
Introduction
Can centuries-old vernacular intelligence inform the future of robotic construction? Willow Protocols is a research project developed at the Institute for Advanced Architecture of Catalonia (IAAC) that bridges traditional Catalan basketry techniques with advanced robotic fabrication. By re-evaluating historical construction methods like Zarzo and Wattle and Daub, this project proposes a highly sustainable, hyper-local architectural system driven by material behavior and human-robot collaboration.
The Source: Living Heritage & 0-KM Ecology
The foundation of this research is deeply rooted in socio-cultural ecology. We utilize willow (Salix), a fast-growing, highly renewable biomass sourced directly from Finca Fitor in the Gavarres Massif. By employing a carbon-negative harvest strategy that clears undergrowth to prevent wildfires, we established a strict “0-KM Material” workflow. This approach not only minimizes the carbon footprint associated with transportation but also reconnects Barcelona’s technological innovation with regional riverbank ecosystems. Furthermore, the project honors the living heritage of the region, drawing inspiration from the deep-rooted craft celebrated annually at the Fira Internacional del Cistell de Salt.

The lineage: Cestery Techniques & Tools



Vernacular Tectonics: Zarzo & Wattle and Daub

To understand the future of bio-based robotic construction, we must first look at its lineage. Our research draws direct inspiration from “Vernacular Tectonics,” specifically focusing on the ancient structural logic of Zarzo and Wattle and Daub. These historical methods demonstrate a profound understanding of material behavior that pre-dates modern industrial standardization.
- The Zarzo (The Tensile Skeleton): Historically used for lightweight boundaries and agricultural structures, the Zarzo is a traditional woven matrix. It relies entirely on the natural flexibility and friction-locking capacity of raw biomass, such as willow rods. By weaving continuous fibers over and under vertical guides, it creates a rigid framework without the need for metallic fasteners. In our system, the Zarzo acts as the primary tensile structure.
- Wattle and Daub (The Composite Monolith): Building upon the woven framework, Wattle and Daub is one of the oldest composite building techniques in human history. The “daub” (a stabilized earth mixture usually containing clay, sand, and natural fibers) is pressed directly into the woven “wattle.” The two materials work in perfect structural symbiosis: the woven willow provides the tensile strength needed to resist bending and prevent the earth from cracking, while the earthen daub provides compressive strength, thermal mass, and spatial enclosure.
By digitizing these traditional methodologies, our project aims to translate the tacit knowledge of vernacular builders into a programmable fabrication system. We are not just preserving a craft; we are using its structural logic as the foundation for a highly sustainable, contemporary architectural system.
The System: Weaving Techniques
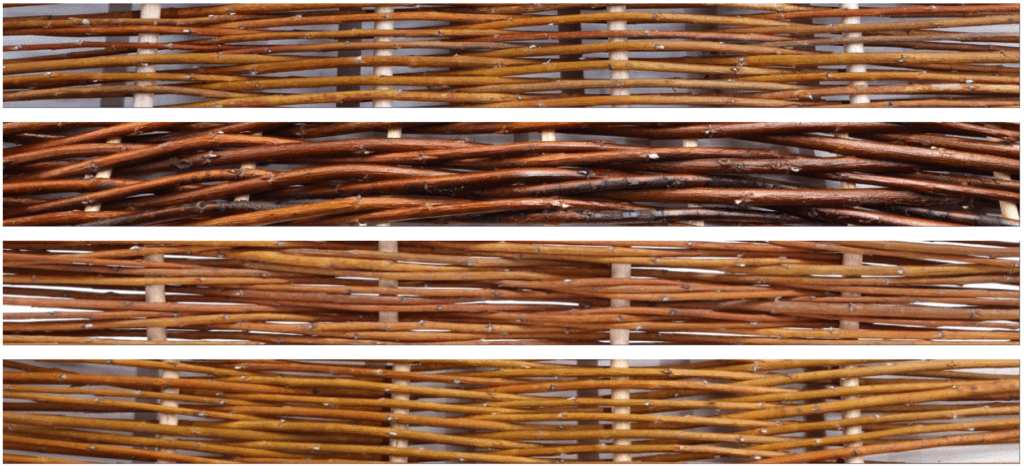
Our methodology decodes traditional weaving typologies, such as Randing, Three-rod Waling, Slewing, and Pairing, into a geometric memory for the robotic arm.
