Introduction
The “Anatomy of a Machine” project marks the beginning of our exploration into the interplay between human and robotic gestures in creating art. This exercise, undertaken as part of the MRAC first term studio, encouraged us to delve into the fundamental properties of brush strokes, from manual experimentation to robotic automation. Over three weeks, we learned to study the dynamics of paintbrushes, analyze hand gestures, and translate them into robotic movements. The goal was to explore the anatomy of robotic painting and capture its distinct essence through a final painting and vectorial drawing.
Development
Phase 1: Manual Testing
We began by experimenting with paintbrushes manually. Tests 1 through 6 involved applying different amounts of pressure and varying our hand movements to understand how these factors influenced the stroke. These initial studies taught us how brush flexibility and paint viscosity interacted, laying the foundation for translating these principles into robotic movements.
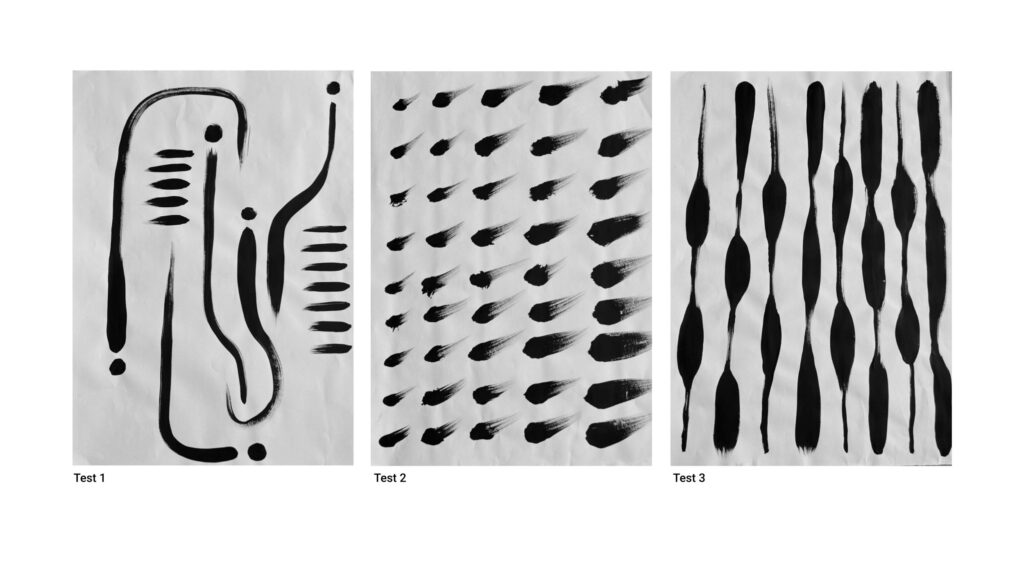
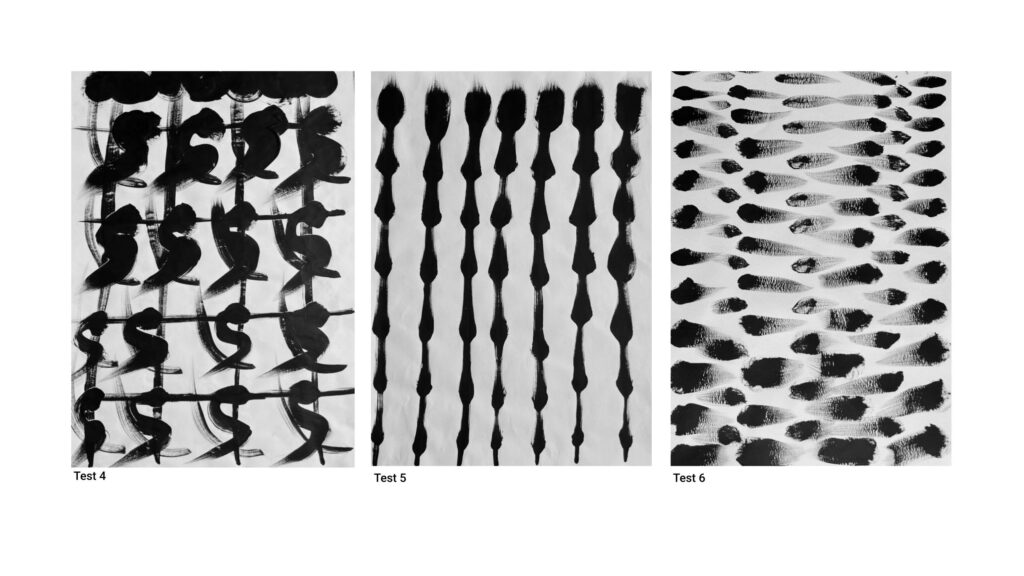
Images: Tests 1-6
- Test 1: Explored fluid gestures and flowing patterns.
