
Course Overview
The MRAC Applied Theory III course focuses on the exploration of collaborative robotics through the lens of ( MAS ) Multi-Agent Systems, in which different components of the system work autonomously and collaborate in order to execute complex tasks. The course investigates how digital and physical bots , operate within a shared environment with a mutual awareness in order to accomplish collective goals. The curriculum aims to encourage students to develop a framework of MAS in robotic systems.
Assignment Objective
The assignment requires students to produce a comprehensive presentation that demonstrates an example of collaborative robotics within a multi-agent system framework. In the current presentation the example will be a metal rod bending process with the assistance of a robotic arm, an end effector and a feeder. The deliverable must articulate the design of the beforementioned system and describe the critical reflection of MAS which includes the analytical phase, synthetical phase and approach and outcomes of that system.
Introduction :
The presentation outlines a Multi-Agent System ( MAS ) designed for a metal bending process. The presentation also demonstrates the application of MAS principles by addressing :
- Environmental properties
- Agent Roles
- Error Correction
- Decentralized Architecture
In order to define the Framework of a Multi-Agent System, we need to develop a critical reflection of that system, through 3 phases (analytical phase, synthetical phase and approach and outcomes) that consist a number of questions.
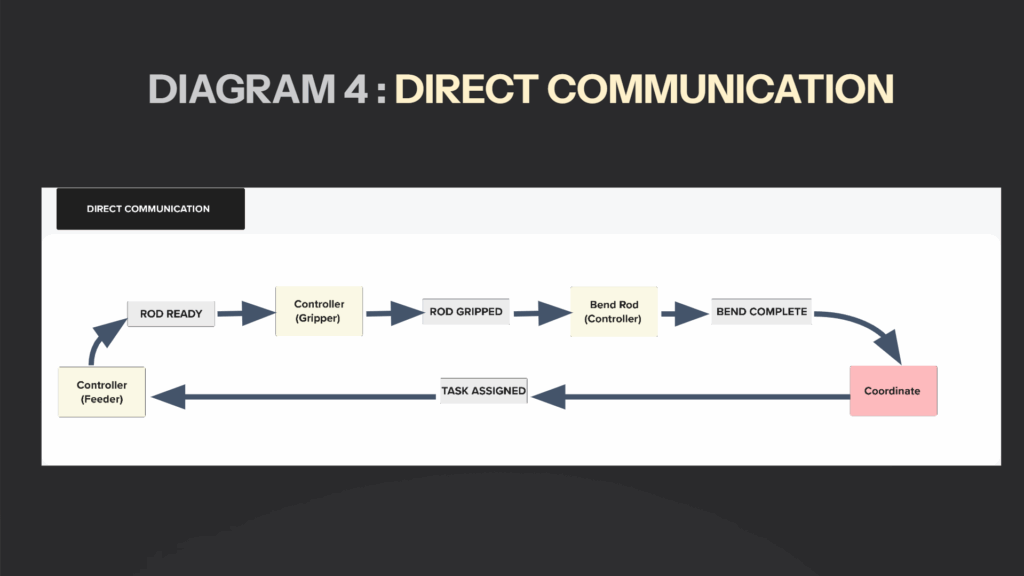
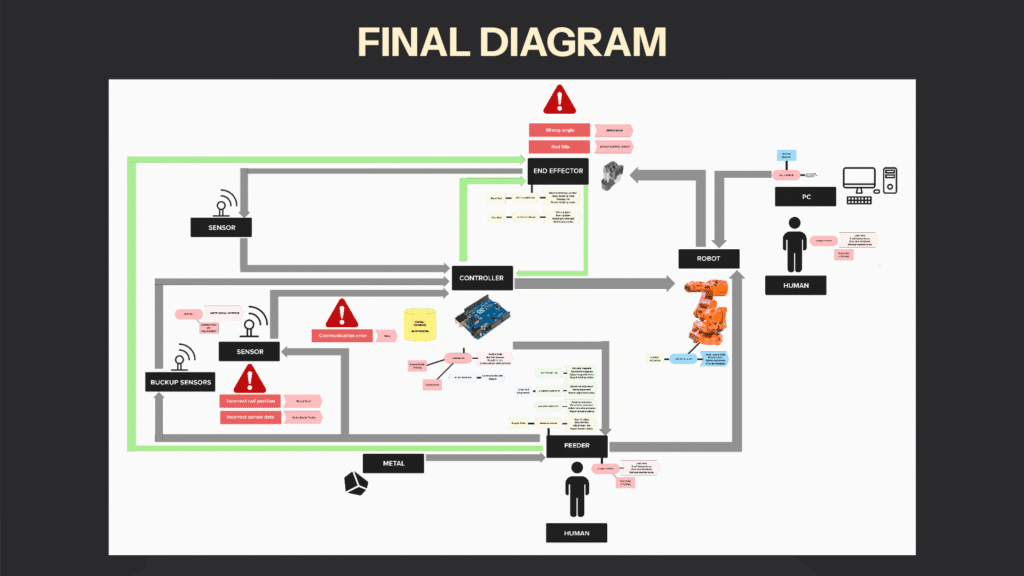
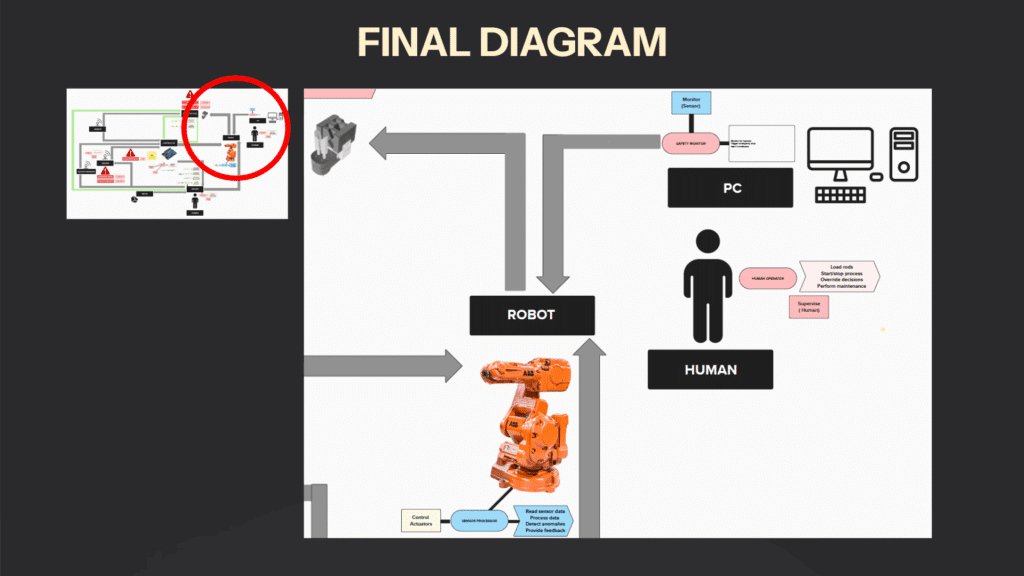
