
Introduction
Glazing Virtuoso marks a pivotal shift in the spray glazing industry, where craftsmanship meets cutting-edge robotics to usher in a new era of creative expression and manufacturing precision. This project enhances creative workflows by seamlessly integrating intricate spray glazing techniques, that would blend in traditional artisanal craft empowering artists with unprecedented control that could foster a quite unique collaborative synergy between human expertise and robotic capabilities in the application of custom glazeing. From architectural masterpieces to bespoke installations, Glazing Virtuoso aims to set a new standard for the industry, blending tradition with innovation to redefine the possibilities of design and fabrication.

State of the Art
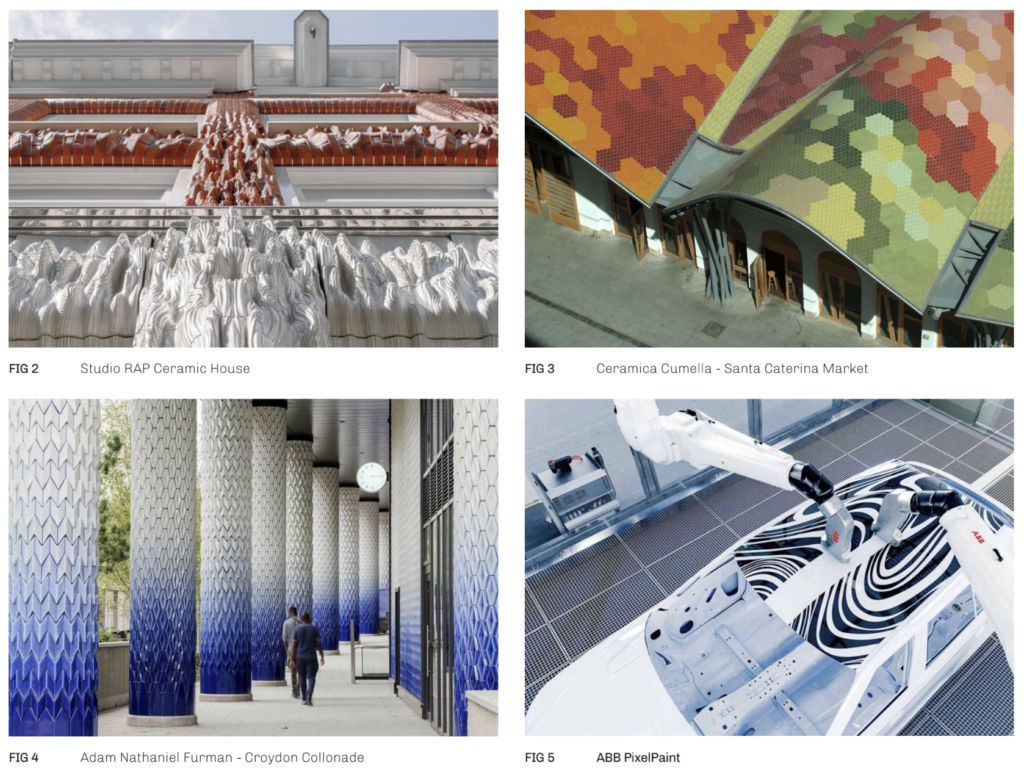
Glazing serves critical purposes in ceramic applications, including surface protection, light reflection, and heat insu- lation. Beyond functionality, it transforms ceramic objects into vibrant, colorful creations. This is equally vital in large-scale projects such as facades or roofs, exemplified by studios like Ceramica Cumella, Studio RAP, and Atelier ANF, which traditionally hand-glaze each piece. However, manual glazing is laborious and repetitive. To enhance efficiency, we propose integrating robots into the process. Robots ensure consistent application with minimal margin for error, significantly enhancing the precision of glazed finishes. (FIG. 2,3,4) The automotive industry which has had large partnerships and an immediate impact in the adoption of technological innovation have been developing customizable automated options when it comes to finishing a car. Companies such as Mitsubishi and even Robotic giants like ABB have dwelled into the automotive spraying and introducing innovation such as with the Pixel Paint adoption. (FIG 5) In household items such as toiletry the industry has become streamlined in automation where toilets, bathtubs, etc undergo a robotic glazing procedure to quickly produce thousands of pieces. With this in mind we try to incorporate workflows seen across non-architecture industries and provide them as a possible architectural procedure to further increase the possibilities of large scale ceramic ware in the AEC Industry.