- Test 2: Focused on pressure variation and creating tapering effects.
- Test 3: Studied repetitive and consistent forms, like dots and elongated shapes.
- Test 4-6: Expanded to complex patterns, layering strokes, and experimenting with directional shifts.
Phase 2: Introduction to Robotics
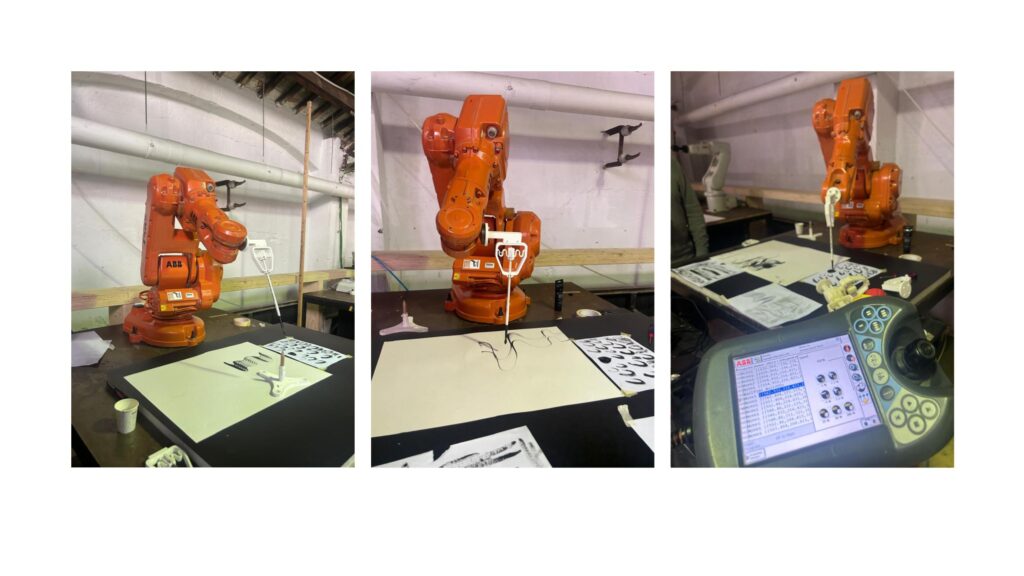
In the second phase, we learned how the ABB robots functioned, starting with programming simple trajectories. Using software like Grasshopper, we mapped basic movements and translated these into robot-drawn lines. The initial experiments involved replicating hand-drawn gestures to understand the robot’s articulation and stroke consistency.
Phase 3: Designing the Final Output
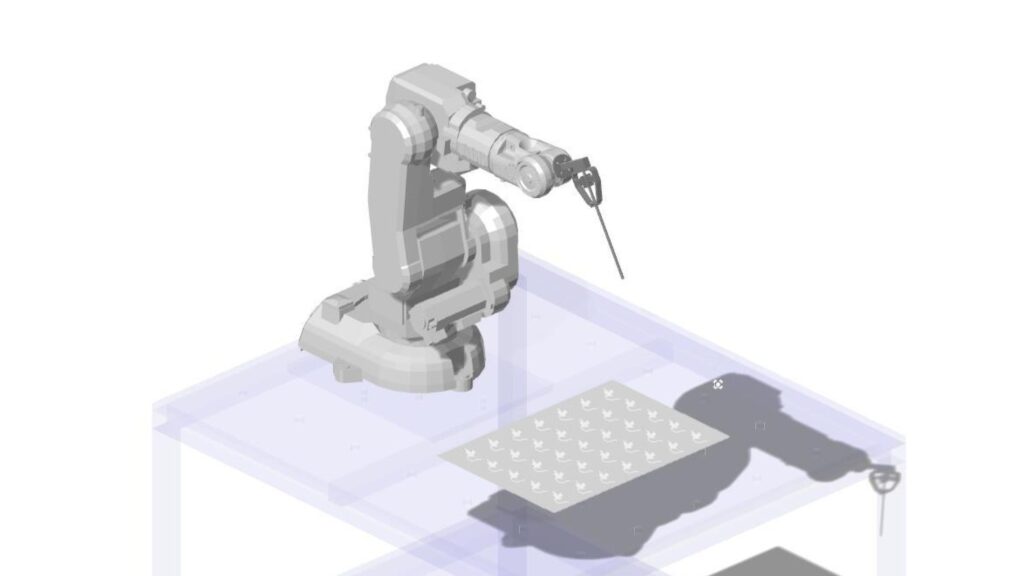
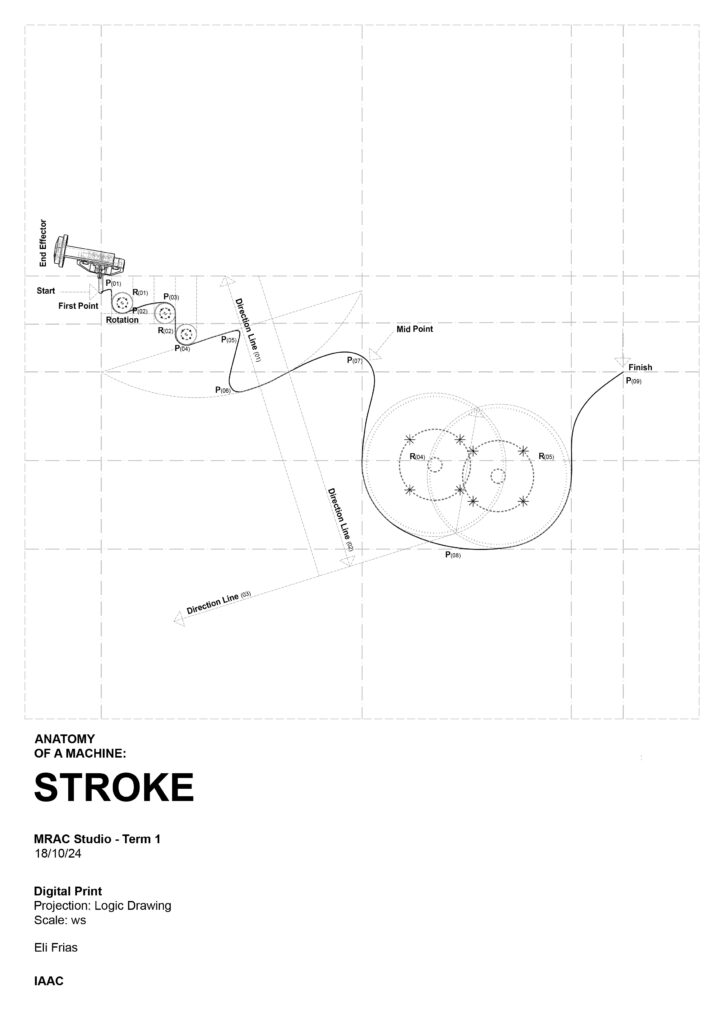
