
Introduction
The Anatomy of a Machine: Stroke project explores the dialogue between human and robotic motion through painting. Conducted during the first MRAC studio, the exercise investigates how the physical behavior of paint, brush, and hand movement can be translated into robotic articulation.
Over three weeks, we studied the anatomy of a brushstroke — first through manual experiments, then by programming robotic trajectories using ABB robots. The final outcomes include a series of human-made and robot-made paintings, a vectorial drawing, and short film documentation showcasing the evolution of gesture from analogue to robotic form.
Objective
Understand the anatomy of the hand-drawn brushstroke and its transformation into a robotic gesture.
During the first phase of the project, we examined the essence of a paintbrush stroke — the flexibility of the bristles, viscosity of the paint, and the dynamics of hand motion.
We analyzed the connection between gesture and stroke, studying how pressure, direction, and repetition influence the painted outcome. These observations later informed the robotic movements that mimic and reinterpret human motion.
Phase 1 – Manual Stroke Studies
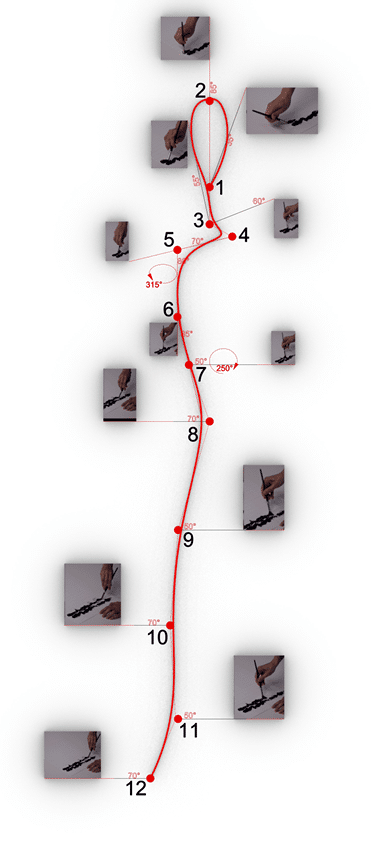
We began with an analytical exploration of hand-drawn brushstrokes using black acrylic paint on white paper. Each test explored a different variable—pressure, rhythm, stroke length, and paint reload frequency.
Image Set 1 – Brushstroke Gestures
These images document early gesture exploration. The strokes vary from circular spirals to geometric grids and oscillating wave-like lines. They reveal how speed, angle, and paint load affect the stroke’s continuity and edge quality
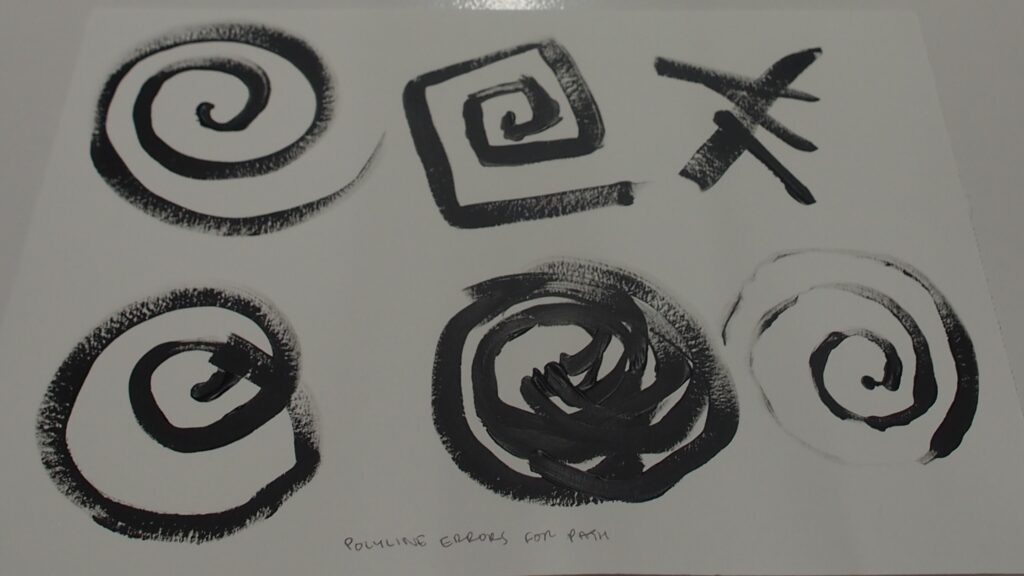