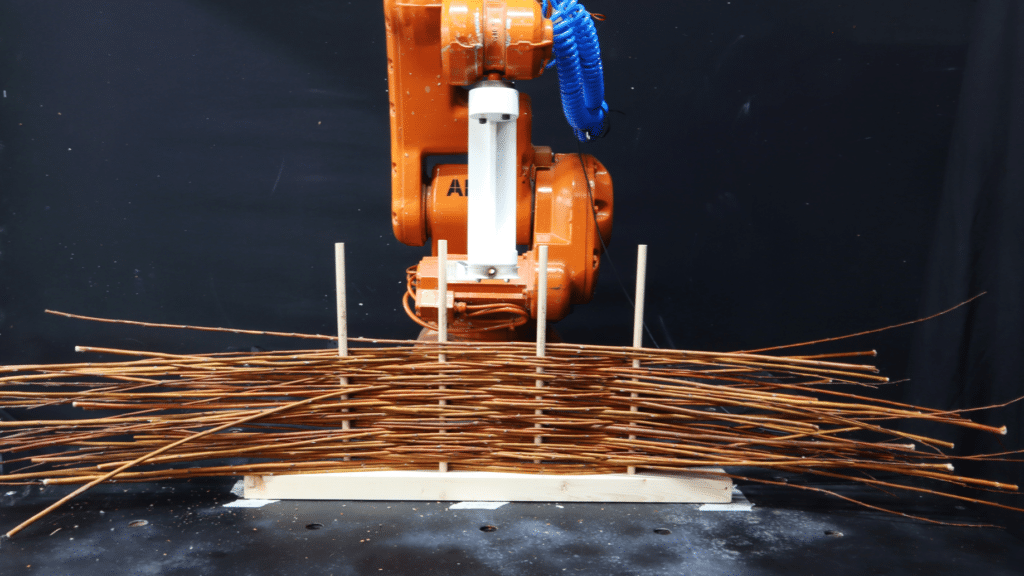
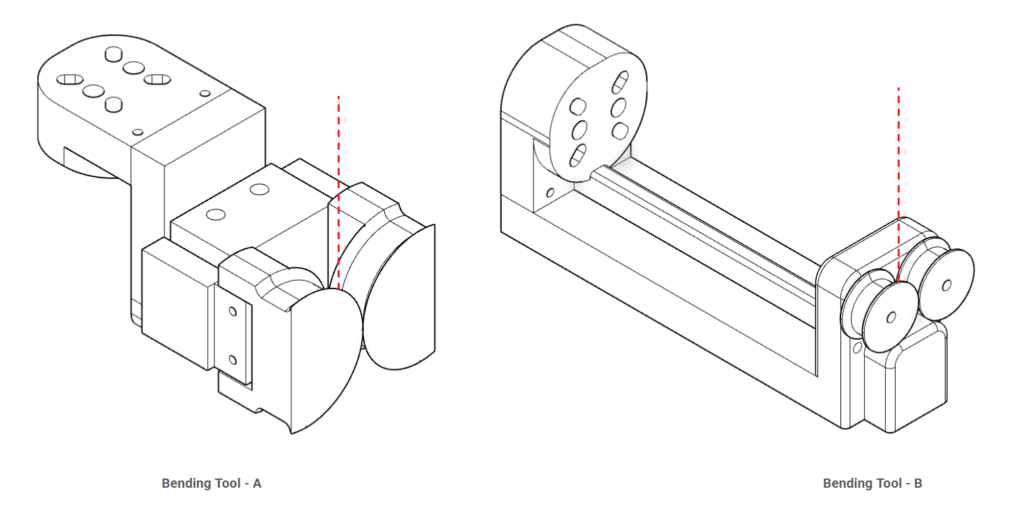
While traditional hand-weaving relies on the tacit knowledge and intuition of the artisan to manage tension, our system introduces a Human-in-the-Loop workflow. We developed a custom End Effector (Bending Tool) that allows the robot to handle the precise spatial routing and orientation , while the human operator provides the local compaction required for friction-locking. This hybrid approach scales up the complexity of traditional basketry without losing the structural integrity born from the material’s natural tension.