Tool
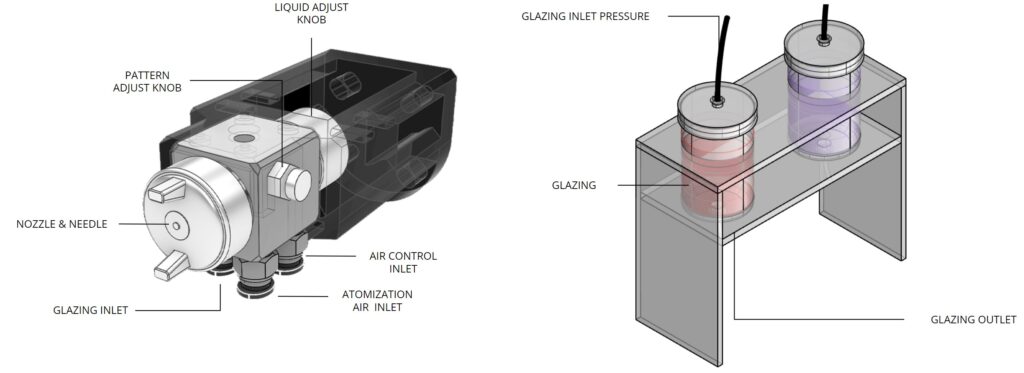
To scale to the needs of large glazing projects and utilize a reliable solution, we decided to purchase a Japanese Airsprayer, specifically the A100 model with a much larger 1.3mm nozzle. This industrial solution is typically used for paint and can be triggered with a solenoid valve. It features settings for pressure and spray cone diameter. With a simple mounting mechanism, we can attach it to a robot. To supply the glaze to the sprayer, we developed a straightforward rig. We use a pressurized container to hold the glaze. To ensure a consistent flow to the sprayer, the glaze needs to be pressurized at a low but constant pressure. We achieve this by pressurizing the air behind the glaze, maintaining a system pressure of around 2 bar, with the glaze itself at a slightly lower pressure, typically less than 0.1 bar. This setup allows us to efficiently apply glaze to large surfaces while maintaining control over the application process.
To scale up to meet the needs of large glazing projects and utilize a reliable solution, we decided to purchase a Japanese Airsprayer, specifically the A100 model with a much larger 1.3mm nozzle. This industrial solution is typically used for paint and can be triggered with a solenoid valve. It features settings for pressure and spray cone diameter. With a simple mounting mechanism, we can attach it to a robot. To supply the glaze to the sprayer, we developed a straightforward rig. We use a pressurized container to hold the glaze. To ensure a consistent flow to the sprayer, the glaze needs to be pressurized at a low but constant pressure. We achieve this by pressurizing the air behind the glaze, maintaining a system pressure of around 2 bar, with the glaze itself at a slightly lower pressure, typically less than 0.1 bar. This setup allows us to efficiently apply glaze to large surfaces while maintaining control over the application process.
Workflows
Blending artisanal craft with robotics involves creating workflows that cater to different target demographics while utilizing the same robotic setup. Here’s how each workflow, “Precise Robotic Glazing” and “Human-Robotic Collaboration (HRC),” can be structured and utilized by artists and designers in the glazing space:
Human-Robotic Collaboration (HRC): Catering to artisans skilled in traditional glazing techniques, this workflow introduces robotics gradually to enhance productivity and explore new design possibilities. Artisans continue to utilize their familiar tools for creating ceramics, while robotic assistance automates repetitive tasks or manages larger-scale projects efficiently. Training and support are provided to help artisans integrate robotic technologies effectively, encouraging collaborative innovation that combines traditional craftsmanship with the precision and efficiency of robotic systems.
These workflows leverage a shared robotic setup that includes a versatile robotic arm and supporting software tools, fostering creativity and productivity across different skill sets within the glazing industry.