Using insights from the manual tests and initial robotic experiments, we moved to creating a final design. We used Grasshopper to model a vectorial path based on a specific artistic concept. This vectorial path was designed to highlight the anatomy of the robot, including its rotational axes, articulation, and reach.
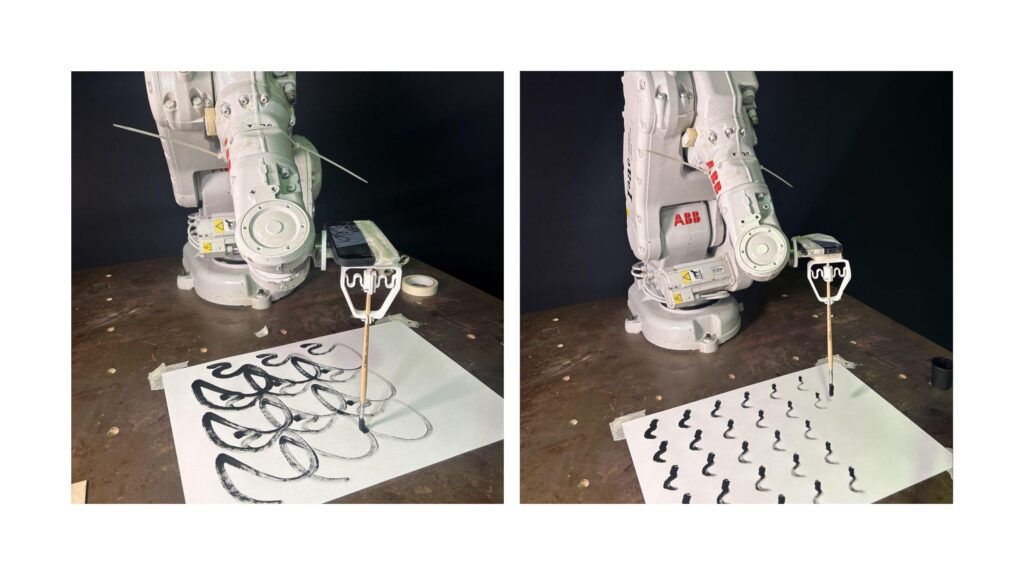
The design was transferred to the larger white ABB robots for the final tests. The robot replicated the vectorial path on a canvas using a brush mounted on a custom tool holder.
Results and Conclusion
This exercise highlighted the symbiotic relationship between manual and robotic processes. By understanding and leveraging the robot’s anatomy, we transformed artistic intuition into precise, programmable movements. This exploration not only deepened our technical skills but also broadened our understanding of how machines can augment human creativity. As we move forward, these foundational learnings will serve as a stepping stone for more complex experiments in robotic fabrication and art.