
Spatial Interface for Non-Standard Fabrication
STATE OF THE ART – RECIPROCAL STRUCTURE
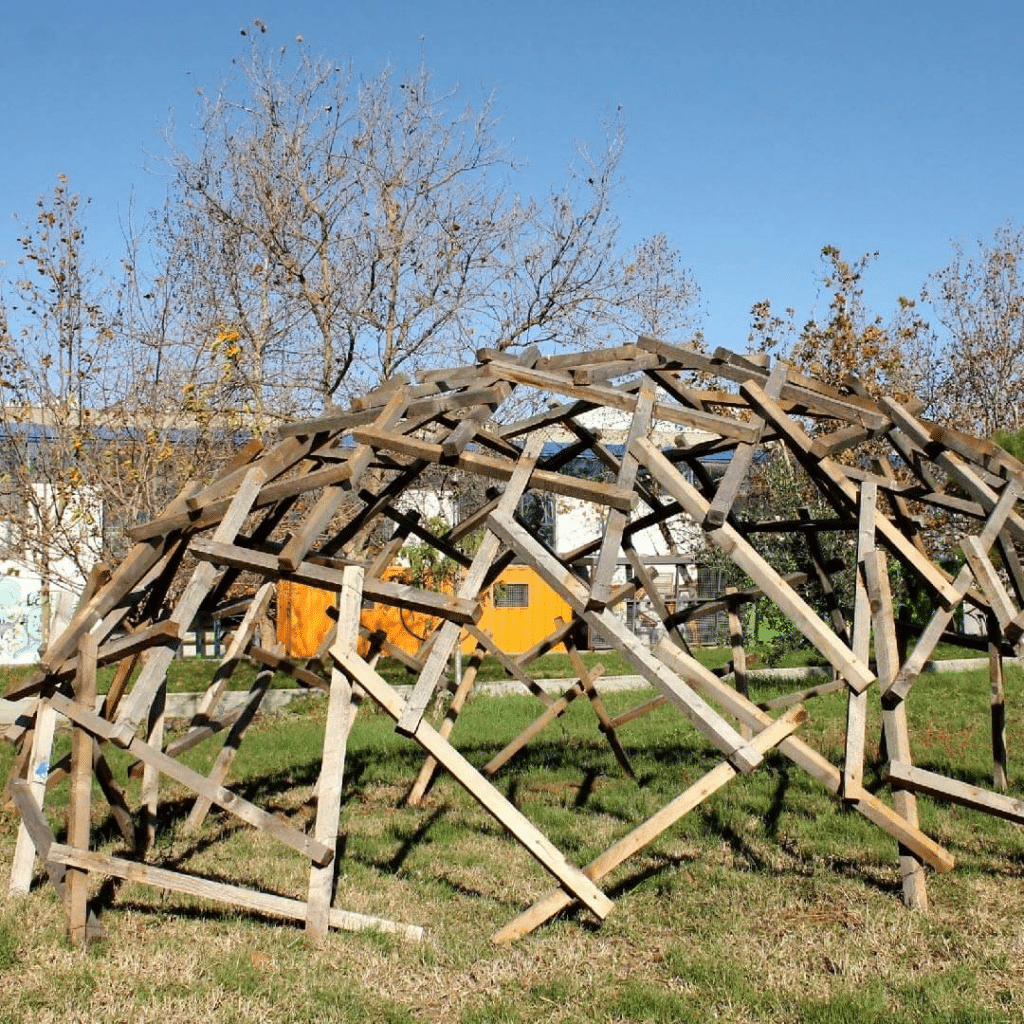
This project is inspired by reciprocal structures and explores how AI can support their design and construction. The work investigates a way to generate and build these interdependent structural systems through computational processes.
ALTERNATIVE JOINTS
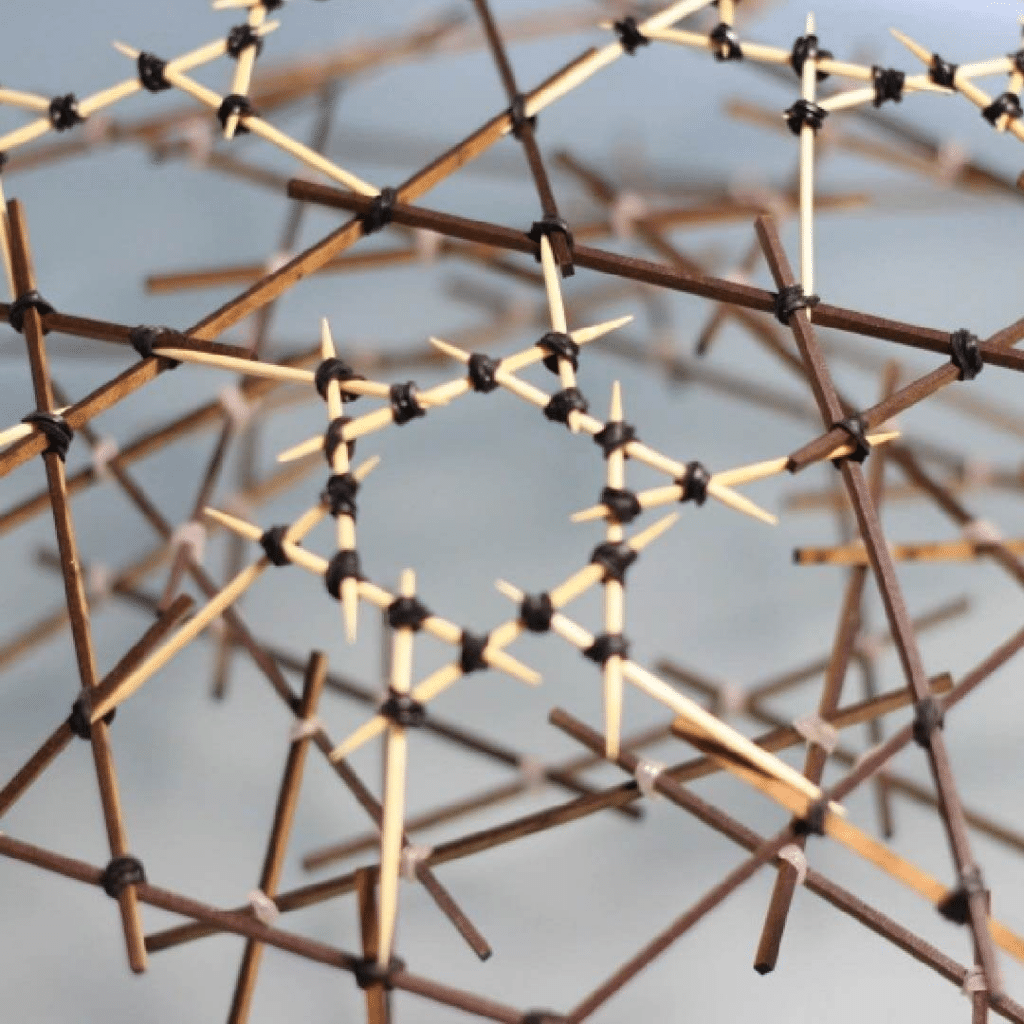

Connection options were analyzed as part of the development of the reciprocal structure. The study considered tied joints, nailed joints, and interlocking notched joints, where one element slots into another. For the initial design, tied end connections were selected.