Precision Glazing
Targeting digital artists, architects, and designers familiar with digital tools, this workflow integrates advanced software like Grasshopper for parametric design and visualization. It facilitates the generation of precise toolpaths that guide a robotic arm equipped with a solenoid-triggered Airsprayer. This setup ensures accurate and repeatable application of glaze according to intricate digital designs. Artists maintain creative control by overseeing the process, allowing for meticulous adjustments to achieve desired aesthetic outcomes.
Flutet Tile

Human-Machine Collaboration
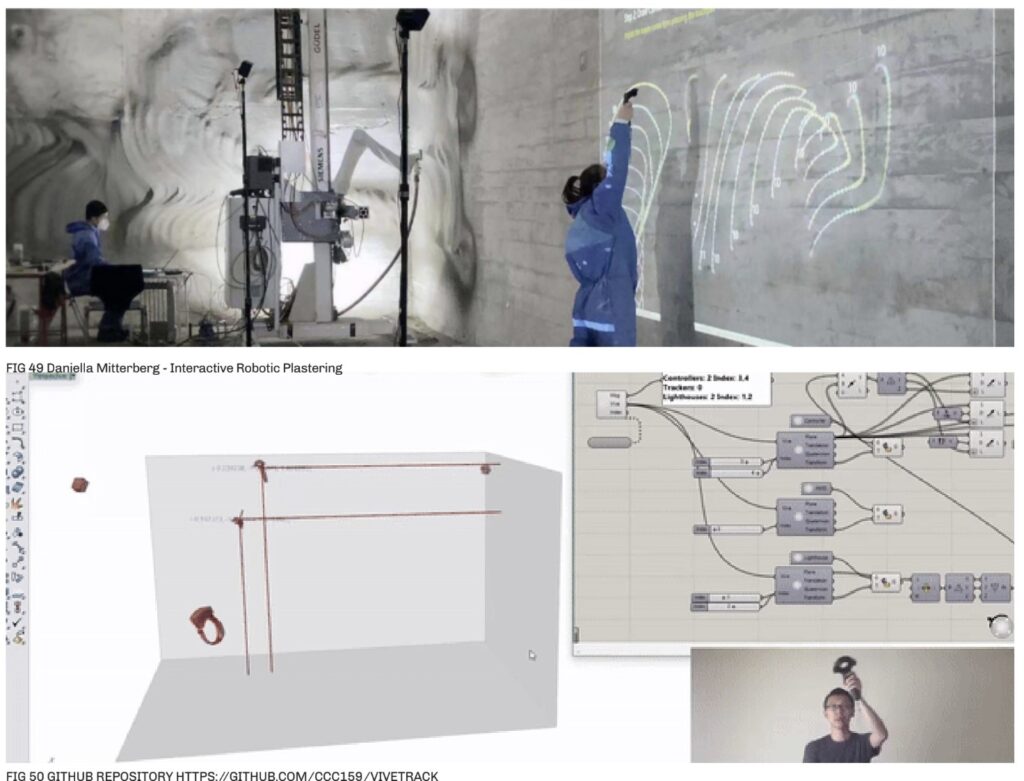
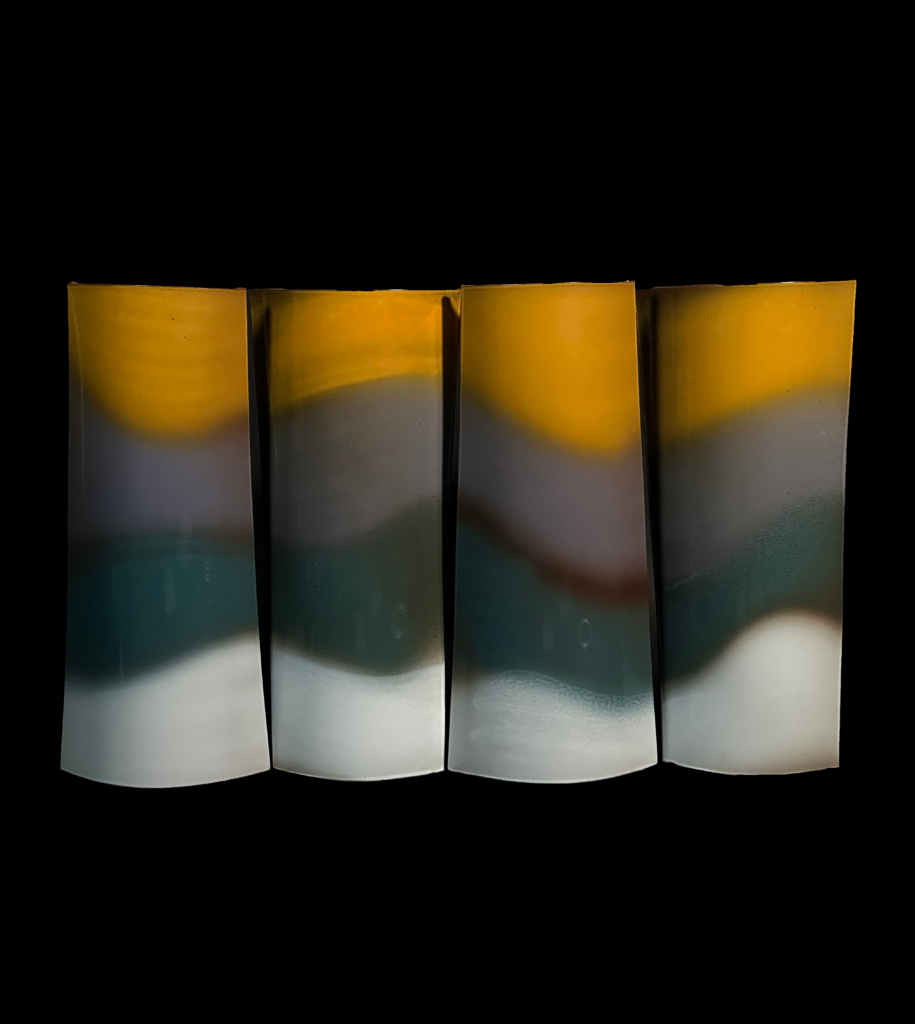
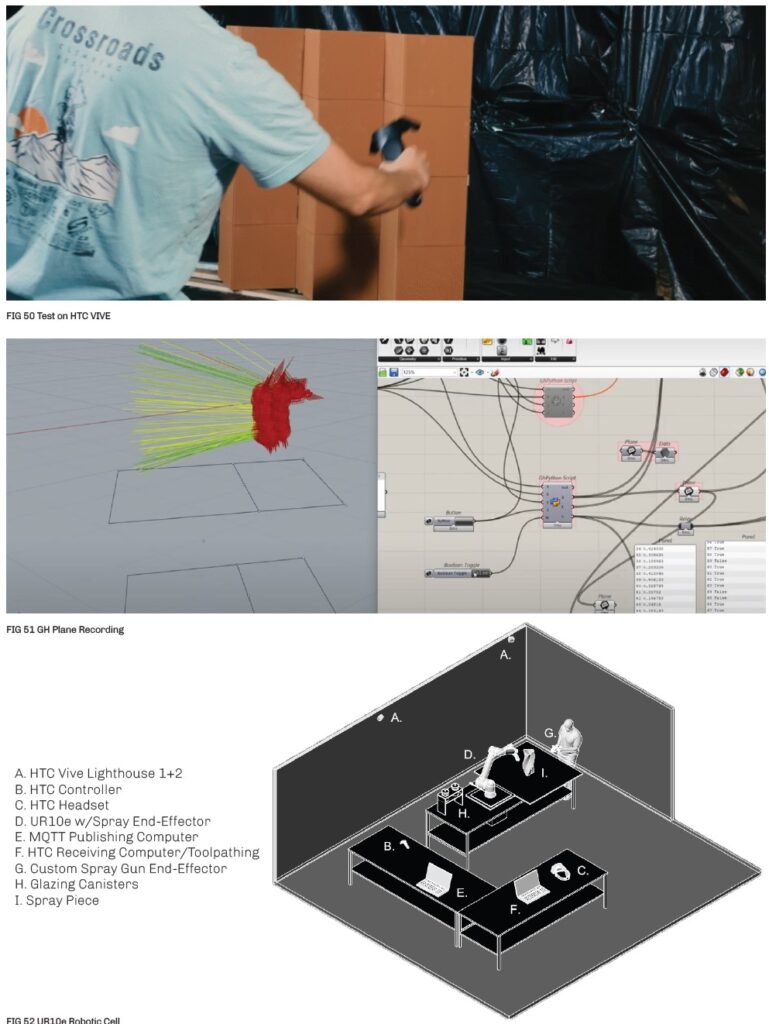
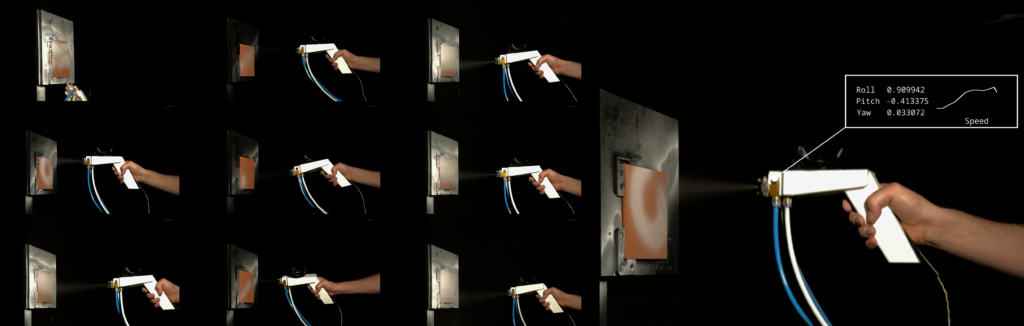
To teach a robot how to effectively create a more fluid stroke, and combine a much finer synergy between how a craftsman may spray by hand and its robotic counterpart, a Human-Machine approach was derived. With VR equipment accessible to us we began explorations following on the footsteps of various projects that had utilized a workflow that could be deemed similar. In the paper “Interactive Robotic Plastering: Augmented Interactive Design and Fabrication for On-site Robotic Plastering” Daniela Mitterberg and ETH Team utilized ROS to localize the HTC VIVE Conbtroller in space and thus were creating an adaptive robotic toolpath for spraying plaster in-situ. (FIG.) As a different approach our team found a GitHub repository that undertook the task of being able to stream the live data (Positioning) of HTC VIVE devices directly onto Grasshopper. FIG 50. This approach proved to be quite a powerful tool to add to our arsenal, albeith it only