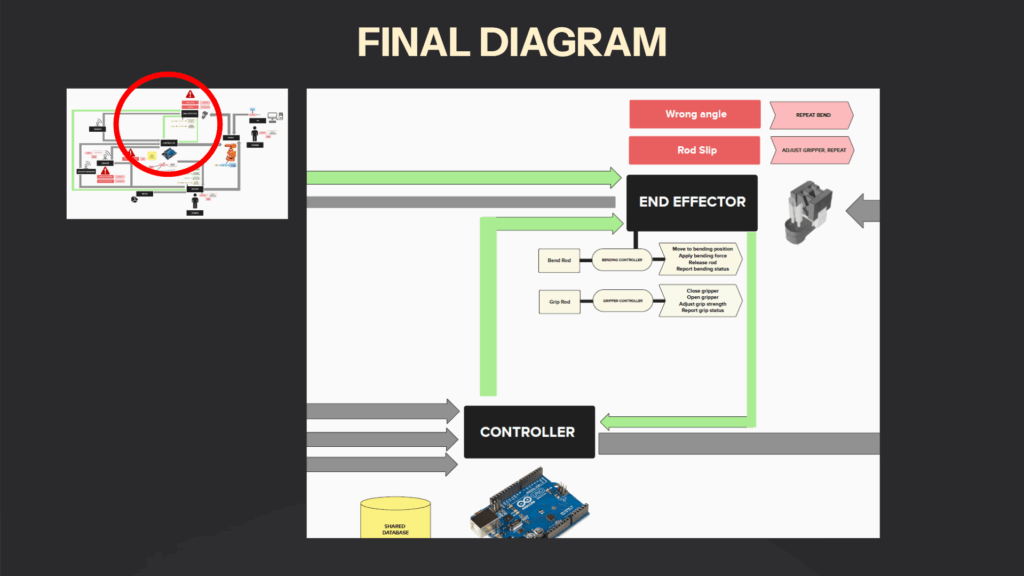
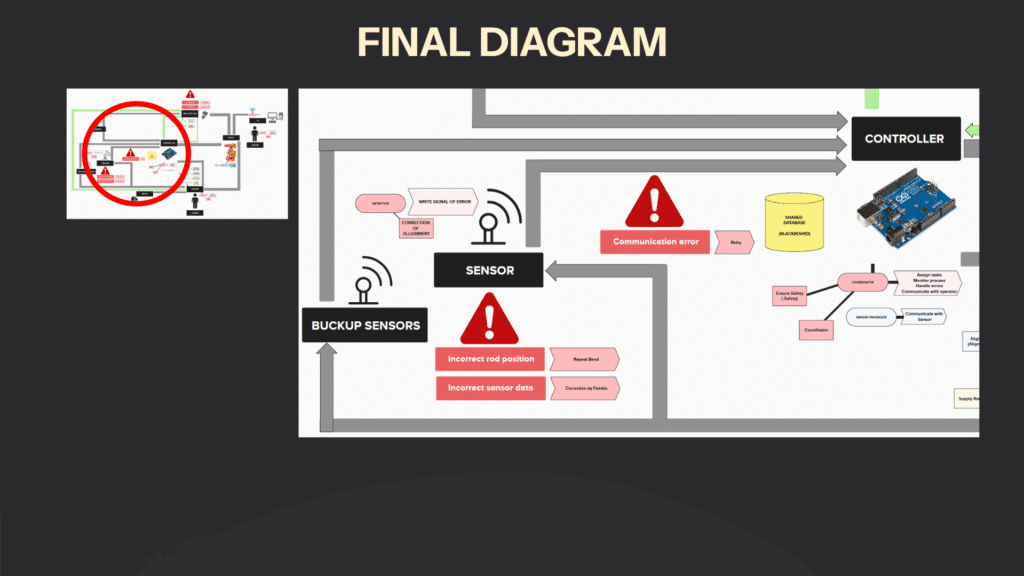
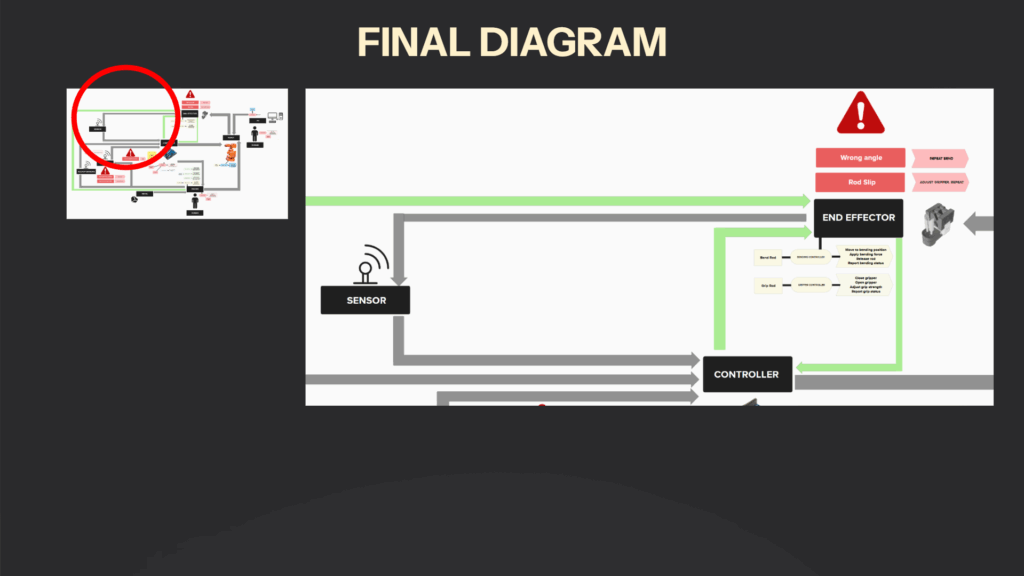
In addition the presentation outlines with a number of visual representation though diagrams the relationships of Agents with their Roles, Actions, Databases, Goals, Direct Communication. In the end all those relationships and conRonections are includes in one Final Diagram in which the possible errors of the system are also included.
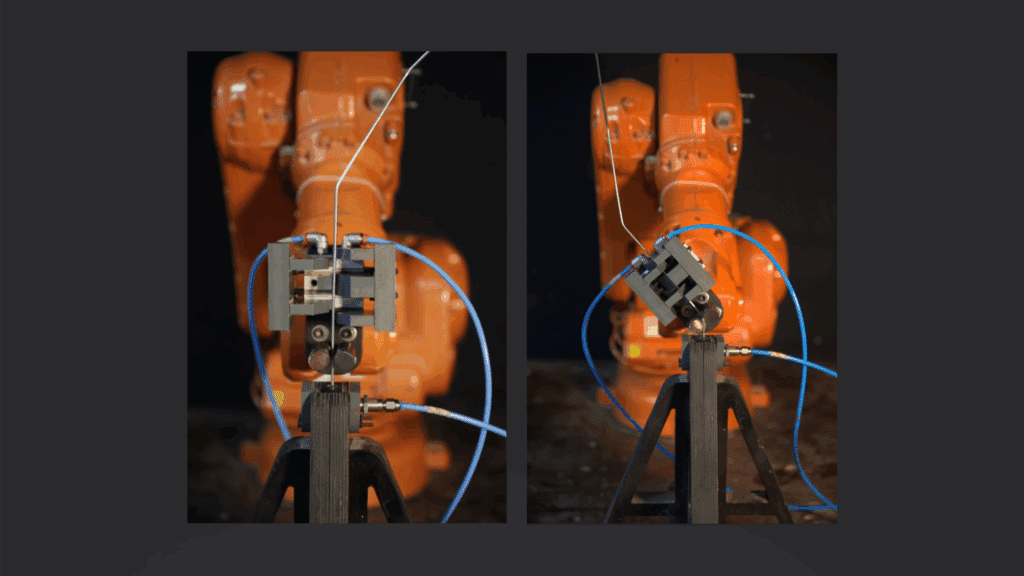
Robotic Process :
The current metal bending process includes a feeder that stabilizes a metal rod, an end effector that grips and bends the metal rod and a robotic arm that manipulates the material with a rotation motion. In the context of MAS a number of Agents can monitor and give feedback on the metal bending process .
