Initial drawing explorations
Mapping Human Gesture to Robotic Logic
Introduction
The first assignment of Anatomy of a Machine explores a fundamental question:
How can a robot reproduce something as subtle, intuitive and continuous as a human brushstroke?
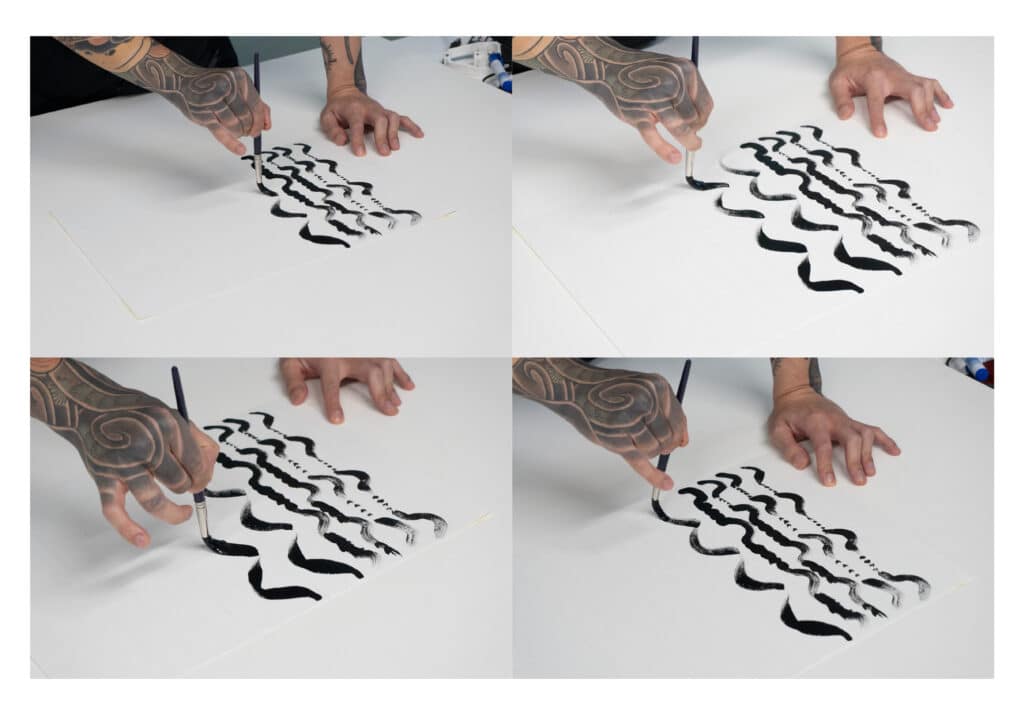
Before defining any toolpath, our goal was to momentarily step away from machines and instead observe our own hands as machines. Through a series of analog drawings—varying in pressure, angle, speed and ink density—we attempted to decode the micro–gestures that form a brushstroke. These strokes became the first layer of “data”: an expressive, embodied record of motion that later would be translated into robotic logic.
This initial phase was not a search for aesthetic compositions; rather, it was an exercise in understanding motion as information. The robot’s axes, constraints and degrees of freedom would eventually interact with our gestures, but the process began with something simple: ink, paper, and movement.
Objective.
