationally manageable.
Reflection
Computing Balance proposes a shift from stone balancing as an intuitive craft act to stone balancing as a rule-based construction logic.
The shared workshop proof of concept demonstrated how sensing, computation, and robotic action can be coordinated through a multi-agent workflow. Our proposal extends that logic into a speculative architectural system, where irregular stones, steel wires, and robotic evaluation work together to form a column.
In this project, balance is no longer just an image.
It becomes a protocol.
Credits
Project developed during SCALExD Workshop 02 From Matter to Model: Materials Intelligence, hosted at the Institute for Advanced Architecture of Catalonia (IAAC). The workshop explored interdisciplinary collaboration, digital design and fabrication, prototyping, and the interaction between virtual and physical workflows.
Project Team:
Onur Berk Doğrultucu, Natalia Alvarez, Friderike Schmidt, Arthur Rotstein, Maximiliano Castilov
Faculty and Tutors:
Johannes Braumann, Martin Schwab, Marta Rota, Alexandre Dubor, Pit Siebenaler, Valeria Carrion