Why use MAS ?
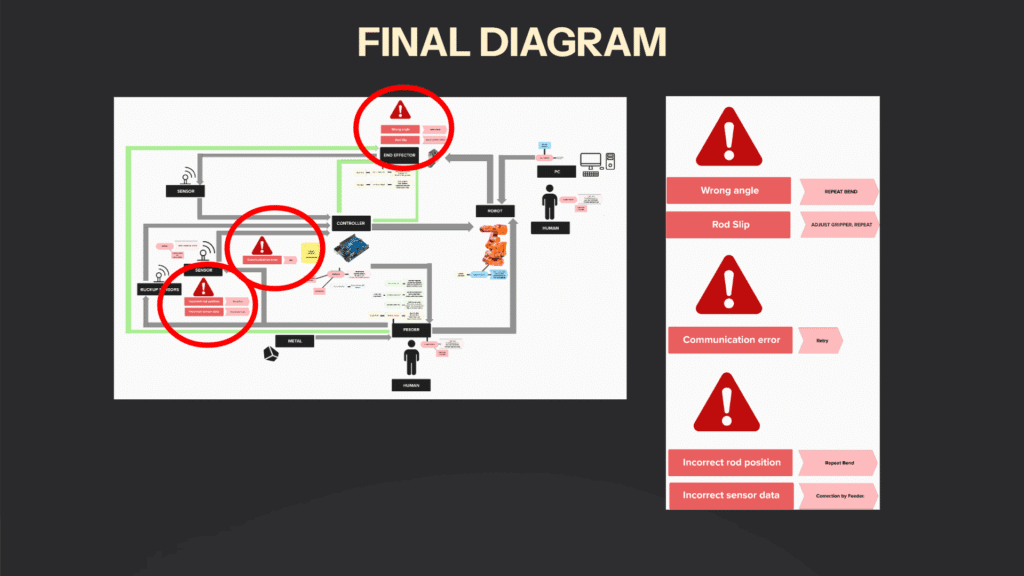
First and foremost let’s highlight some key points for the use MAS in the current application. The process includes a decentralized cooperation, autonomous error adaptation and sensor-based feedback in order to manage possible errors like misalignment of the material. By clarifying the key points of MAS in robotic metal bending we focus on the system’s core functionalities.
Next in defining the framework, it is crucial to take into consideration the possible errors that may occur in the system, in order to design it in a manner, that prevents future challenges.
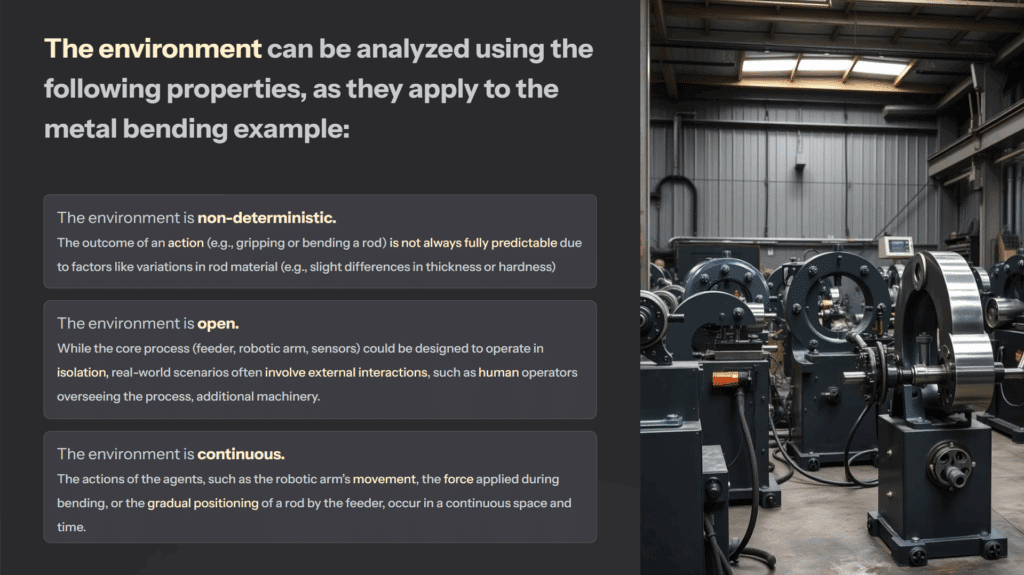
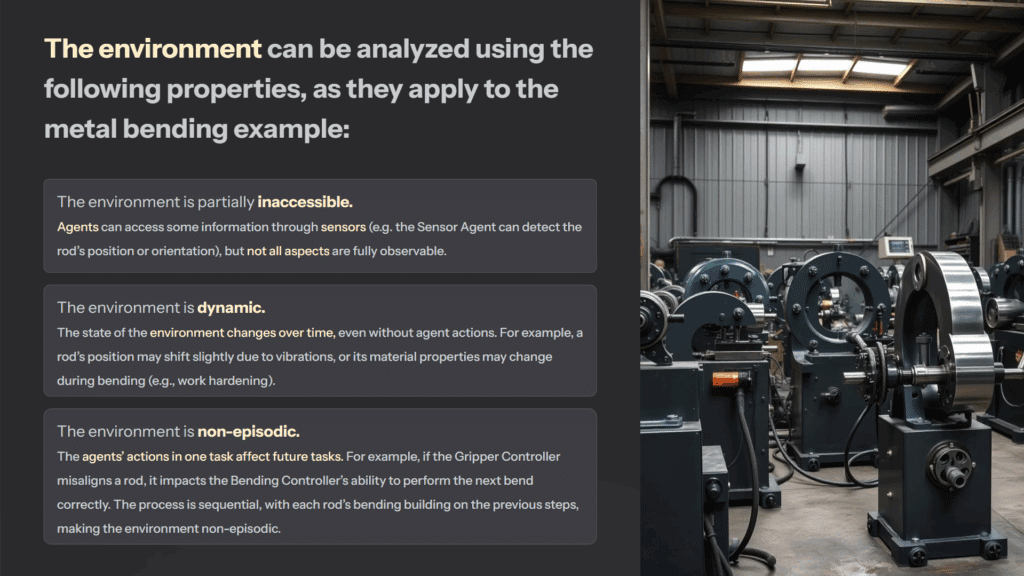
Environmental Properties :
The environment can be analyzed using the following properties, as they apply to the metal bending example.