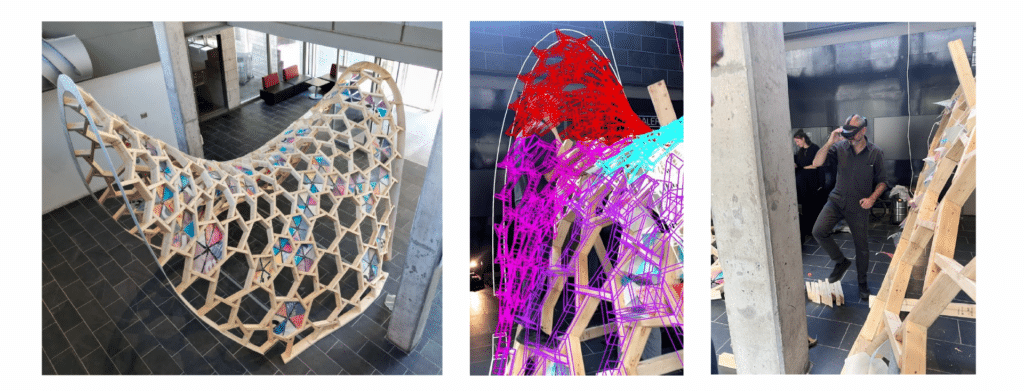
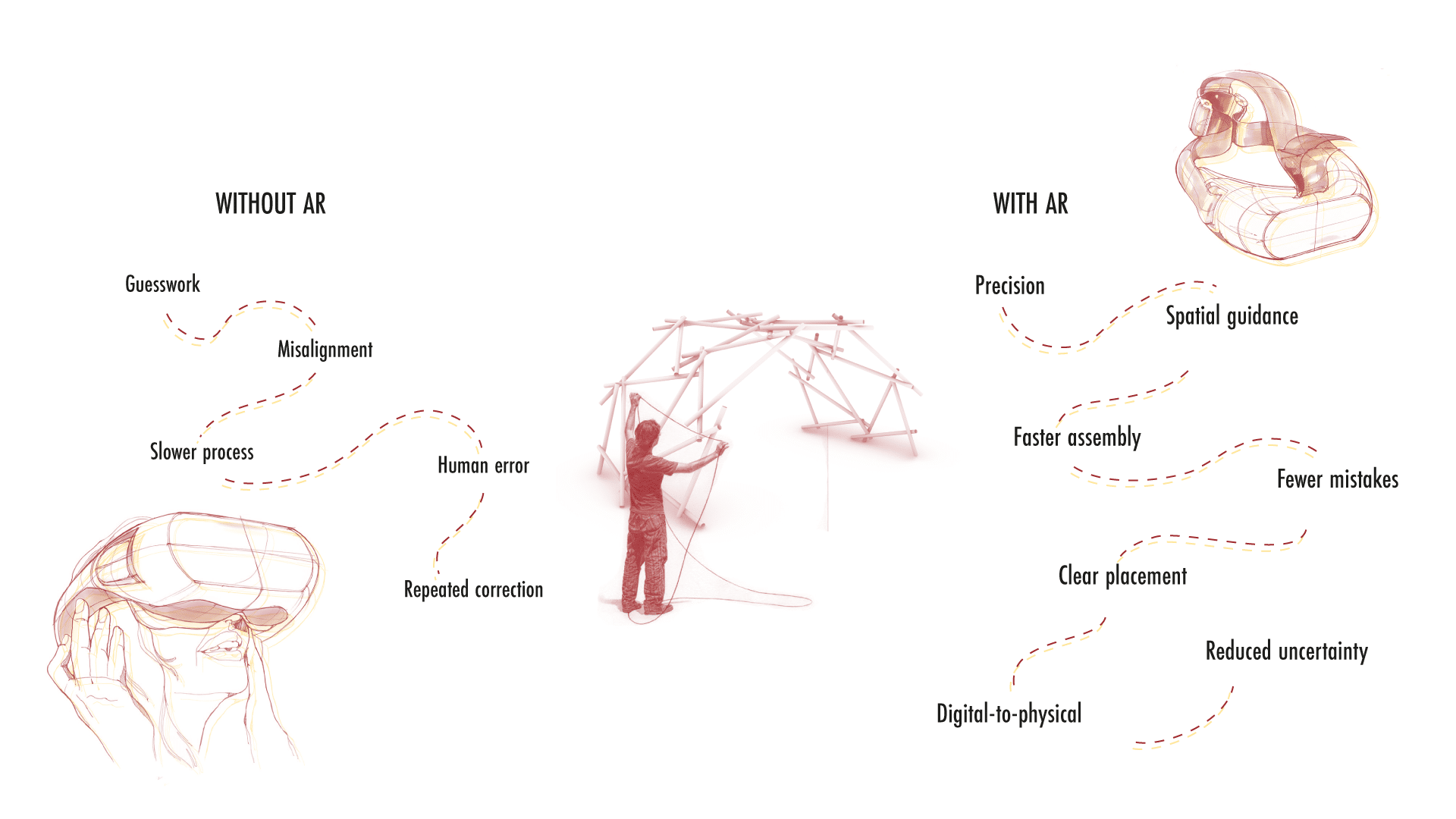
FABRICATION WITHOUT AR
Different fabrication scenarios were analyzed. Fabrication without AR can be misleading and may lead to assembly errors, requiring repeated checks, manual marking of elements, and additional coordination during construction.
