
Objective.
Over three weeks, the teams develop a process to create a painting using a robot with a paintbrush, studying the brushstroke, paint properties, and the relationship between human gesture and machine movement. We began by working manually, then incorporated digital work and the robot. The final A2 painting reflected the robot’s anatomy and how its movements influenced the artwork. We also created a digital vector drawing of the painting’s path, which was presented alongside the painting in a final pin-up.
The work was completed in the following steps:
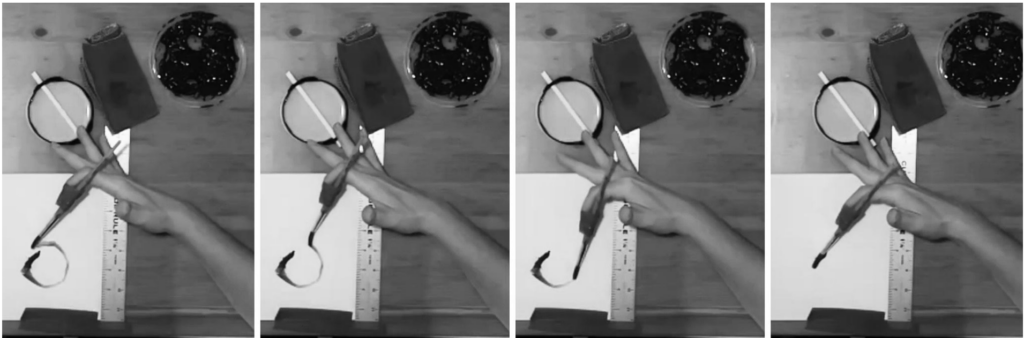
- Analyze hand gestures.
- Observe similarities and differences between the hand and the robot.
- 3d model trajectories.
- Program simple trajectories on the robot.
- Develop a scientific approach to using a paint brush.
- Make a conceptual exercise of translating a movement into a painted stroke.
Deliverables.
The investigation yeilds a series of deliverables– first, paintings created by hand using black paint, followed by robot-made catalogue showcasing the robot’s own stroke patterns. This is mirrored in a vector drawing, depicting the movement of a robot as a diagram. The project culminates in a short film showing the movement and process of the other physical deliverables.
Processes.
01. Hand Paintings
Manual marks made form paint to paper yeilded a variety of brush directions, pressures, and speed with varied paint viscosity.
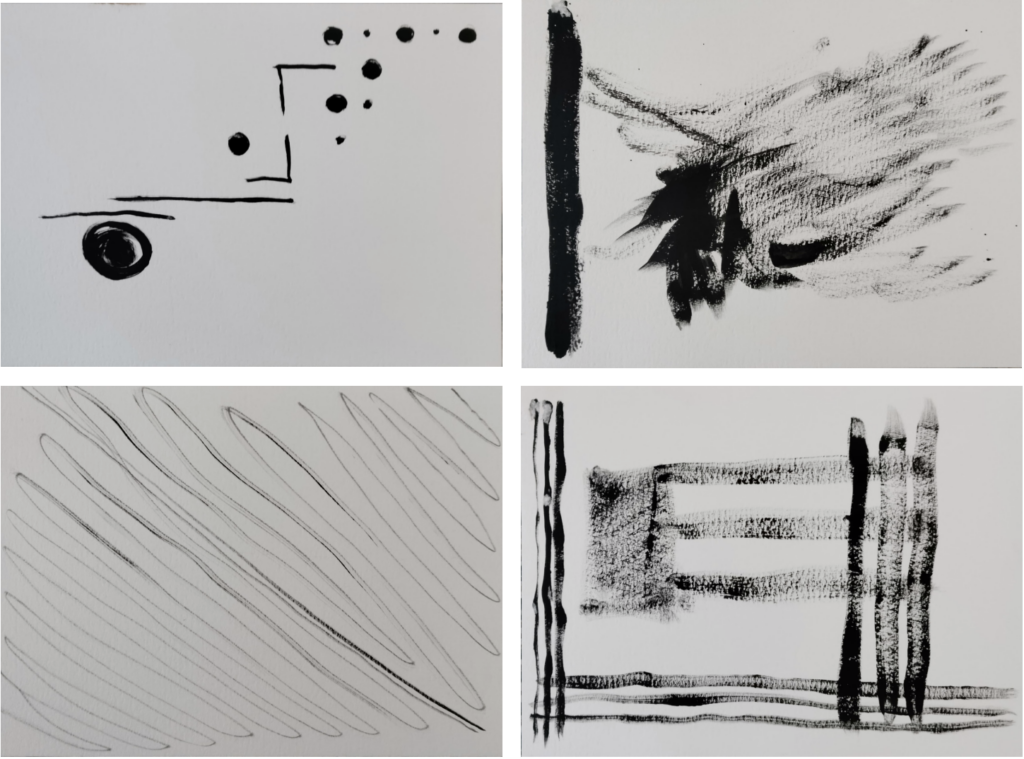
Movements of the hand and brush were broken down into simple vectors and abstracted in plan and section.