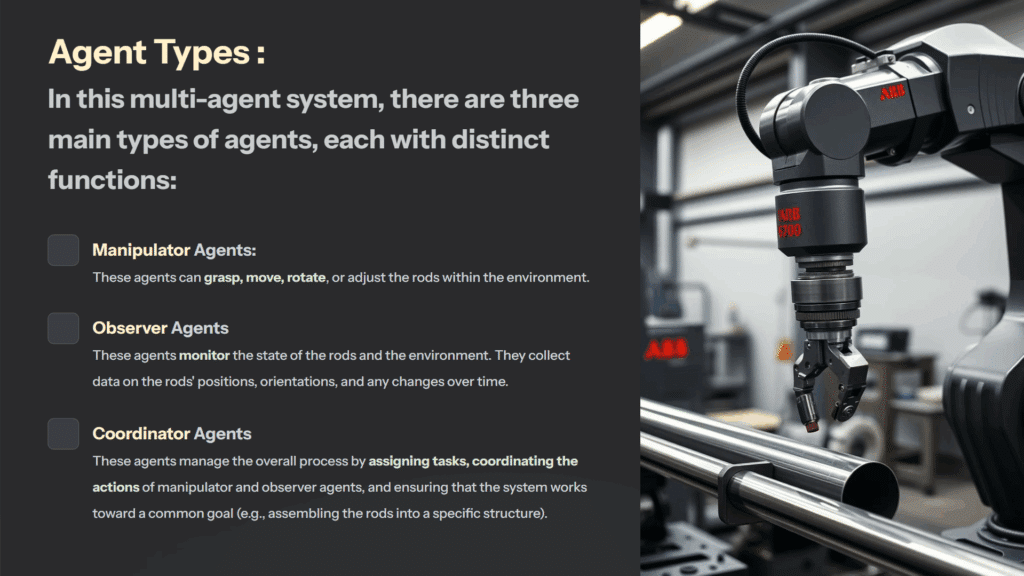
Agent Types :
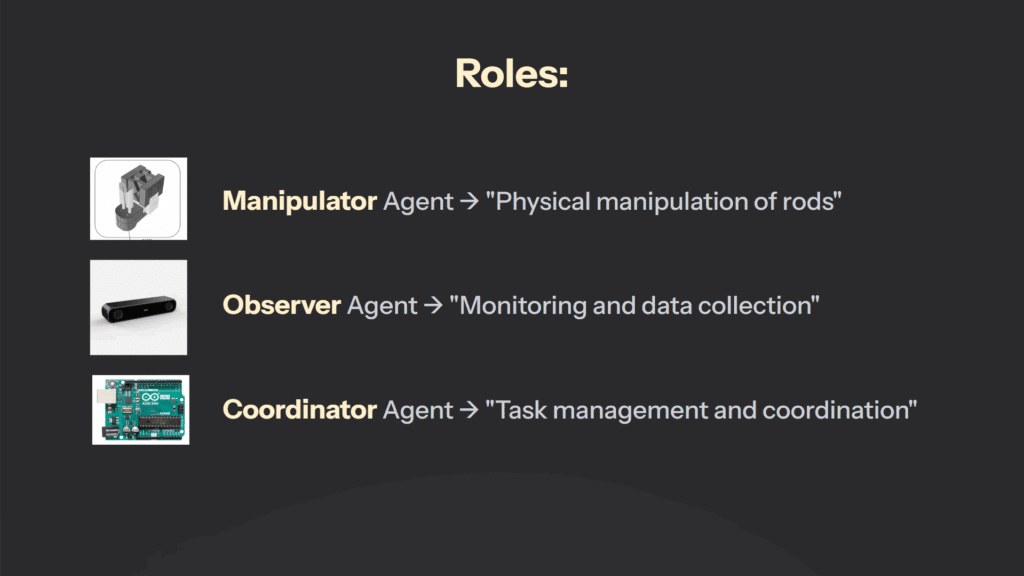
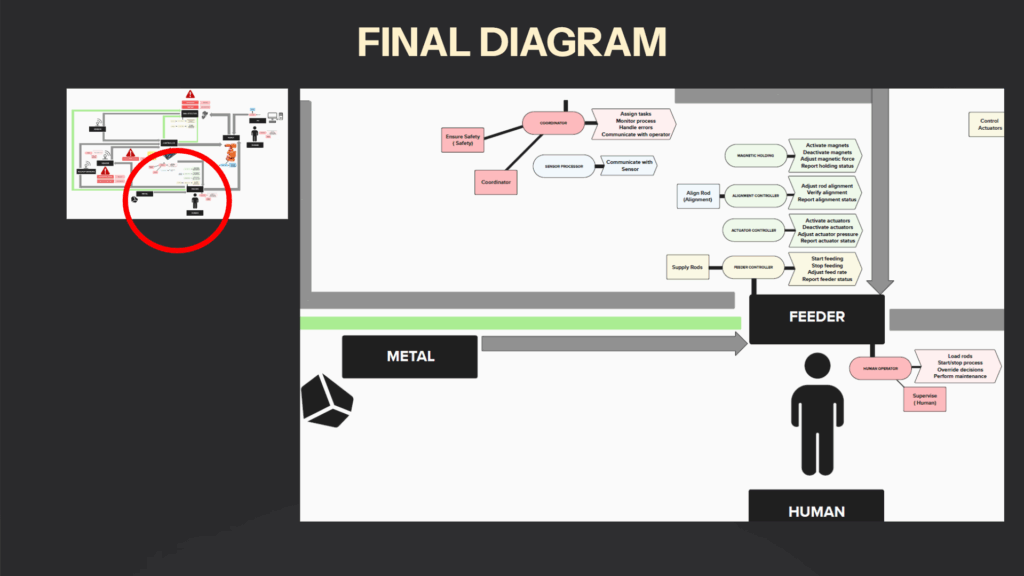
he robotic metal bending process involves a decentralized MAS where Manipulator, Observer and Coordinator Agents collaborate in order to position, grip and bend metal rods. The definition of these Types are distinguishing their roles and distribute a variety of tasks.
Architecture :