FABRICATION WITH AR
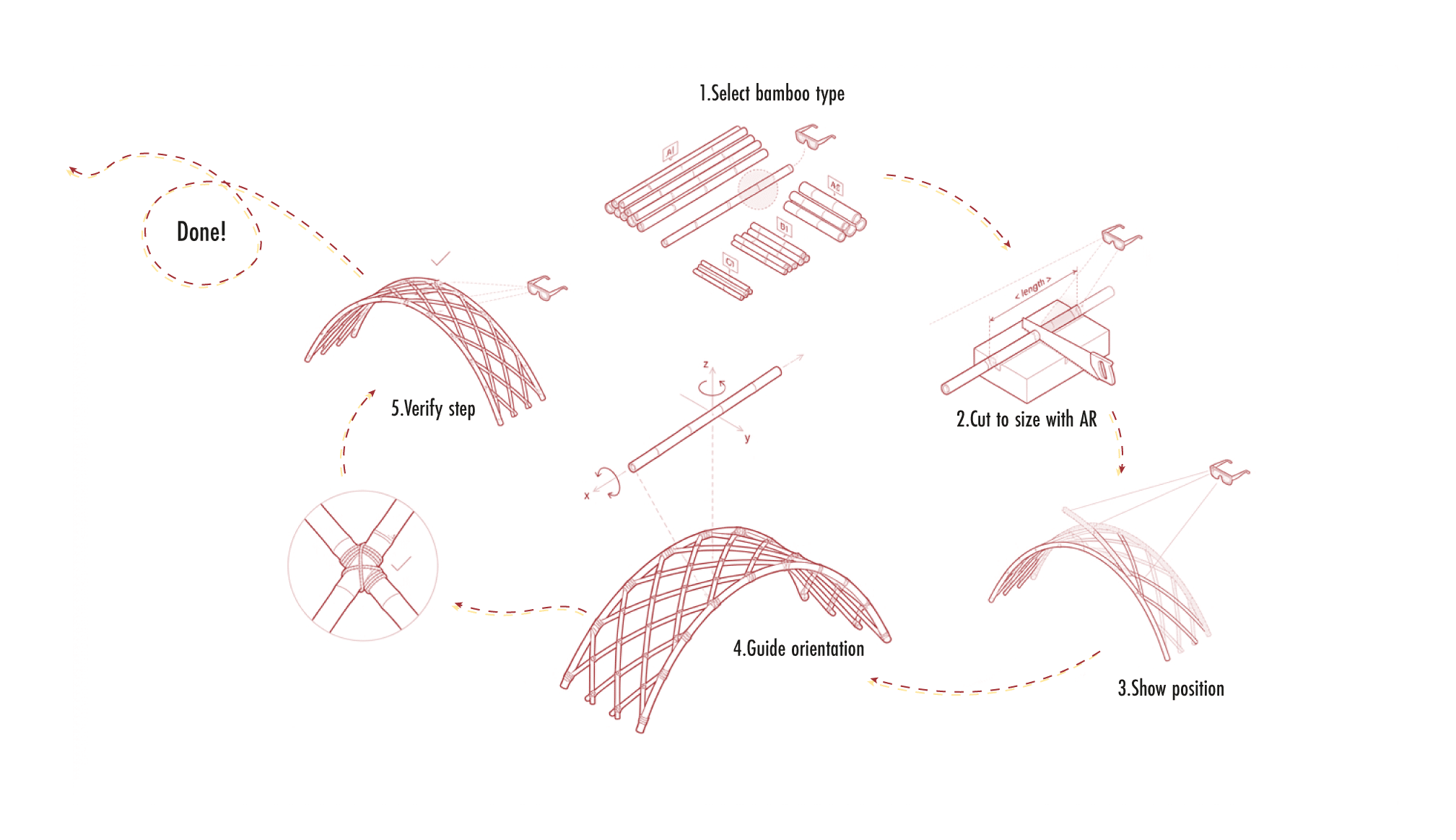
AR-supported fabrication allows the assembly process to be more precise and easier to follow. Instead of relying on pre-organized elements, manual markings, and repeated checks, AR provides step-by-step guidance by indicating which element to use and where it should be placed.