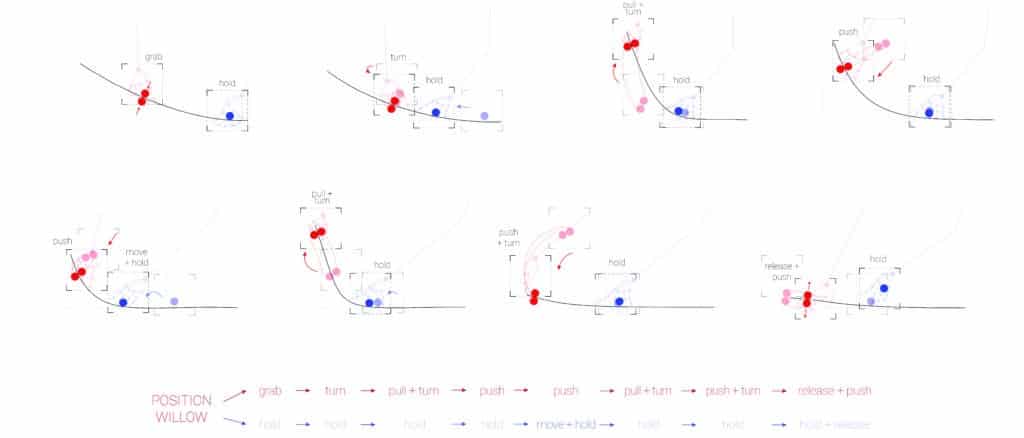
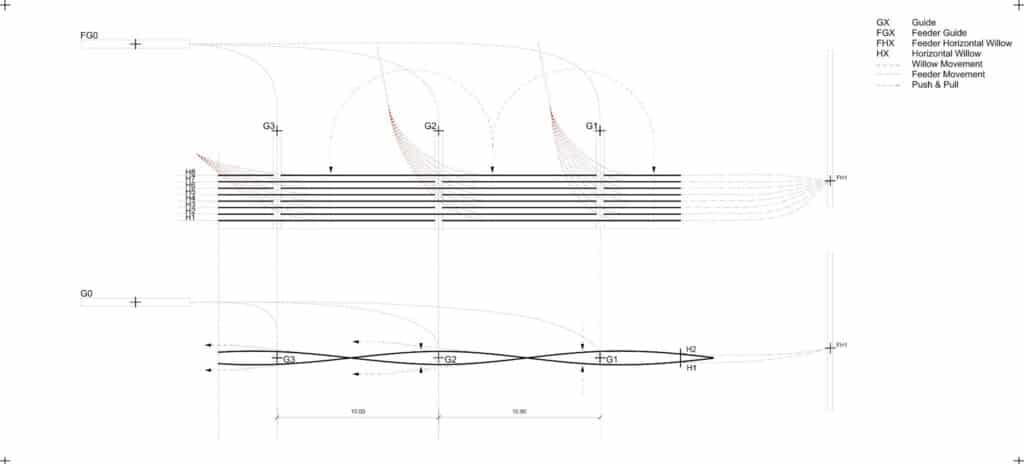
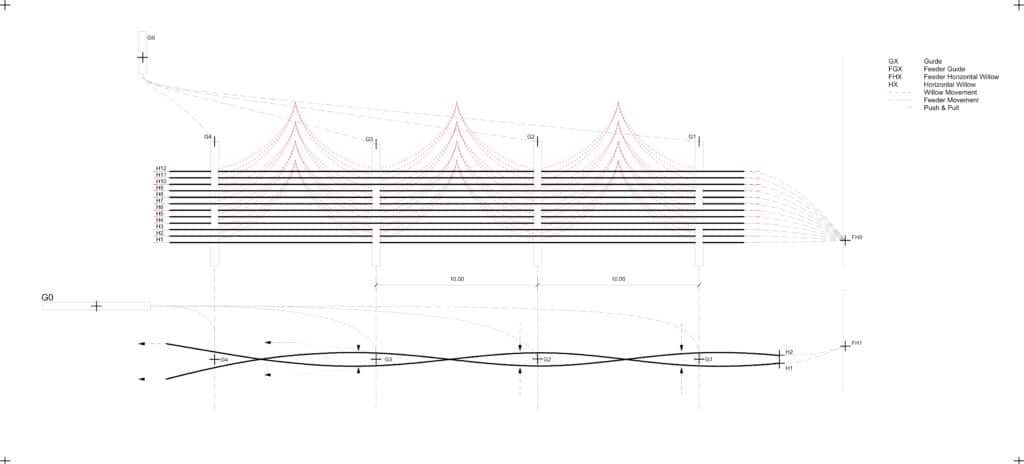
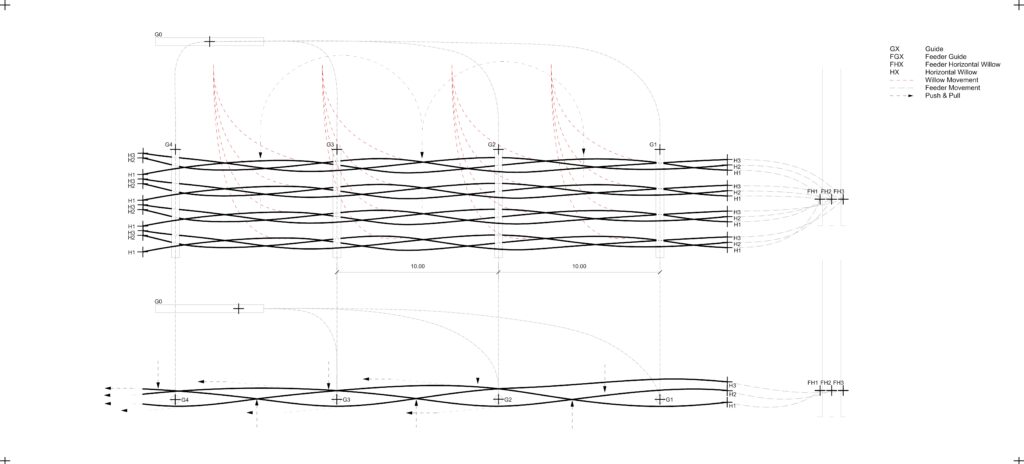
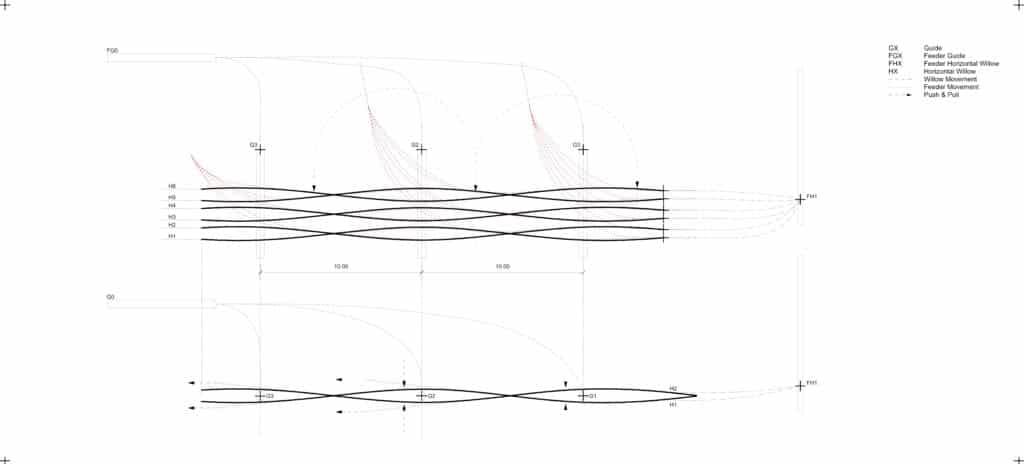
By graphically mapping the exact movements required for each weaving technique (such as Randing, Slewing, or Three-Rod Waling), we transition from tacit human intuition to explicit geometric data. These diagrams allow us to systematically isolate and define the vertical guides, the horizontal targets, and the precise toolpath trajectories for every specific pattern. Ultimately, this 2D abstract mapping becomes the foundational blueprint that enables us to program the robotic arm, allowing it to replicate complex, continuous material behaviors with absolute spatial precision.
Material Intelligence
Unlike standardized industrial materials, raw biomass is unpredictable. Before programming any robotic toolpaths, we conducted extensive bending and curvature testing to parameterize the physical properties of the willow rods.

Through empirical testing across various rod diameters and bending radious, we mapped the material’s elastic bending range, plastic deformation thresholds, and failure modes. A critical discovery was quantifying the material’s ‘springback factor.’ Understanding how much the willow retains its shape after drying allowed us to calculate the exact overbending required, translating raw biological behavior into precise computational data.