The architecture of the beforementioned system emphasizes on the autonomy and collaboration of different agent which can be scalable with future updates.
Also the absence of a central controller emphasizes the system’s flexibility .
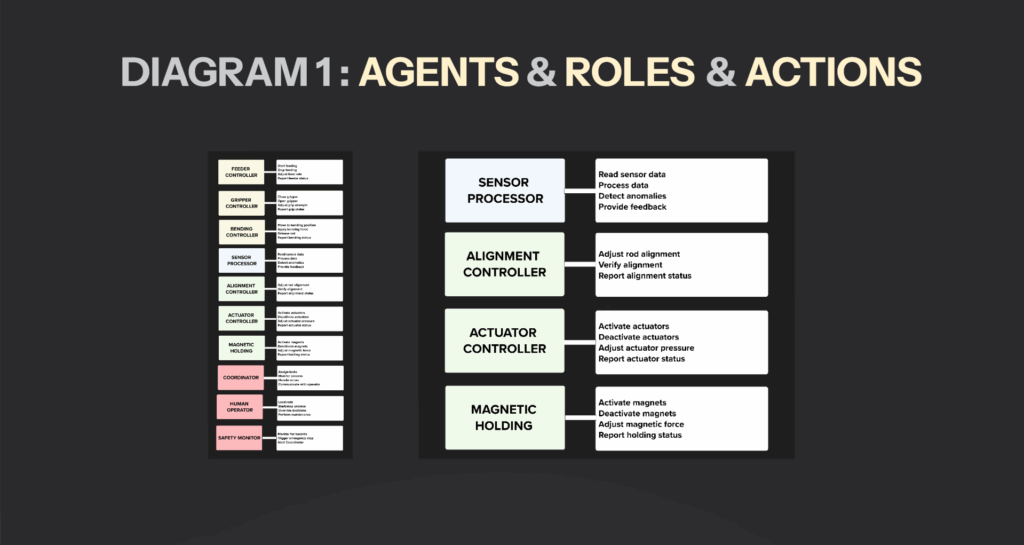
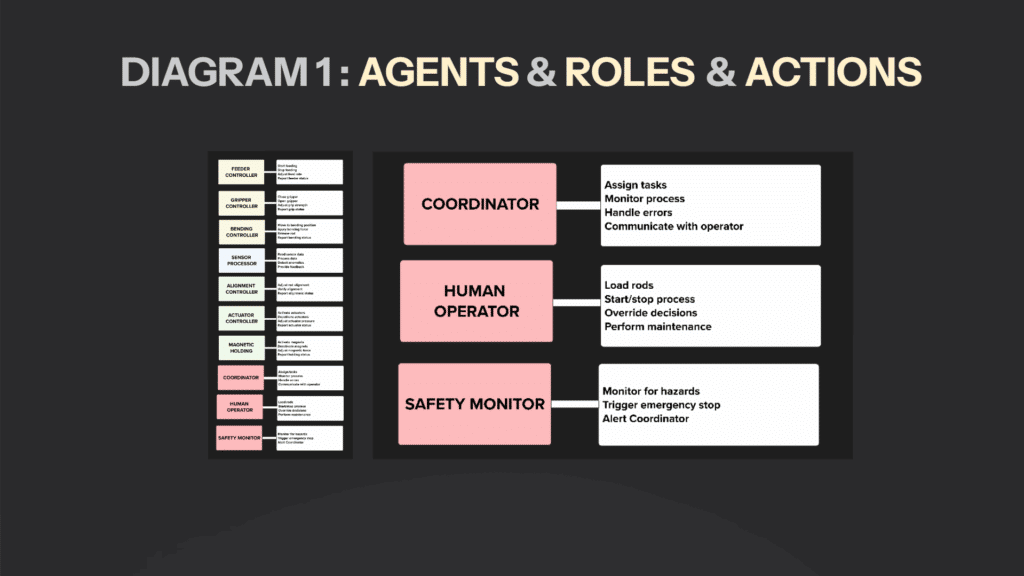
Roles :
The definition of the Roles of different Agents can clarify he distinct contributions of the Agents to the MAS.