DESIGN PROPOSAL
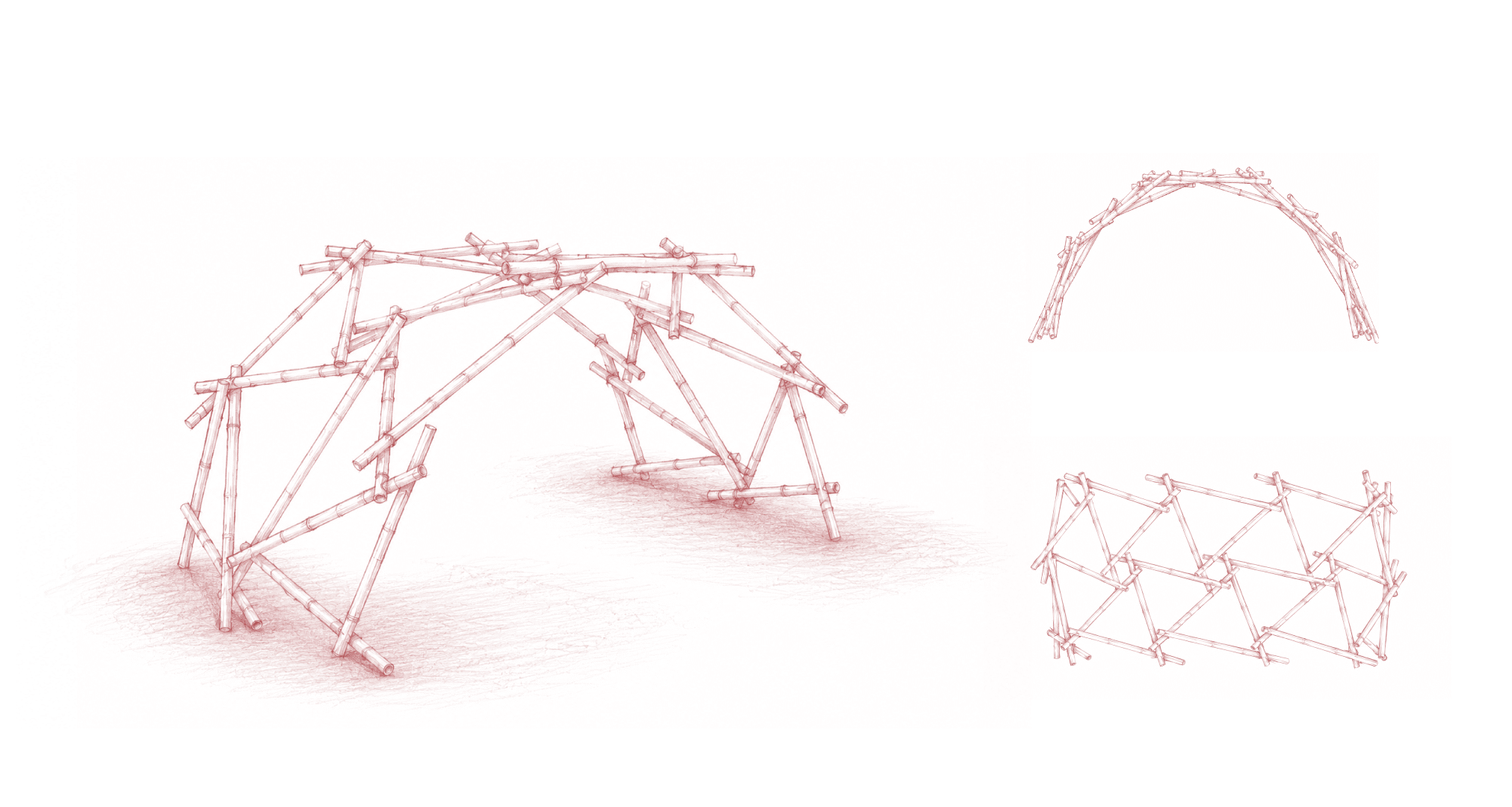
For the design proposal, bamboo sticks were selected as the main structural elements, with thread used to tie the connections together. This approach defines both the material system and the initial form of the reciprocal structure.
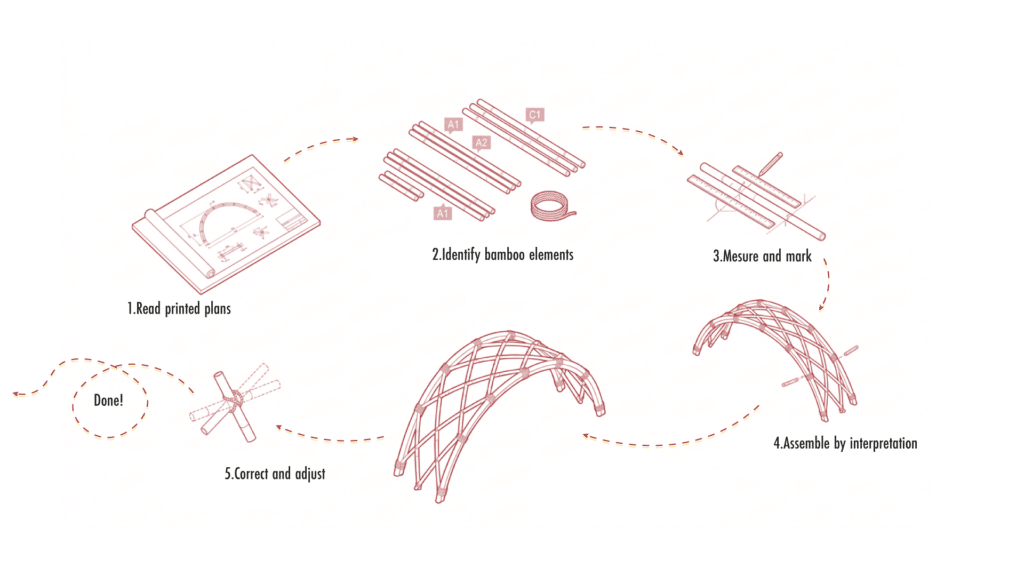