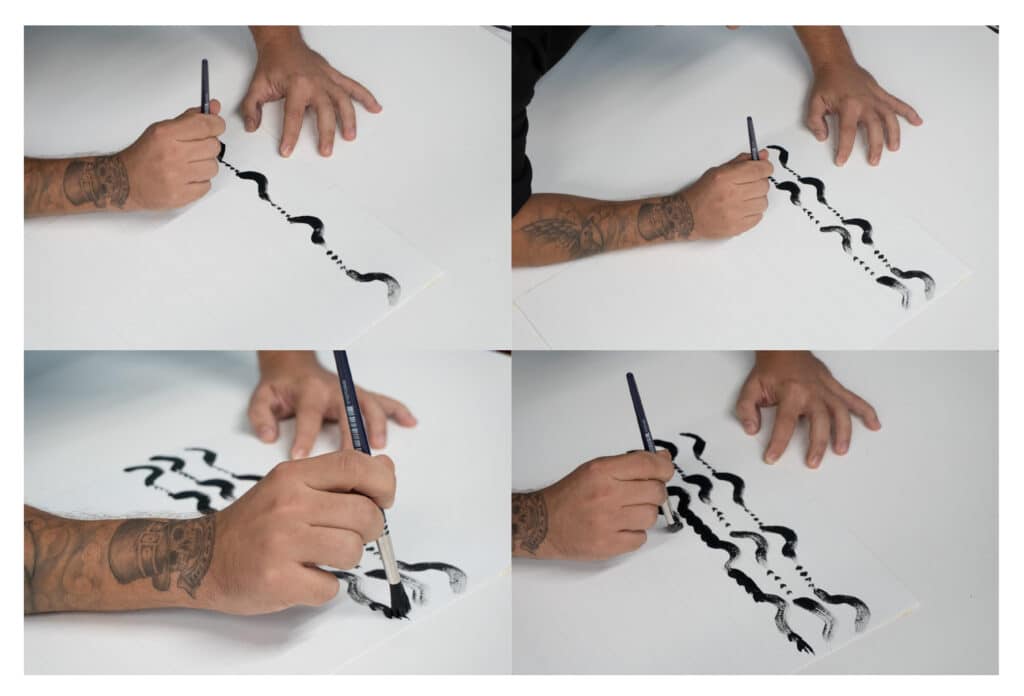
Hand drawing process
Processes.
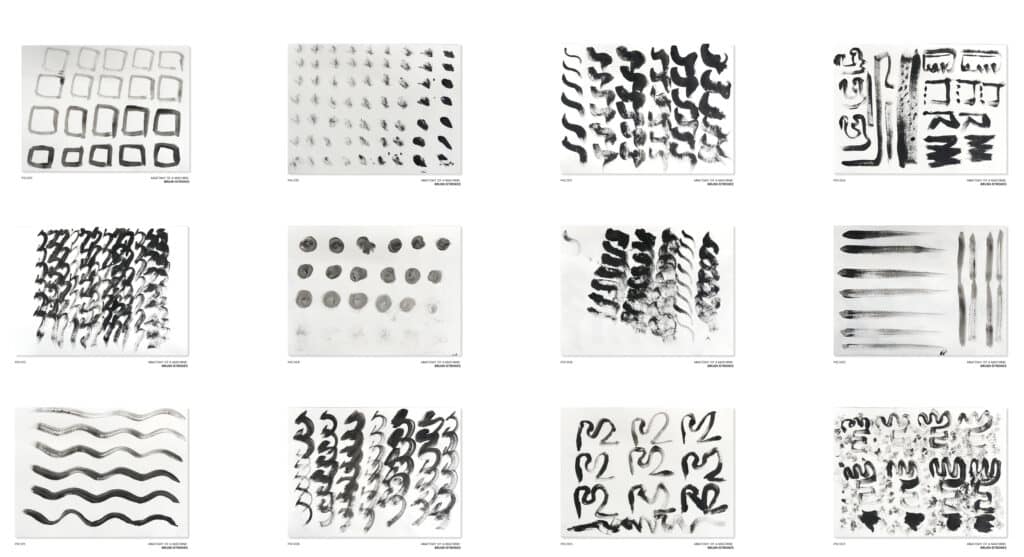
1. Hand-drawn strokes as analog data
The analog explorations produced a library of strokes—each containing implicit variables such as:
• Brush pressure (the depth and width fluctuations of the stroke)
• Brush angle (orientation shifts observable in tapering and curvature)
• Ink density (saturation patterns, fading, and stress points)
Through iterative drawing, we began to detect a pattern: every stroke carries a sequence of intentional decisions and micro-adjustments. These “decisions” later informed the categories we extracted in digital form:
path, start/end, stress point, direction change, slight line.