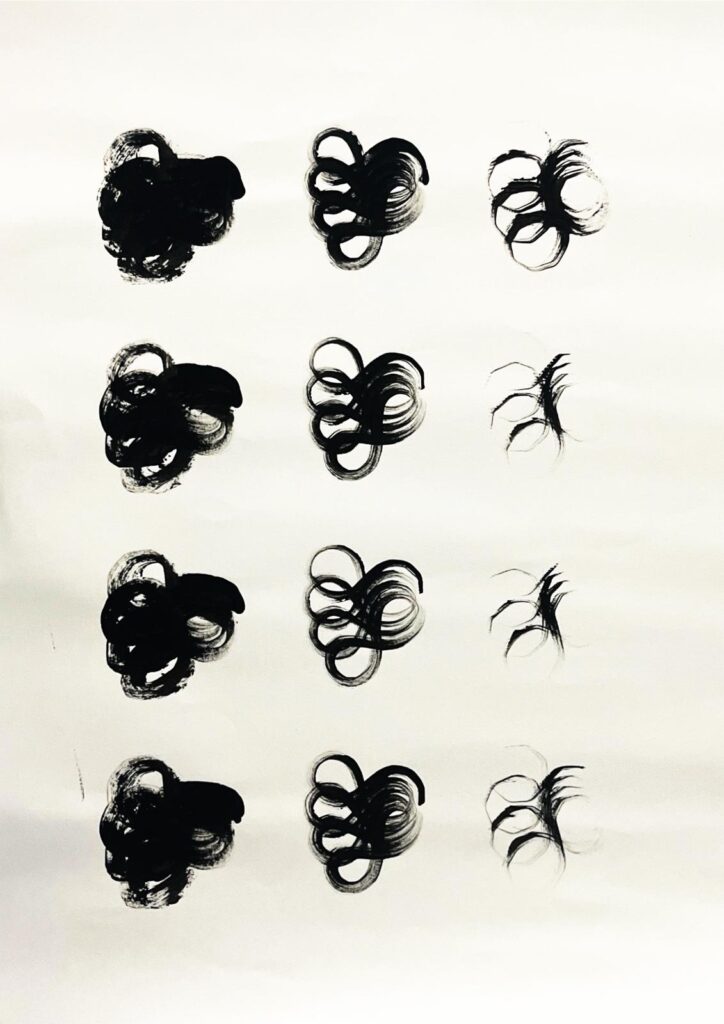
02. Robot Painting
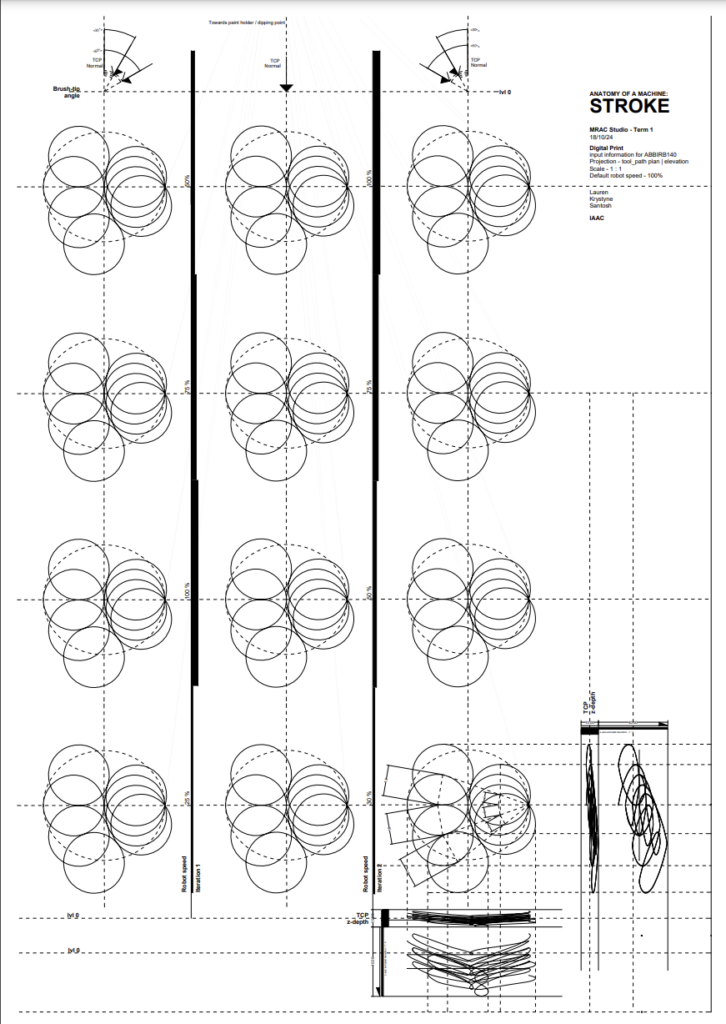
Using Grasshopper for Rhino software, a stroke toolpath is programmed and replicated over a cartesian plane. Variables like brush angles, pressures, and speeds are then plotted graphically to show variation in the mark made or robotic output.
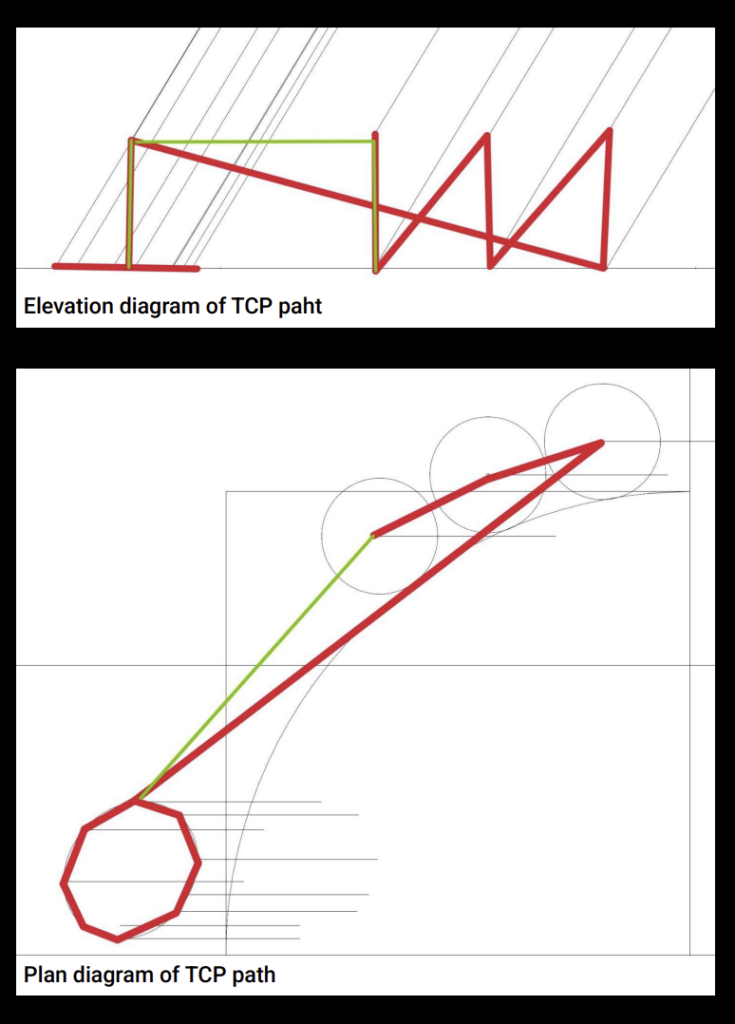
03. Vector Drawing
The vector drawings reflects the toolpath input into the robot that yeilded the aforenoted painting. While the brush angle varied from left to right, the speed of the stroke varied from top to bottom.
04. Video of Process
Conclusion.
When comparing the vector drawing input to the robotic output, the variables– speed, brush angle, and brush pressure– are clearly decipherable, alluding that these motions that are somewhat instinctive or impulsive in a human, can be controlled in a robot.