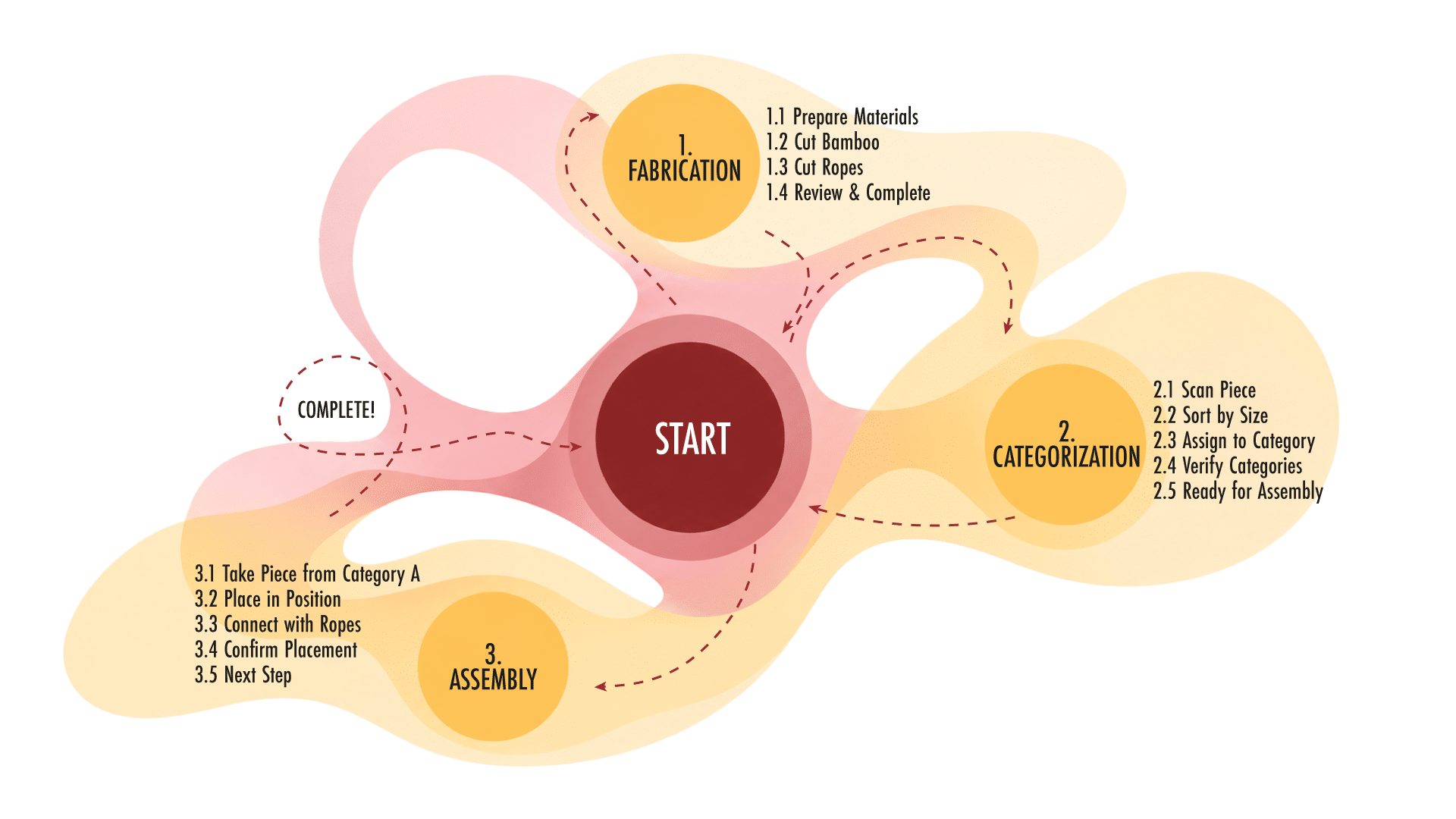
FABRICATION PROCESS
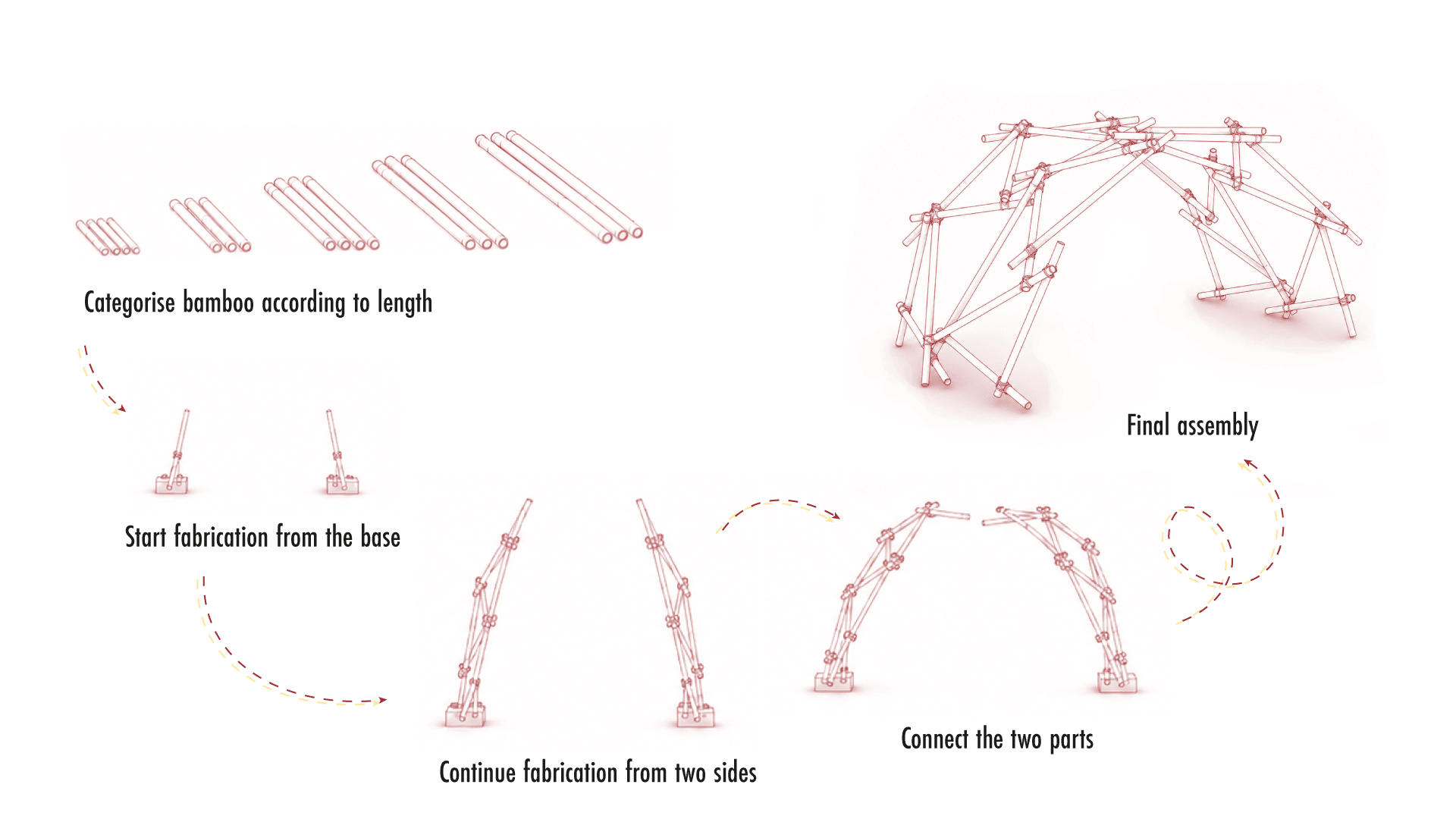
The fabrication process begins by identifying and categorizing the required stick lengths. The structure is then assembled from two sides, starting from the ground. Once both halves are formed, they are connected at the center to complete the overall system.