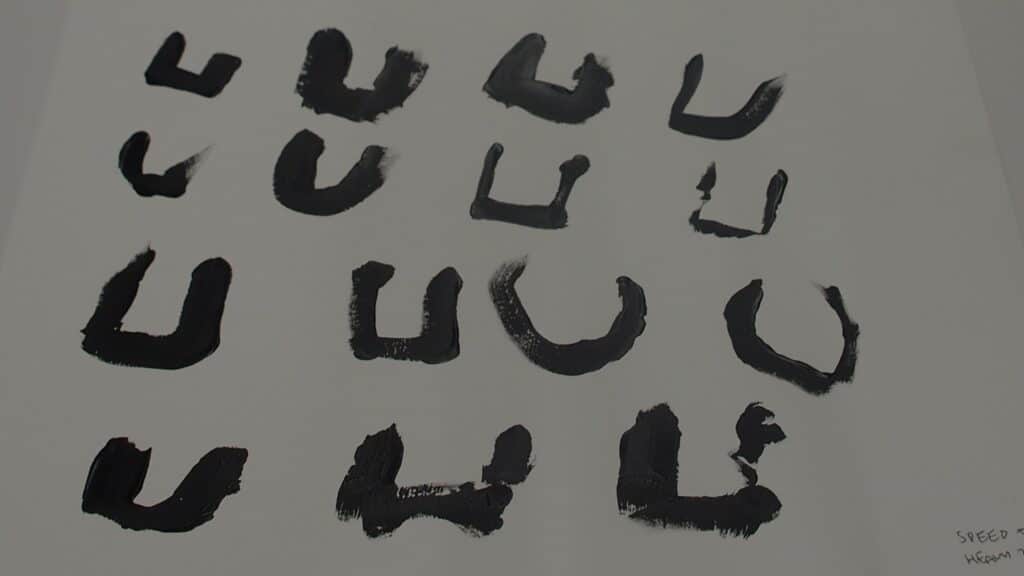
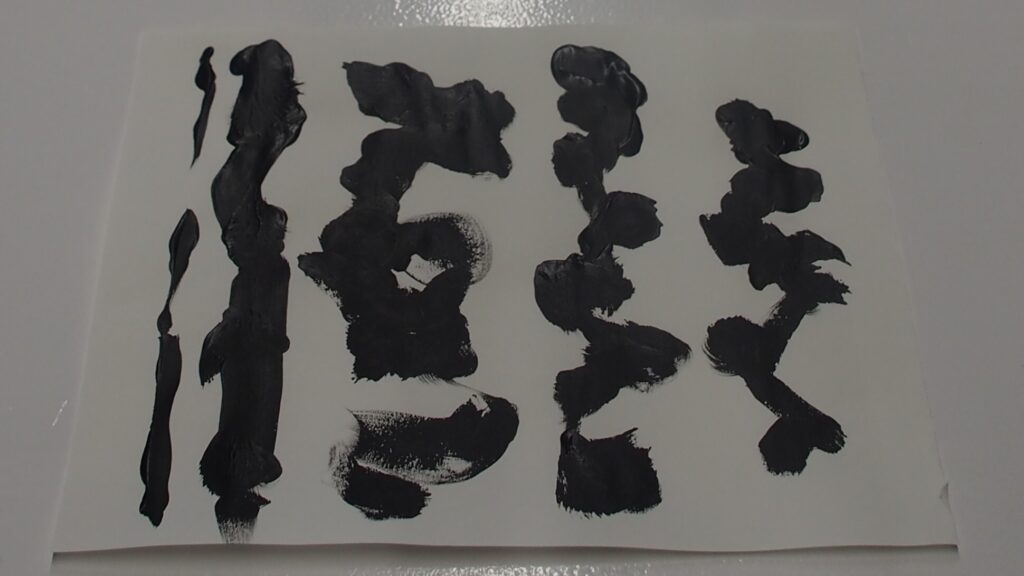


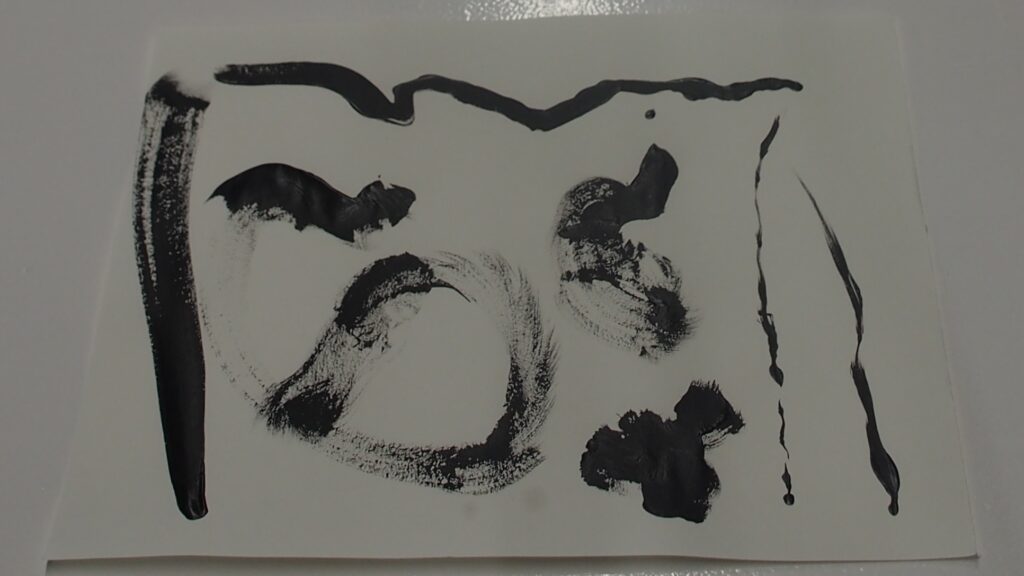

Key observations:
- Circular strokes created stronger tonal gradients due to rotational pressure buildup
- Long, linear strokes reveal brush drag and the point of paint depletion
- Repetitive strokes produce visible rhythmic texture patterns
Phase 2 – Robotic Setup and Painting
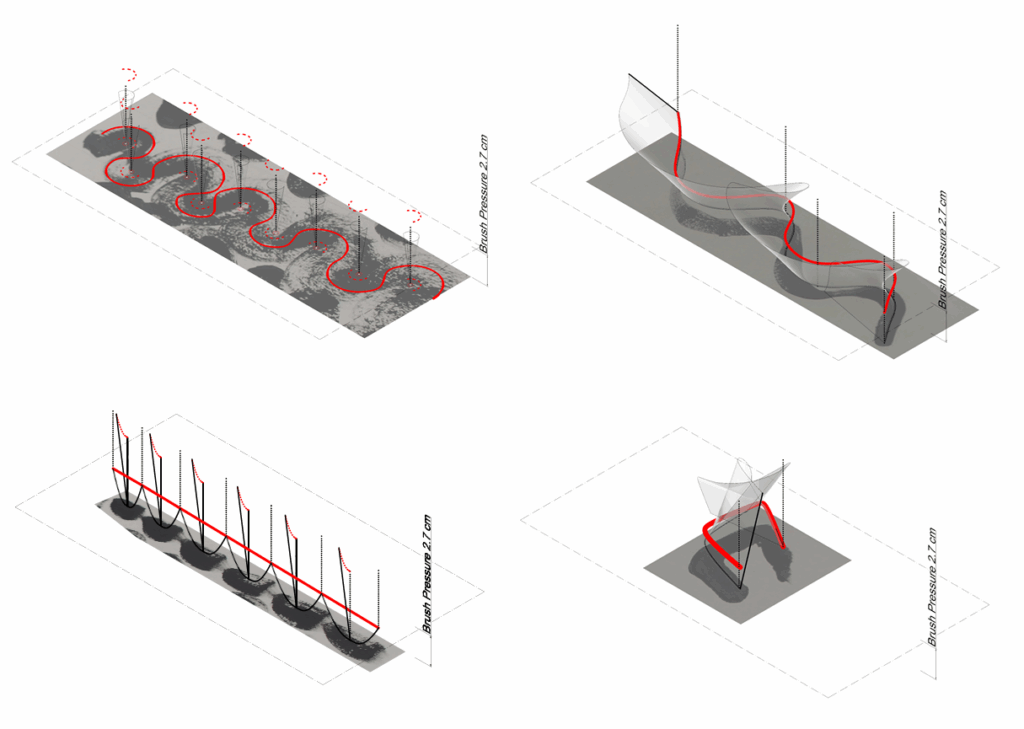
The painting trajectories were executed using an ABB IRB 120 robotic arm, equipped with a custom paintbrush holder. We programmed the trajectories in Grasshopper using ABB’s robot simulation plugin.
Two short clips capture the robot performing continuous wavelike motion, replicating the stroke’s rhythm and curvature. The tests demonstrate how robotic precision can reinterpret the organic variability of a human gesture.