worked in RHINO6. To correctly track the trackers, a space surrounding the robot UR10e ,two Lighthouses would be placed that would have a fixed position, as well as having the headset in view of the Lighthouses, this would allow for the tolerance of transfor- mations to diminish, the more devices that are located in the space, the more accurate the tracking becomes.(FIG.) To further customize the plugin “VIVETRACK”, we developed custom PYTHON Scripts that would RECORD the current plane of the tracker itself in space and reorient based on a custom made Human-USE end-effector. Velocities and when the human activated the spray were also recorded; this end-effector would allow for a case study in which invited ceramicists from KEMA Ceramics in Barcelona, Spain to partake on a data recording session where the artist would have their movements mimicked by the robotic arm. The following images were the results.
Machine Learning Adoption – Future Steps
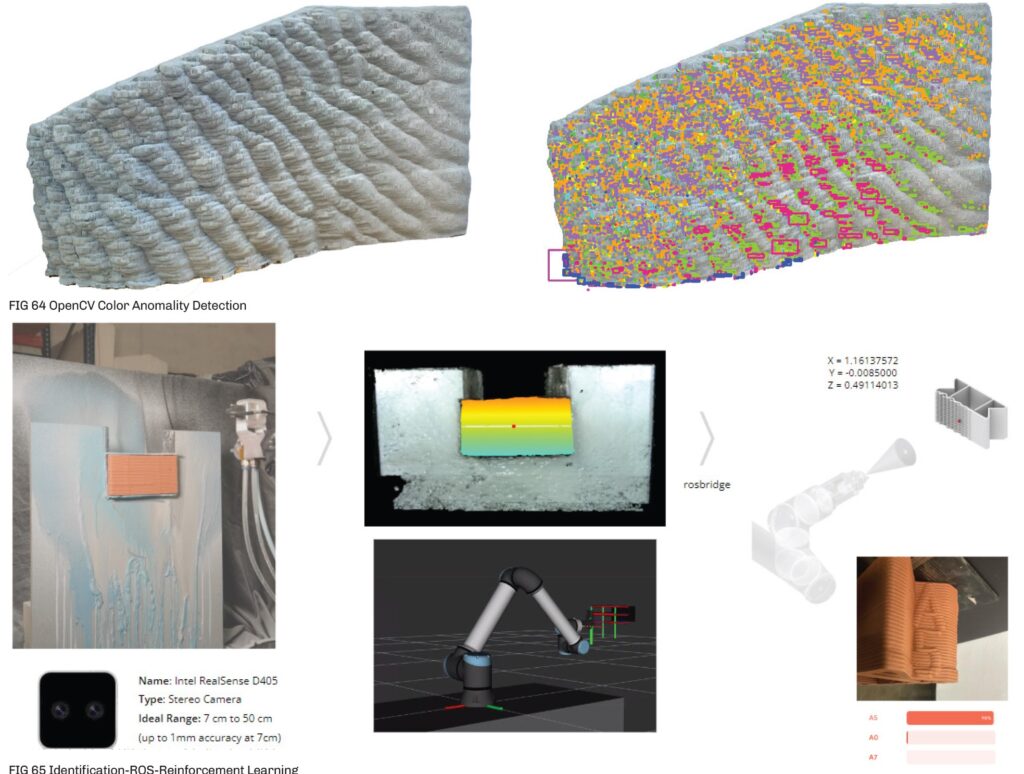
In the realm of ceramics, the transition from pre-baked to post-baked pieces, especially in terms of glazing outcomes, can be both an art and a science. Predicting how a piece will look after it has been fired and glazed is a challenge that has long intrigued artists and scientists alike. Advances in computer vision and machine learning are now making it possible to forecast these results with remarkable accuracy, offering new possibilities in the ceramics industry. The journey begins with capturing high-resolution images of the pre-baked pieces. Utilizing OpenCV, an open-source computer vision library, we can preprocess these images to enhance their quality. Techniques such as noise reduction, edge