Hybrid Toolpath: Human-Robot Collaboration
Our fabrication process relies on a Human-Robot Collaboration (HRC) workflow. The robotic arm executes the precise weaving toolpath at the top of the vertical guides, while the human operator pushes and compacts the woven fiber downward. This manual compaction mimics the traditional “rapping iron” (ferro de batre), which directly inspired the design of our custom End-Effector. To accurately translate these craft movements into robotic code, we developed “logical drawings” for the Randing and Slewing patterns, mapping the exact trajectory prior to execution.
To effectively utilize raw, unpredictable biomass in robotic fabrication, we developed a comprehensive System Architecture. This framework acts as the central logic of our research, bridging the gap between biological properties and computational design. It is structured into four sequential phases:
1. Material Behavior & System Constraints Our workflow begins not with a digital model, but with the material itself. By parameterizing the willow’s physical traits, such as its moisture-dependent ductility, plastic deformation thresholds, and failure modes, we established strict systemic constraints. This empirical data defines our safe elastic bending ranges, vertical guide spacing, and the robotic working span, ensuring our algorithms never exceed the material’s natural limits.
2. Computational Pattern Rules Once the physical boundaries were set, we translated traditional weaving typologies (Randing, Pairing, and Slewing) into a programmatic logic. We defined clear rules for continuous strand flow, interlacing interactions, and friction-locking density. In this phase, the tacit intuition of the craft is converted into explicit, programmable geometric relationships.
3. The Hybrid Fabrication System The physical execution relies on a multi-agent workflow. The wooden frame provides the spatial constraint field, the robotic arm dictates the precise position-based routing, and the human operator performs the local compaction necessary for structural locking. Finally, the introduction of earthen clay acts as a composite infill, transitioning the tensile woven matrix into a solid structural element.
4. Structural Output & Evolution Currently, our output consists of frame-dependent, planar woven panels with measurable stiffness and curvature stability. However, our System Architecture is designed for growth. As we advance from simple position control to complex position-and-orientation routing, we are paving the way for a fully behavior-driven spatial system, capable of weaving thick, volumetric, and self-supporting architectural structures without the need for external frames.