WORKFLOW
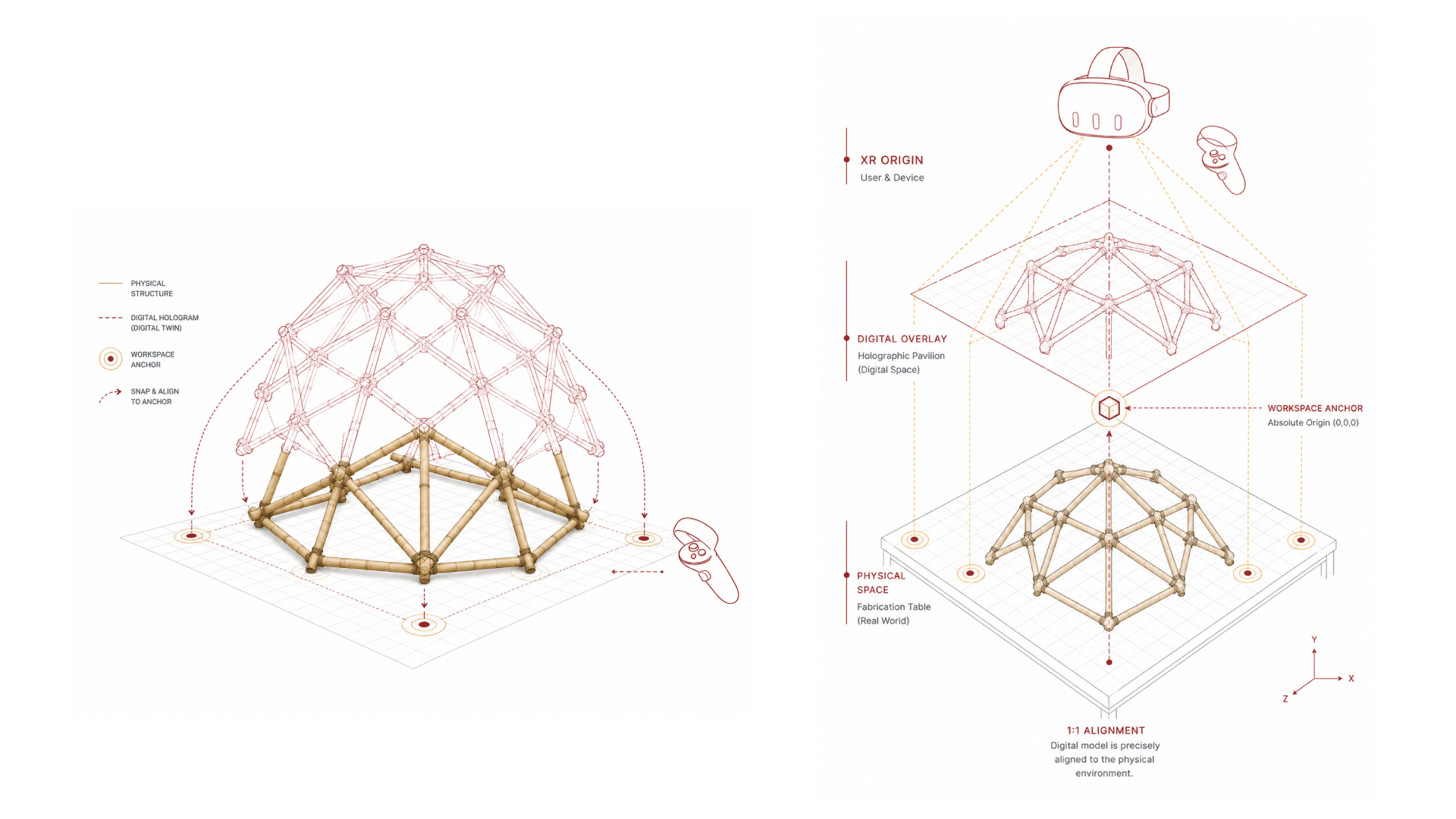
XR RIG & SPATIAL SYNCHRONISATION
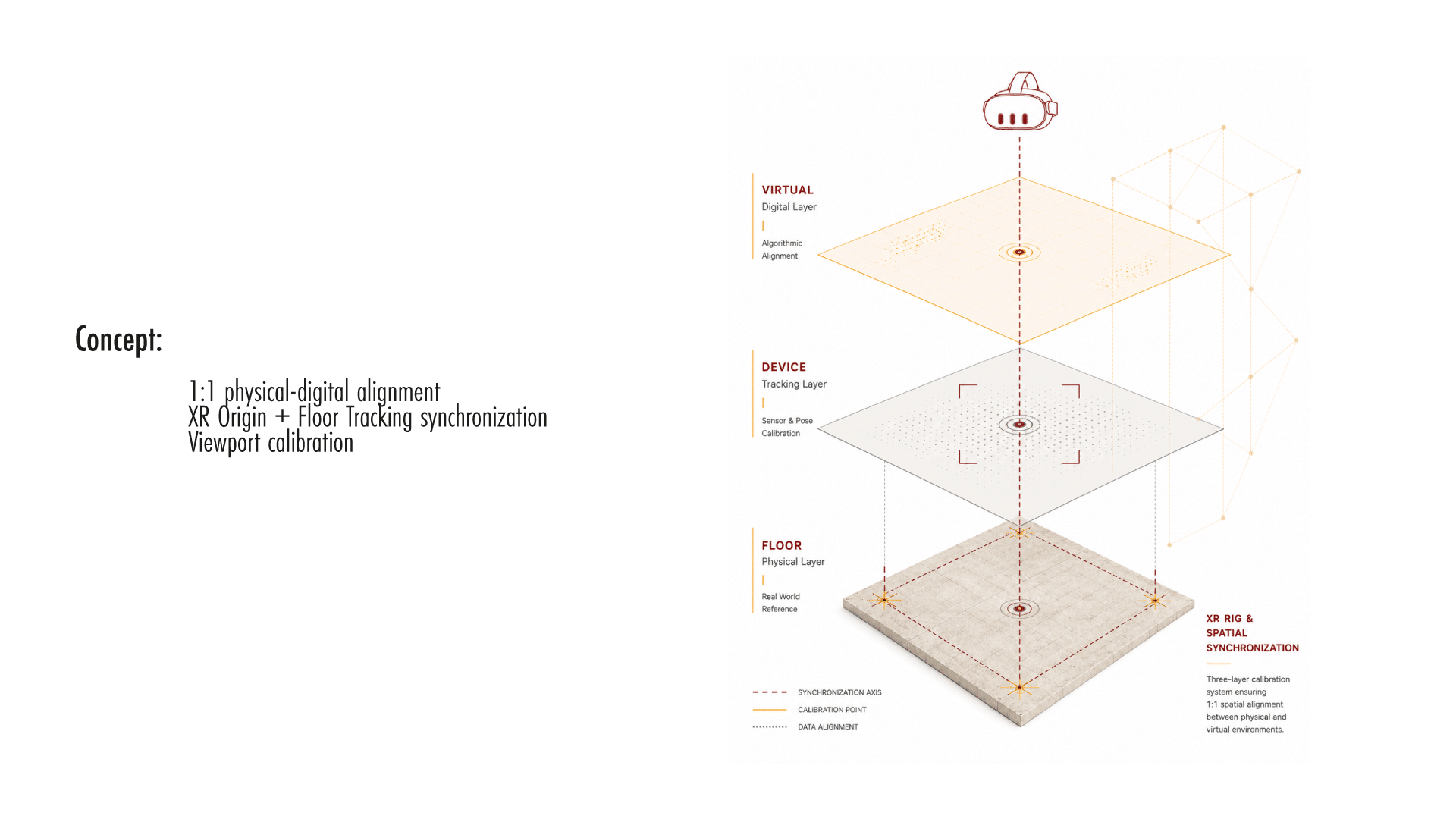
The XR Rig establishes a shared coordinate system between the physical fabrication workspace and the digital pavilion model. By continuously tracking the headset and controllers, the system generates a persistent WorkspaceAnchor that ensures the holographic geometry remains accurately aligned with the physical environment throughout the assembly process.