detection, and feature extraction are applied to highlight the intrinsic details of the piece’s surface. These details include texture variations, color distributions, and any surface anomalies that might influence the final glazed appearance. Machine learning, particularly convolutional neural networks (CNNs), plays a crucial role in this predictive process. These neural networks, built and trained using libraries such as TensorFlow or PyTorch, can learn complex patterns and relationships between the pre-baked features and the final glazed results. By feeding the model a substantial dataset of pre-baked images paired with their corresponding post-baked outcomes, the CNN can develop a predictive capability that simulates the glazing effects. Clustering and segmentation techniques further refine this analysis. Methods such as K-means clustering and the Watershed algorithm, available in OpenCV, are used to divide the surface into distinct regions. These segmented areas are crucial for understanding how different parts of the piece will react to glazing and firing processes. For instance, regions with varying textures or color intensities might absorb glazes differently, resulting in diverse visual effects post-baking.
The images provided as reference illustrate the application of these techniques. The original pre-baked images are processed to identify and segment various clusters, which are then analyzed for their potential glazing outcomes. By combining these computer vision techniques with robust machine learning models, we can create a system that predicts the final appearance of a ceramic piece with high precision. This integration of technology into the ceramics process not only enhances the efficiency of production but also allows for greater artistic control. Artists and designers can visualize the end result before the piece is even placed in the kiln, making informed adjustments to their methods. This predictive capability marks a significant advancement in the field, bridging the gap between traditional craftsmanship and modern technology, and ensuring that every piece that emerges from the kiln meets the desired aesthetic and quality standards. An important aspect that could be added to the data being embedded to every single piece could consist of the utilization of Computer vision and machine learning for piece identification. This could speed up the production process while allowing a type of intelligence to allow robots to become autonomous and become more efficient during time.
Conclusion
Glazing Virtuoso represents a transformative project aimed at advancing the spray glazing industry by bridging the gap between human craftsmanship and robotic precision. Through the integration of advanced technologies and collaborative human-robot interaction, this initiative not only enhances artistic freedom but also establishes new standards in architectural and artistic fabrication. The projects showcased serve as a foundational step towards this future, underscoring our dedication to innovation and quality. We are pleased with the results achieved thus far and envision that with adequate resources and support, Glazing Virtuoso has the potential to revolutionize the creative landscape. It promises unparalleled capabilities and the fostering of limitless creativity in the realm of spray glazing and beyond, ushering in a new era of possibilities for artists and designers alike.