By diagramming these parameters, we framed each stroke not as an artwork, but as a motion dataset.
⸻
2. Translating gesture into toolpath logic
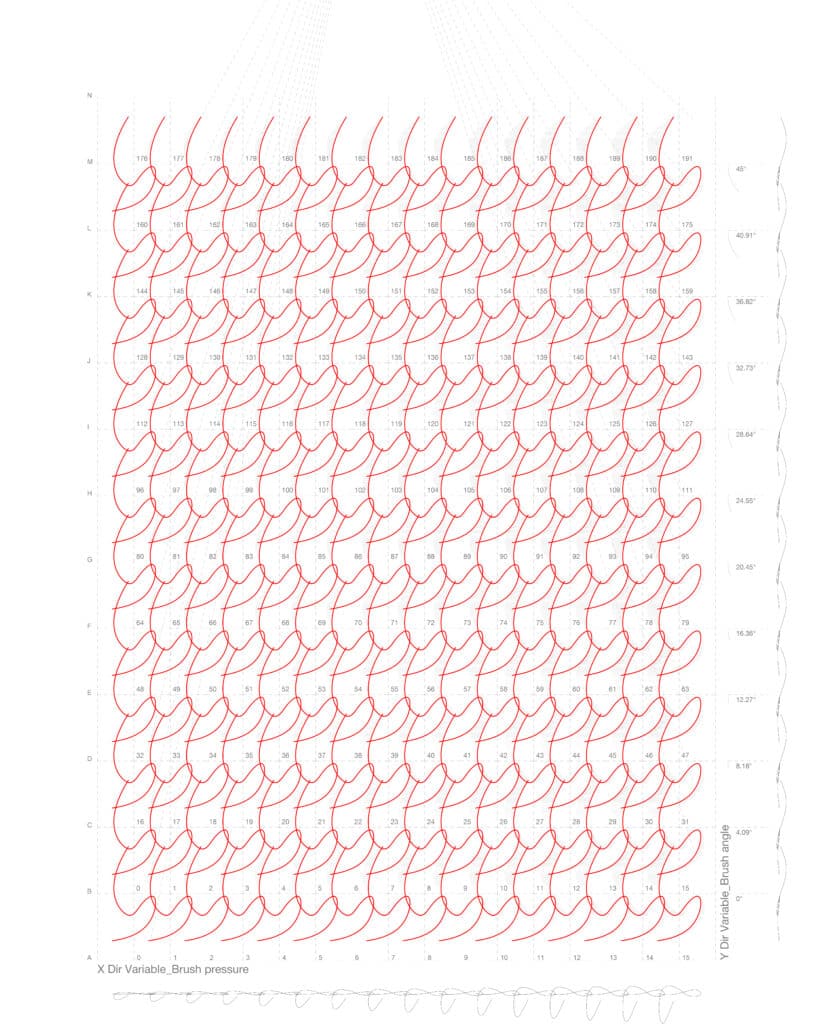
The next step was reconstructing these movements in Grasshopper, treating each analog stroke as an input curve whose behavior could be parametrically analyzed and rebuilt.
We developed a system around three key parameters:
1. Brush Pressure
Mapped to Z-axis displacement or extrusion thickness, simulating how a human hand increases or decreases force.
2. Brush Angle
Reconstructed as tangent or normal vectors along the curve, affecting orientation and rotation of the end-effector.
3. Ink Density
Interpreted as point frequency along the stroke—darker regions correlate to slower movement or repeated passes.