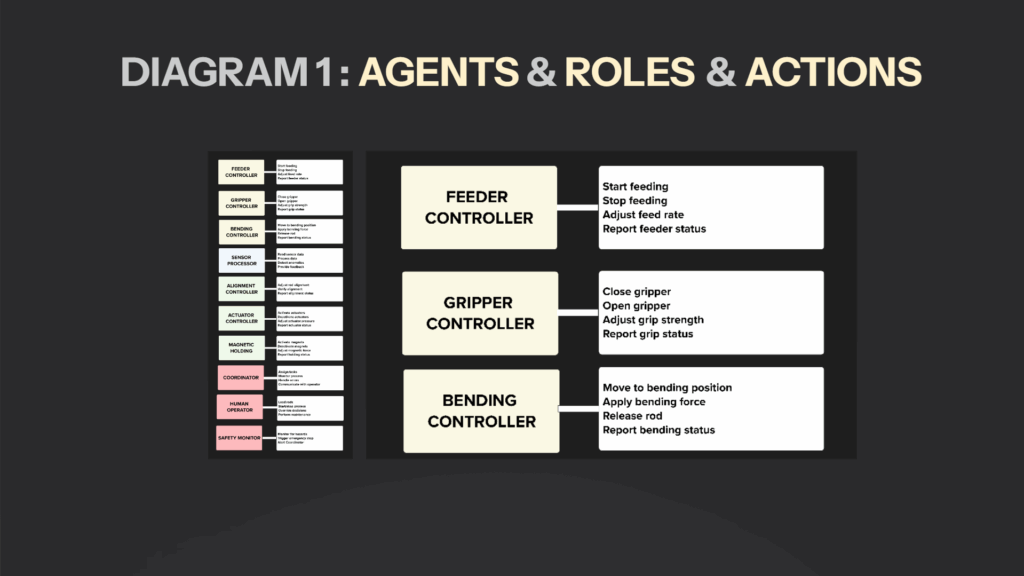
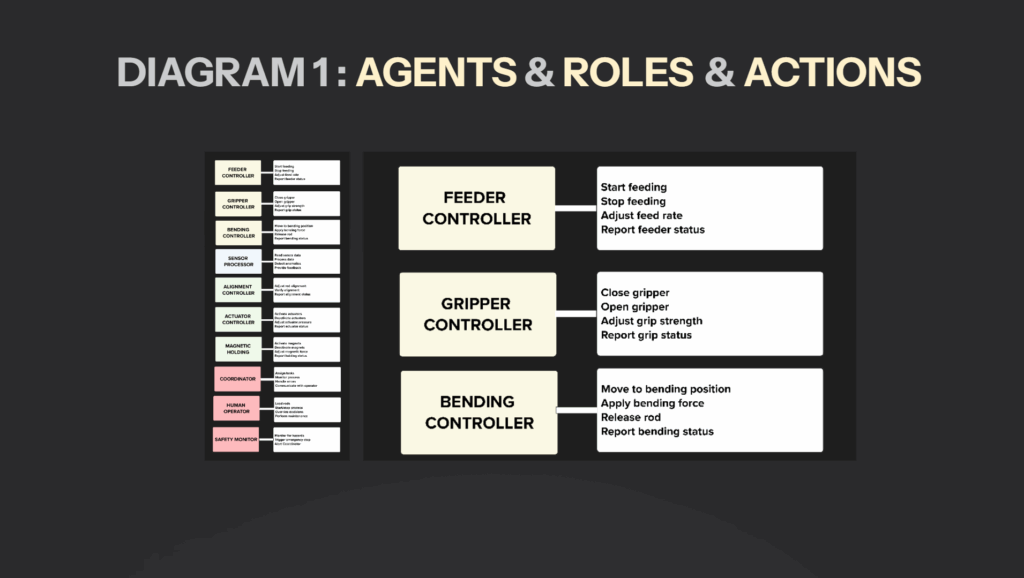
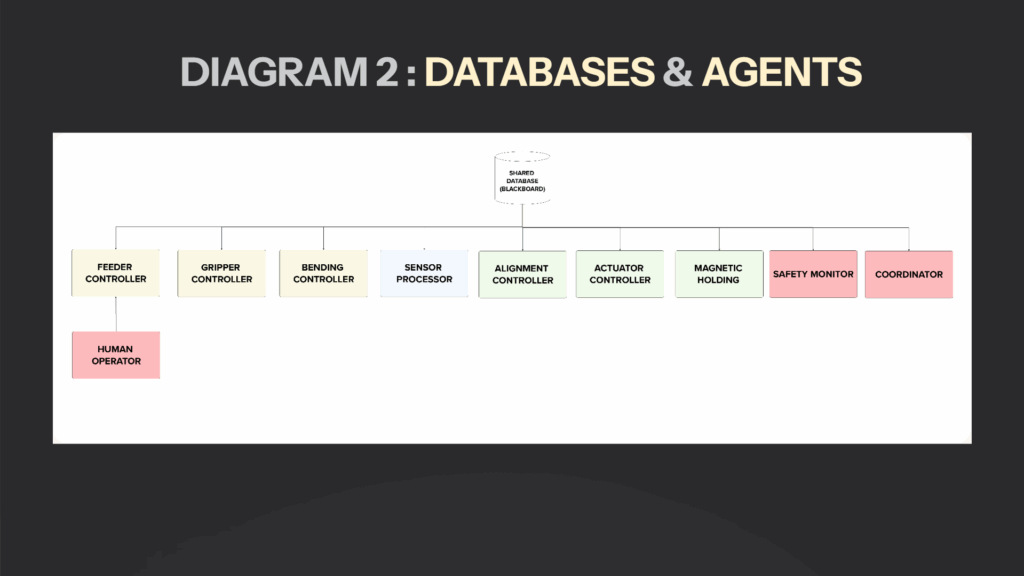
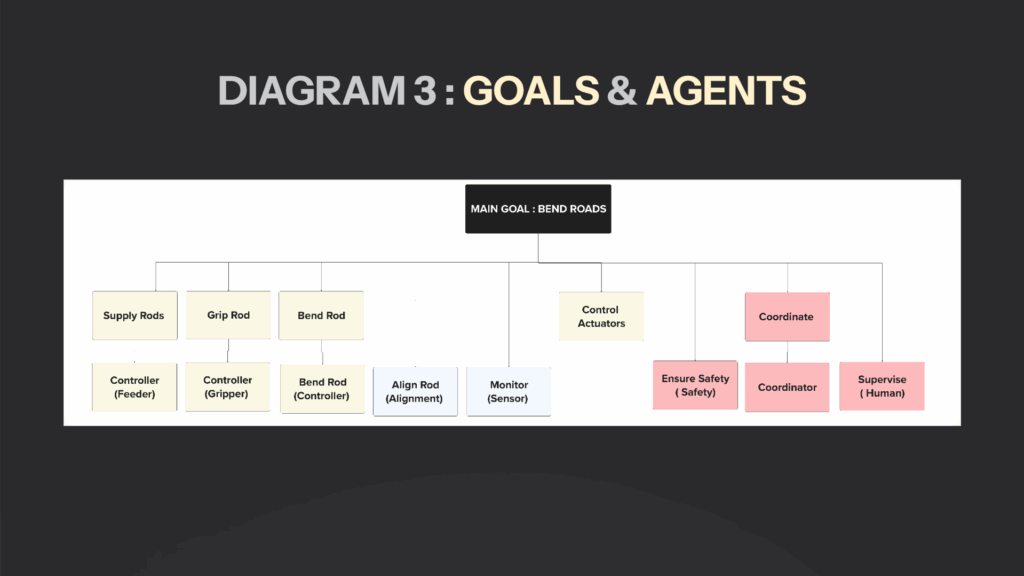
Diagrams :
The second part of the assignment includes the visual representation of the relationships and connections between the agents that include their roles, actions, databases, goals and direct communication. Conclusively all the diagrams of the MAS and it’s connections will be included in one Final Diagram.
Conclusion
The current course and presentation aligns with the critical understanding of collaborative robotics in the context of robotic metal bending by analyzing the connections of a MAS Framework with a number of diagrams that showcase the base for the development of a human-machine collaboration. The robotic metal bending process involves a decentralized MAS where Manipulator, Observer and Coordinator Agents collaborate in order to position, grip and bend metal rods. Through sensor feedback the MAS system provides error correction on a dynamic human=machine collaboration.
Acknowledgments:
Ana Cocho for exploring together the MAS universe.
Grok AI BY xAI for synthesizing research on Multi-Agent Systems.
Gamma AI for creating a visually compelling presentation.