WORLD SPACE UI & HARDWARE CALIBRATION
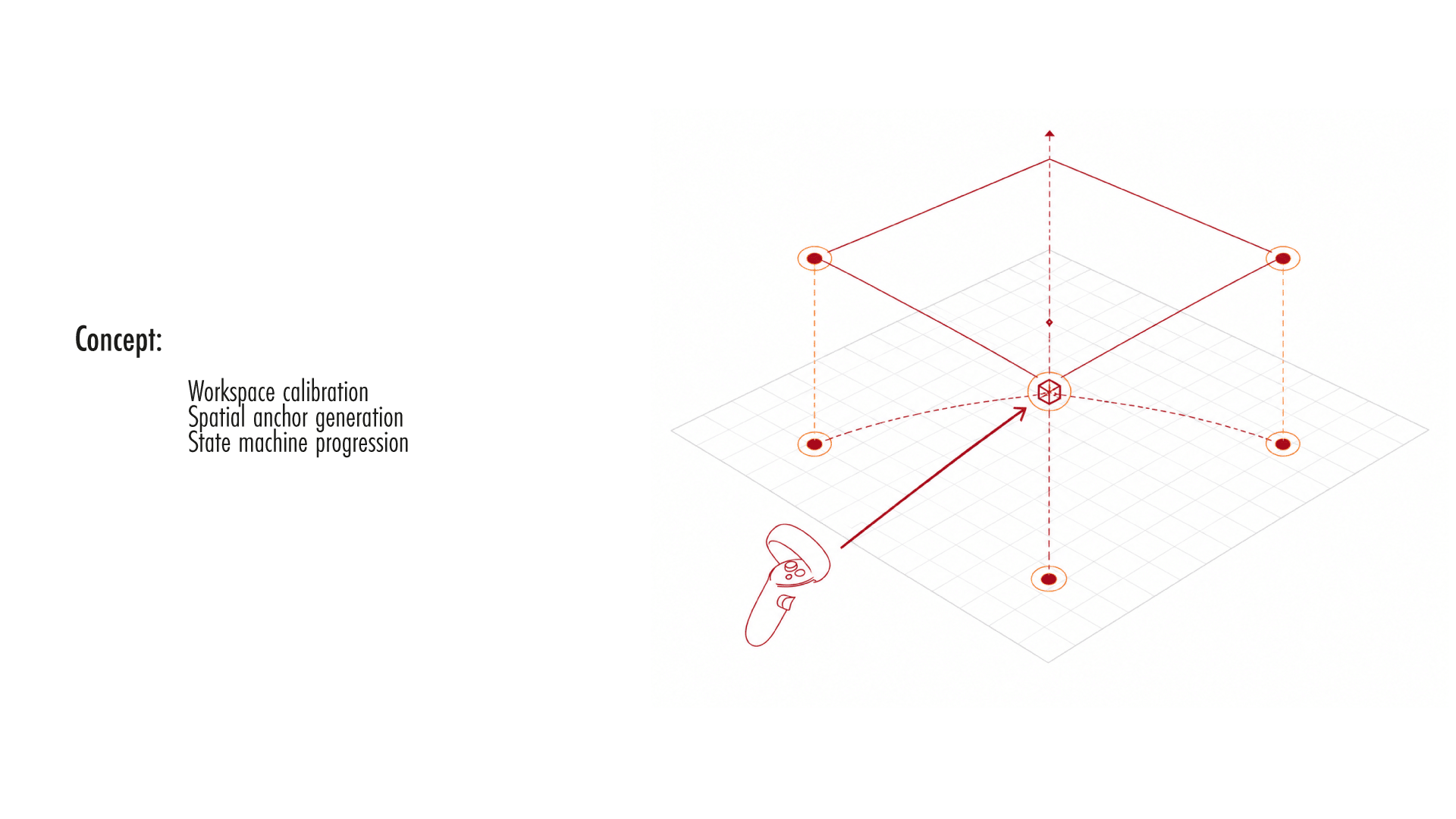
The application uses World-Space UI elements that exist directly within the user’s physical environment. During calibration, the fabrication boundary is defined through corner points and hardware-assisted inputs, allowing the workspace dimensions and reference height to be established with precision before assembly begins.