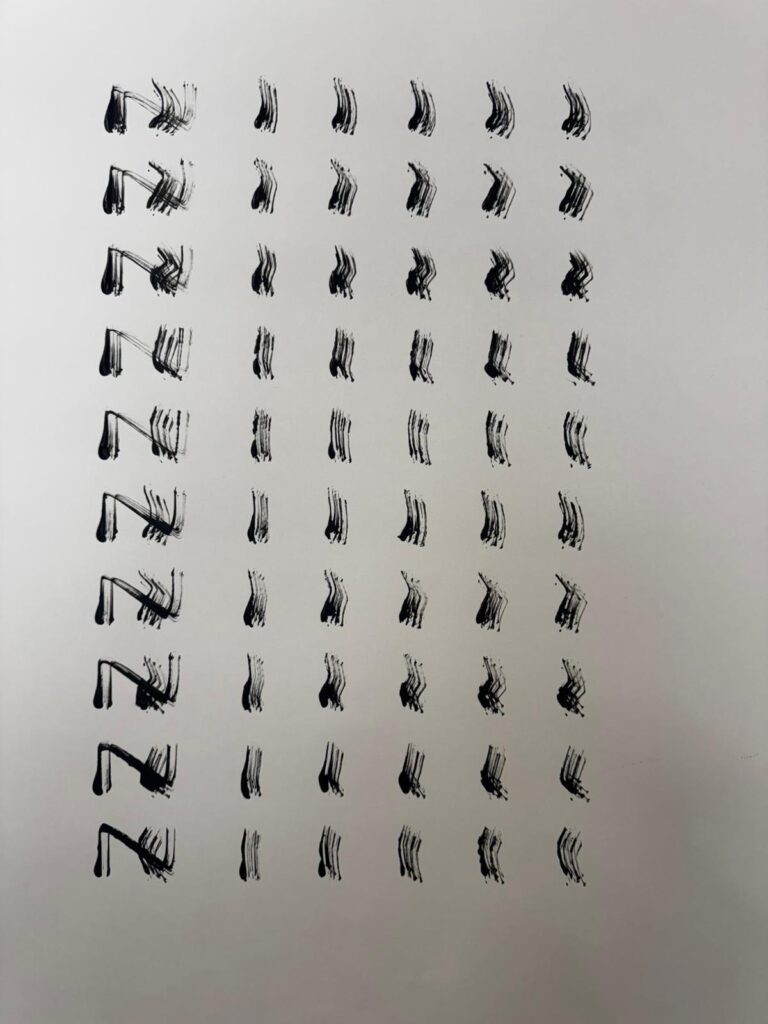
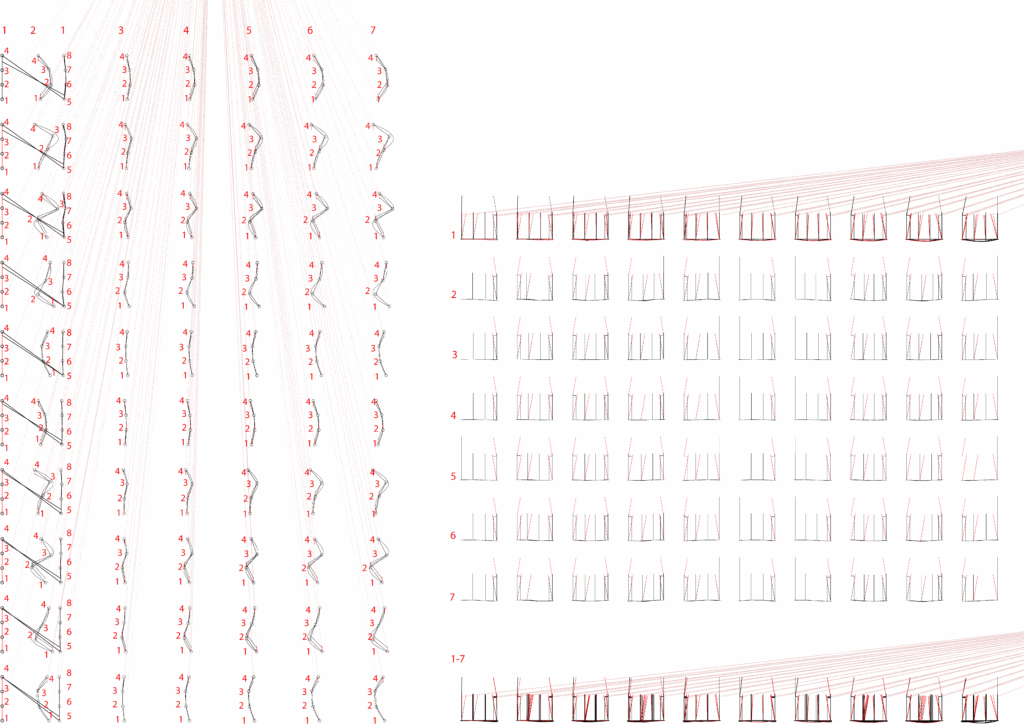
The final test involved creating a systematic 10×6 stroke grid to analyze robotic precision, repetition, and micro-variation over time. Each stroke shares the same trajectory but differs slightly in pressure, creating a field of subtle deviations.
Reflection
Through the process of translation from hand to robot we observed how intuitive, emotional gestures transform into systematic mechanical movements. The resulting works highlight the precision and imperfection coexisting within both the human and robotic domains.
