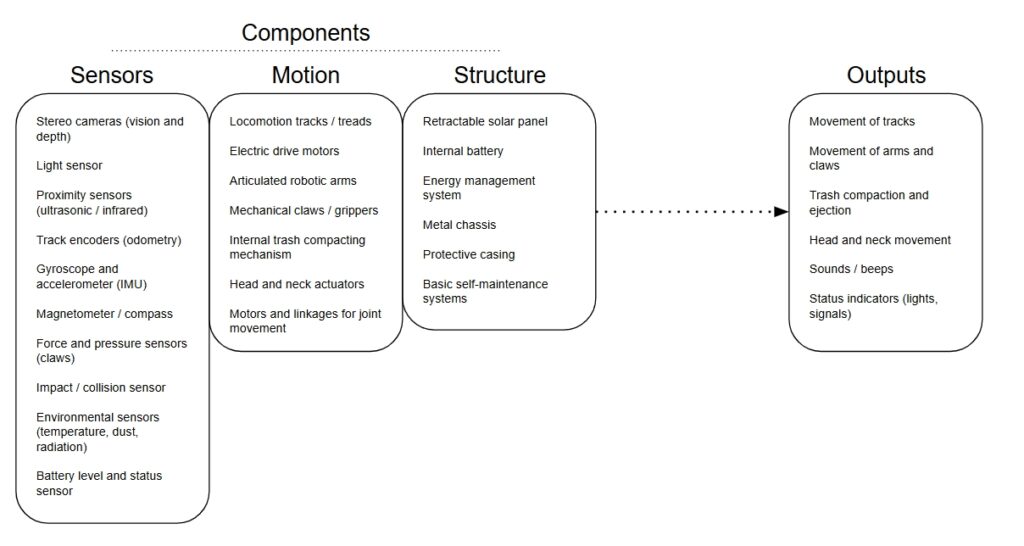
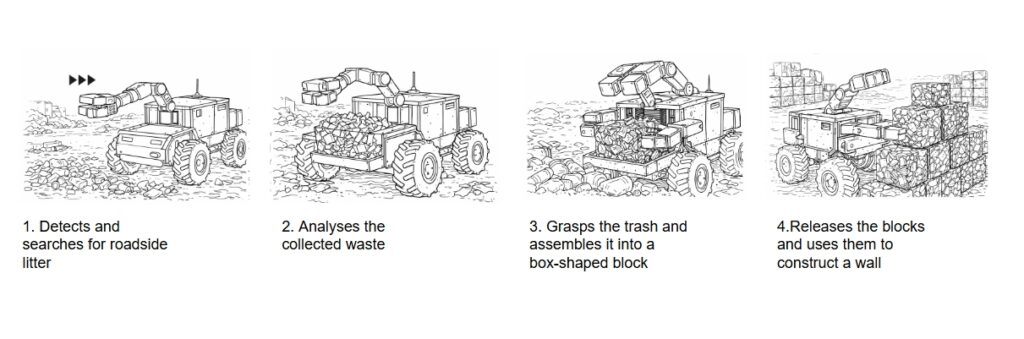
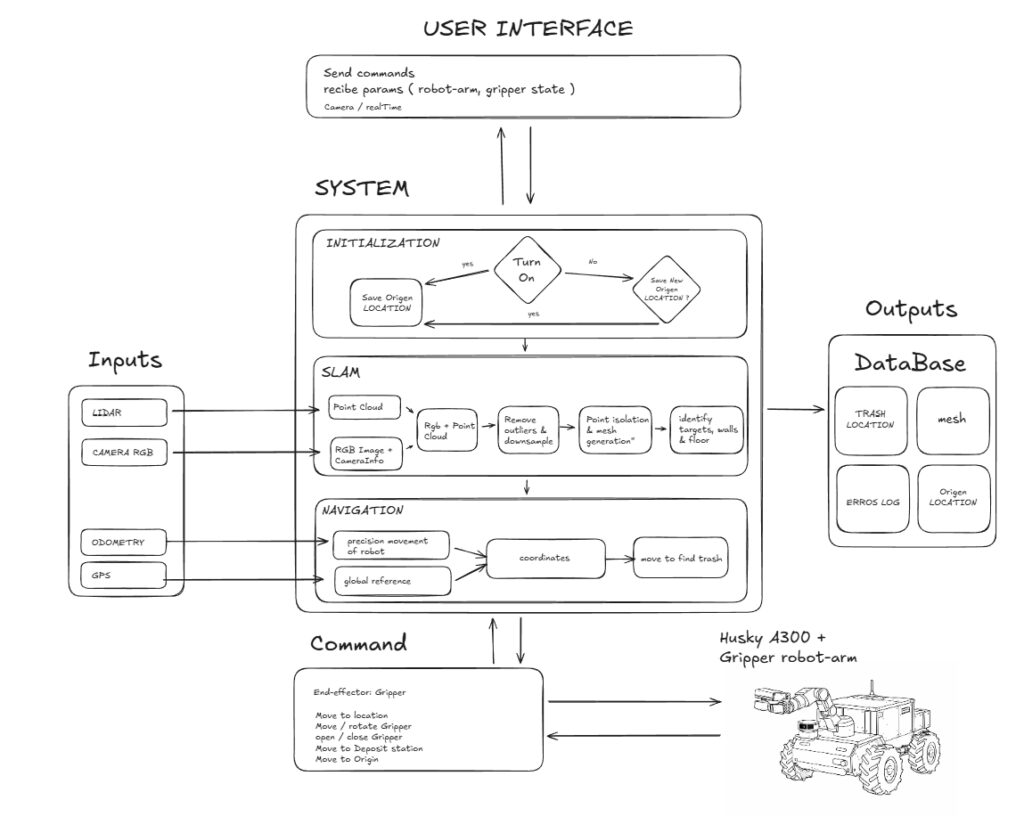
Team member(s): YUNGHSUAN LIN, Maximiliano Castillo Milla and Arthur Rotstein Modified by YUNGHSUAN LIN on February 9, 2026 How can robots reach trash and recycle it? What components are we using? What is the system process? Main system