INTERACTION MANAGEMENT & SPATIAL SNAPPING
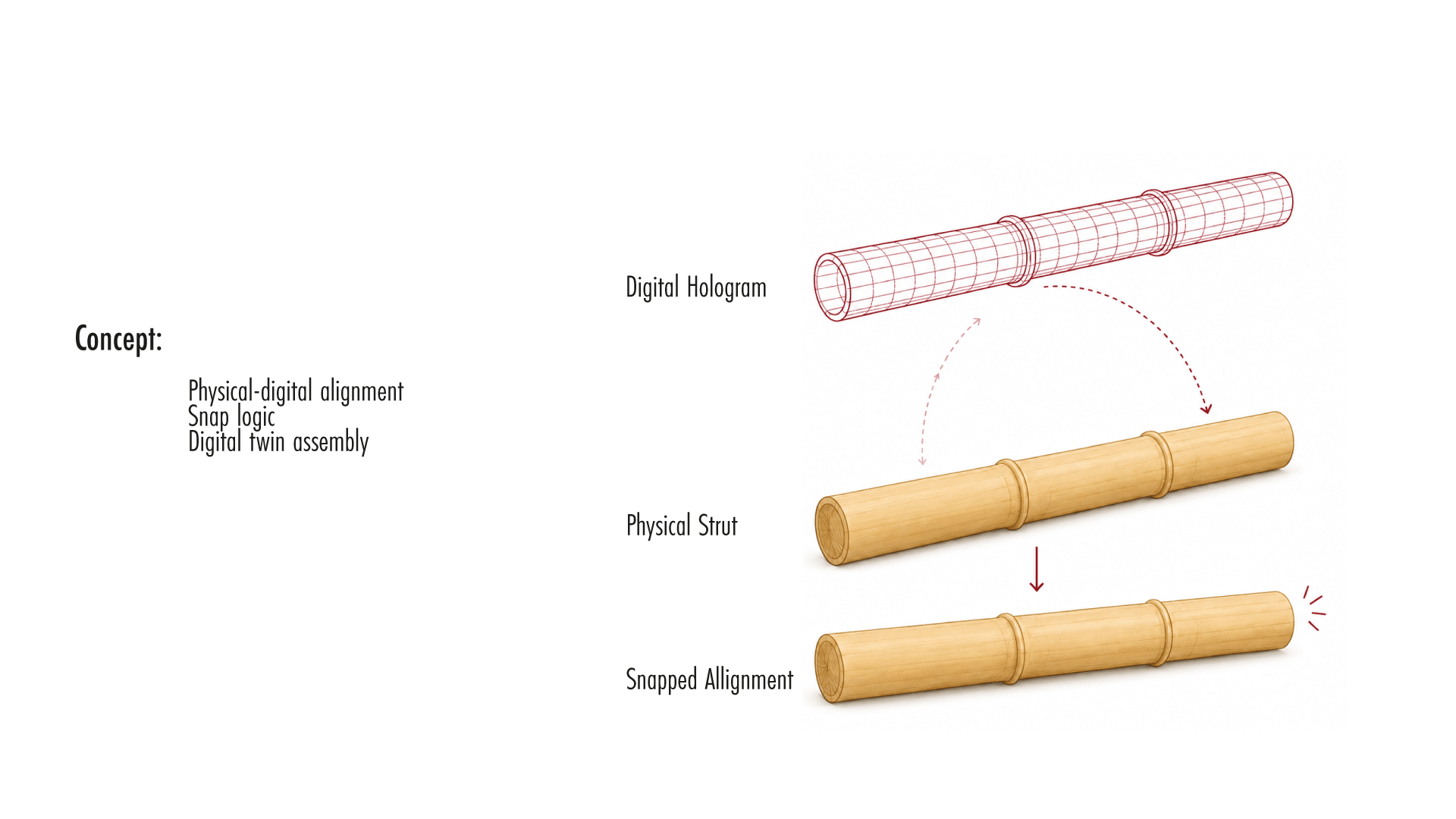
The interaction system constrains calibration points to predefined movement directions, ensuring accurate workspace definition while preventing unintended vertical displacement. Once the workspace is calibrated, the system automatically calculates the required alignment parameters and snaps the digital pavilion into precise registration with the physical assembly area.
WORKFLOW
Exogram integrates spatial registration, workspace calibration, and automated alignment into a unified XR fabrication workflow. By establishing a shared coordinate system between the physical workspace and the digital structure, the system enables accurate holographic guidance and real-time assembly