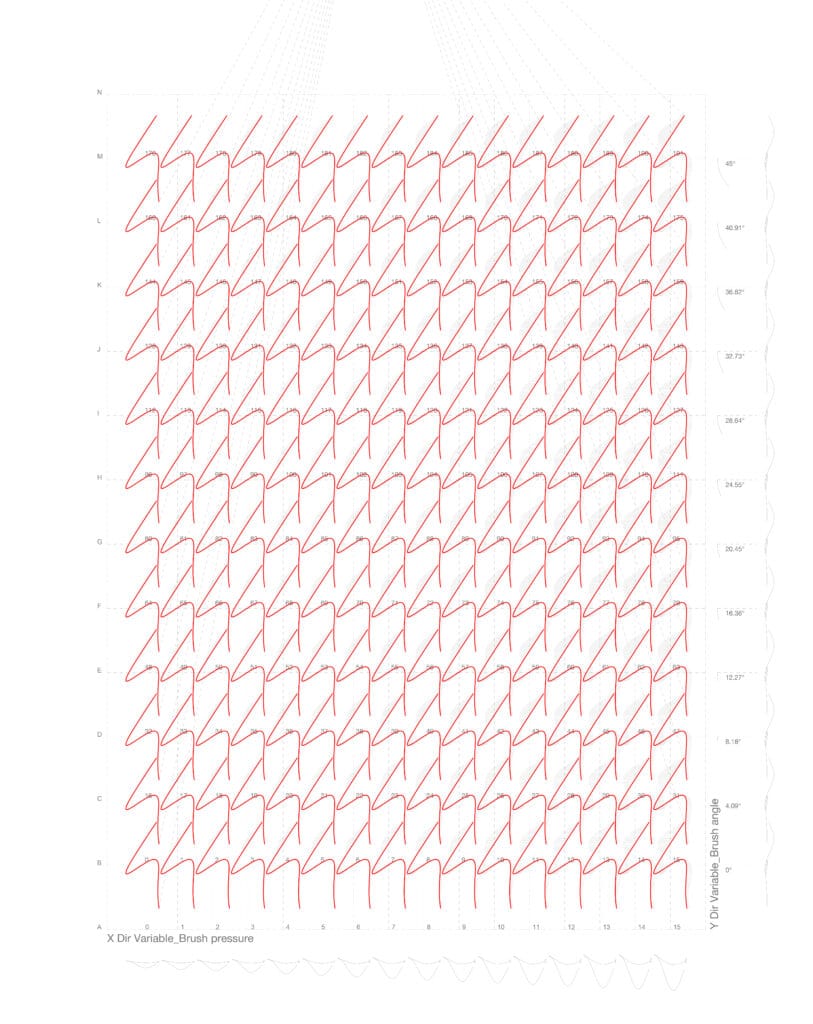
By using this framework, we created a matrix of strokes that varied along X (pressure) and Y (angle). The matrix became a controlled experiment: What happens when we slowly move from low-pressure strokes to high-pressure strokes? What patterns emerge when angle shifts are systematically altered?
This parametric exploration helped reveal a logic behind gestures that normally appear spontaneous.
⸻
3. Robot Simulation: From curve to choreography
Once the strokes were computationally abstracted, we used robot simulation to test robotic feasibility. Here, the hand and robot diverge:
• A human compensates intuitively for curvature and pressure.
• A robot requires explicitly defined constraints, velocities, and orientations.
Simulations made clear that even a simple stroke requires careful planning of:
• tool orientation relative to the canvas
• reachable workspace and safe robot posture
• continuous trajectory without unnecessary wrist flips
• correct mapping of brush pressure to vertical displacement or contact force
This phase demonstrated that a brushstroke is never “just a line” for a robot—
it is a choreography of coordinated axes.
Development
Conclusion.
The Strokes assignment allowed us to uncover the hidden anatomy of a gesture. By moving from hand-drawn expressiveness to digital abstraction and finally to robotic interpretation, we constructed a workflow where intuition and precision coexist.
What began as ink on paper evolved into:
• a structural understanding of motion
• a parametric system capable of controlling variability
• a robotic simulation that anticipates future fabrication steps
This exercise frames the robot not just as a machine that executes commands, but as a partner whose behavior emerges from decoded human intention. Strokes therefore becomes the foundation for the next stages of the course, where shaping material—whether brush, clay, or another medium—must be guided by this deepened understanding of motion and machine anatomy