
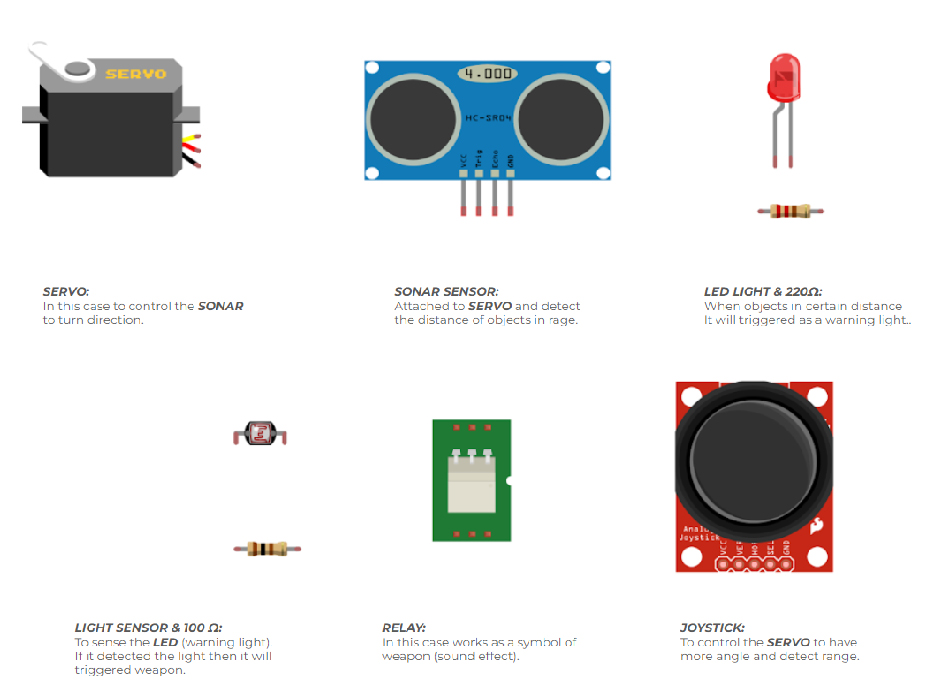
Using the SONAR sensor as the main detector
. But the default range of the sensor is too small (15 degrees only),
so adding a SERVO which controls by a JOYSTICK can allow the system to have more coverage area.
If something (enemy) is approaching a certain distance,
the SONAR sensor will turn on a LED light to activate RELAY (weapon).
2. Control system: Manually control the detection range
3. Weapon system: Automantly triggered according to a specific situation
COMPONENTS
CODE
#include <Servo.h> //Include the servo library
Servo servo1;
Servo servo2;
int joyX =0;
int joyY =1; //none
int joyVal; //joystick value
#include <NewPing.h>
int ledPin1=10; //led
int ledPin2=12; //relay
int lightPin = A3; //light sensor
int lightValue; //light sensor
int dist;
#define TRIGGER_PIN 7 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 8 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 400 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
void setup()
{ //attaches our servos on pins PWM 3-5
servo1.attach(3);
servo2.attach(5); //none
//Serial.begin(115200); //sonar sensor
Serial.begin(9600); //light sensor
pinMode(ledPin2, OUTPUT);
}
void loop()
{
//read the value of joystick (between 0-1023)
joyVal = analogRead(joyX);
joyVal = map (joyVal, 0, 1023, 0, 180); //servo value between 0-180
servo1.write(joyVal); //set the servo position according to the joystick value
joyVal = analogRead(joyY);
joyVal = map (joyVal, 0, 1023, 0, 180);
servo2.write(joyVal);
delay(15);
Serial.print(sonar.ping_cm());
// Send ping, get distance in cm and print result (0 = outside set distance range)
Serial.println(“cm”);
dist = sonar.ping_cm();
if(dist >= 20){
digitalWrite(ledPin1, LOW);
}
if(dist < 20){
digitalWrite(ledPin1, HIGH);
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
}
int lightValue = analogRead(lightPin);
int mapValue = map(lightValue, 600, 20, 0, 10); //200=min light, 20=max light
//mapValue = constrain(mapValue, 0 ,10);
Serial.print(mapValue);
Serial.print(“–“);
Serial.println(lightValue);
if(mapValue > 5){
digitalWrite(ledPin2, HIGH);
delay(20);
digitalWrite(ledPin2, LOW);
delay(20);
}
else{
digitalWrite(ledPin2, HIGH);
}
}
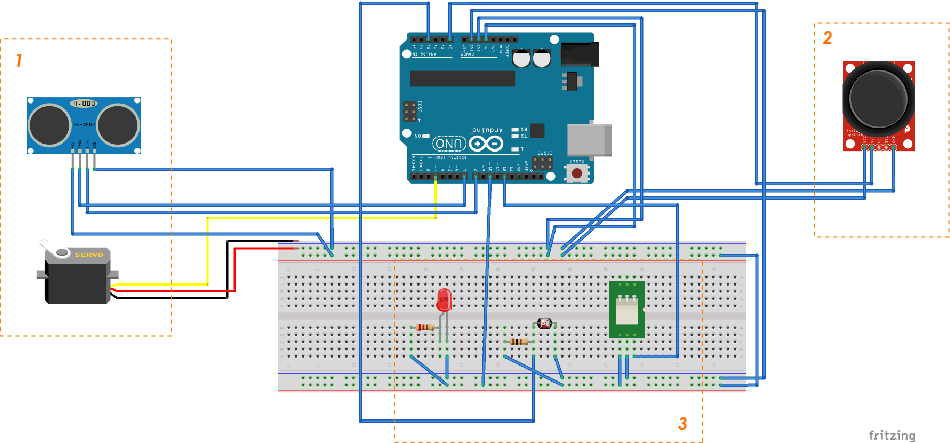
WIRING

