Inspired by my personal experience, as a student in IAAC, there have been many times that I was carrying heavy materials and I was struggling to open the main door. Therefore, using the arduino program I wanted to make an automatic revolving door. When the Ultrasonic Distance Sensor detects an object from a specific distance, it enables the MicroServo and the door start revolving. Apart from this action, the Ultrasonic Distance Sensor sends signal to the Led Light and to the Buzzer component, which will be enabled when the object is detected. This will facilitate people that are carrying items and most importantly people with disabilities.
Concept Diagrams

Video/ Gif: Ultrasonic Distance Sensor detects object from a specific distance. Lights and Buzzer Alarm noise turn on.
Video/ Gif: Sensor sends signal to the MicroServo and the door starts revolving.
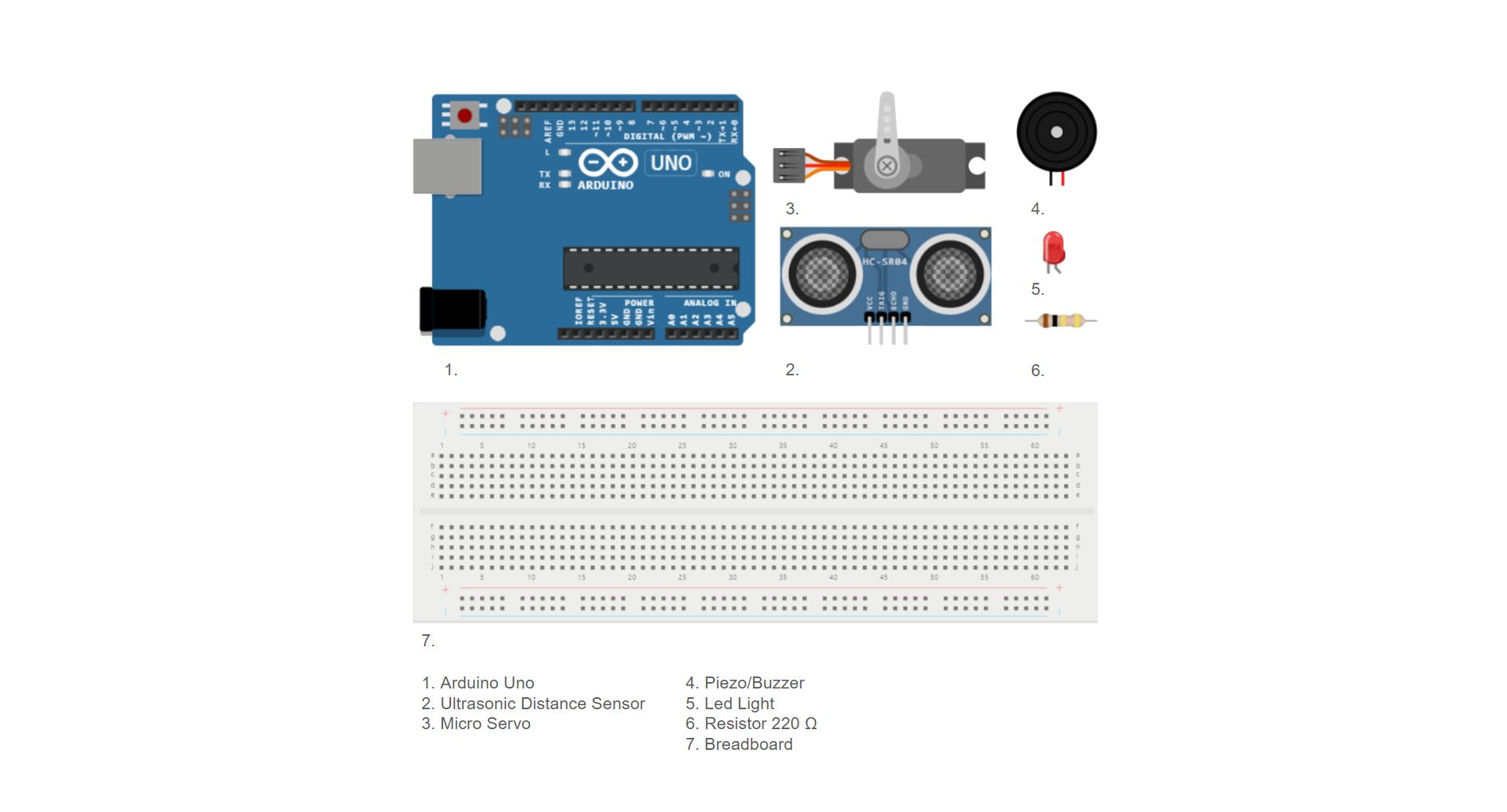
Bill of Materials
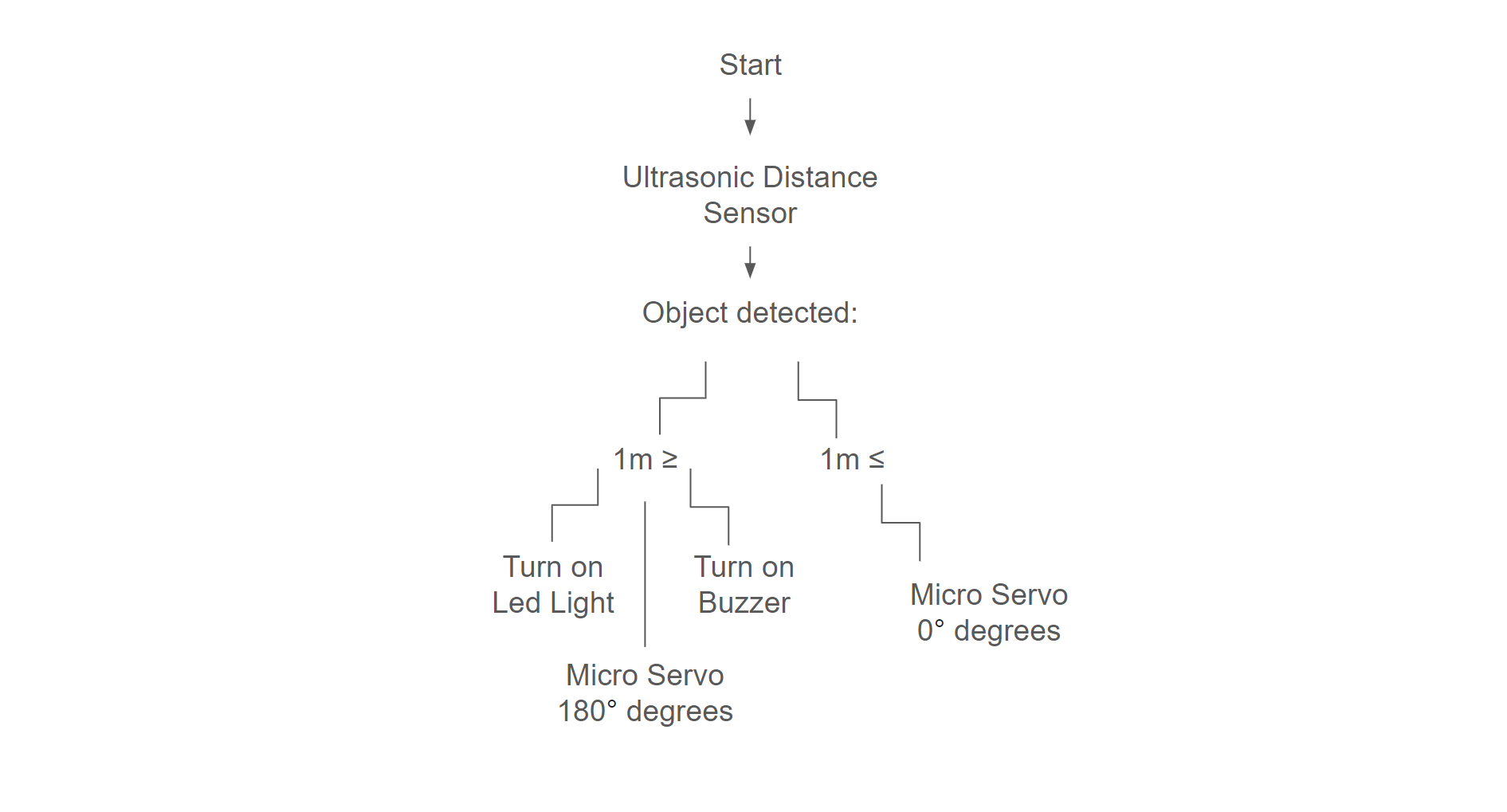
Code Logic
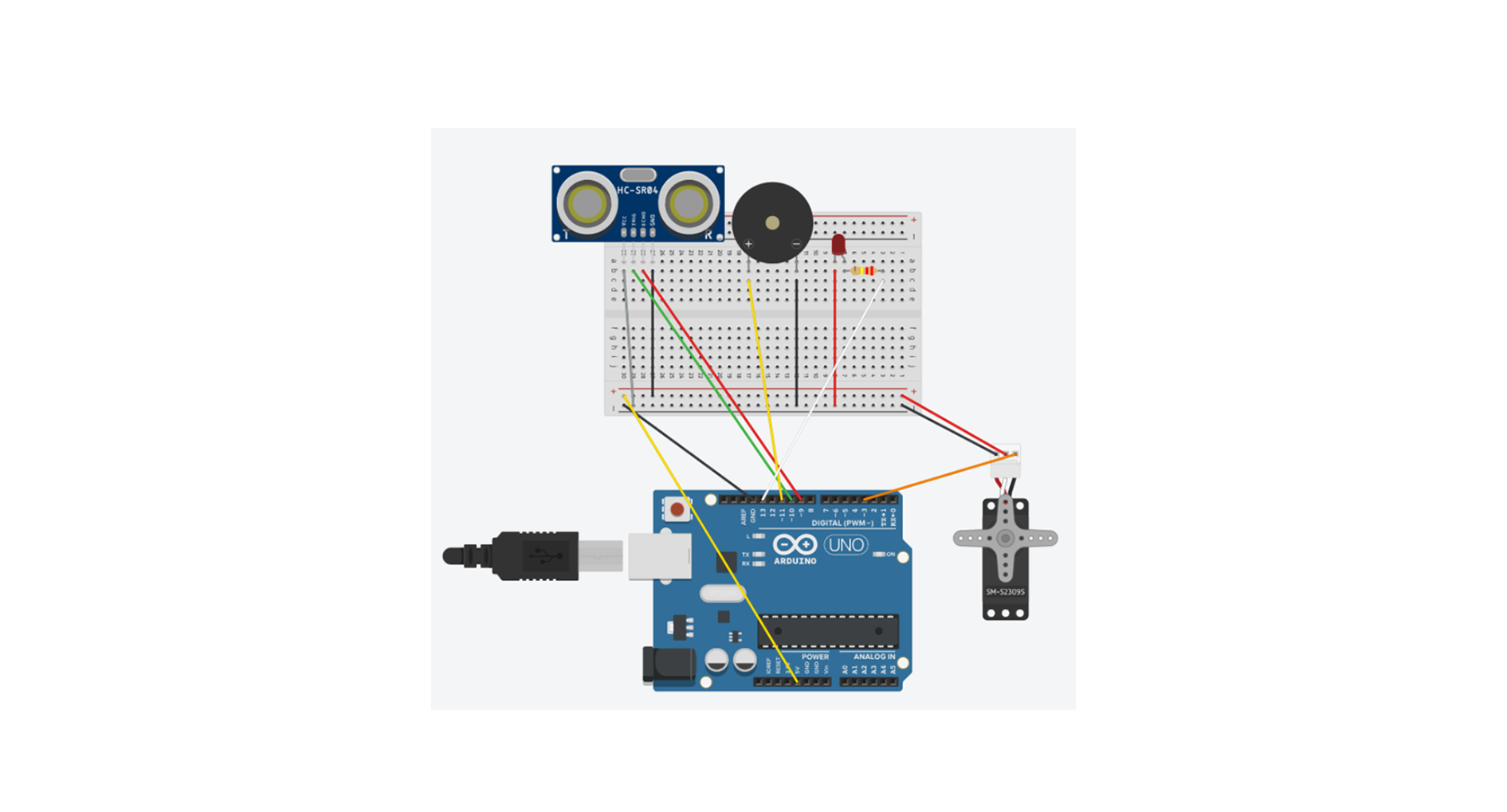
Assembly
Code
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int pos = 0; // variable to store the servo position
const int trigPin = 9;
const int echoPin = 10;
const int buzzer = 11;
const int ledPin = 13;
long duration;
int distance;
int safetyDistance;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(ledPin, OUTPUT);
myservo.attach(3);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance= duration*0.034/2;
safetyDistance = distance;
Serial.print(“Distance:”);
Serial.println(distance);
if (safetyDistance <= 10) {
digitalWrite(buzzer, HIGH);
digitalWrite(ledPin, HIGH);
myservo.write(0);
delay(100);
}else if(safetyDistance > 11) {
digitalWrite(buzzer, LOW);
digitalWrite(ledPin, LOW);
myservo.write(180);
}
delay (100);
}
Prototyping Videos
Next Steps
How can this prototype be enhanced and get adapted in futuristic parametric architectural projects?
Revolving Towers – Adapating my protoype to a futuristic project by replacing sensors, while maintaining the same logic
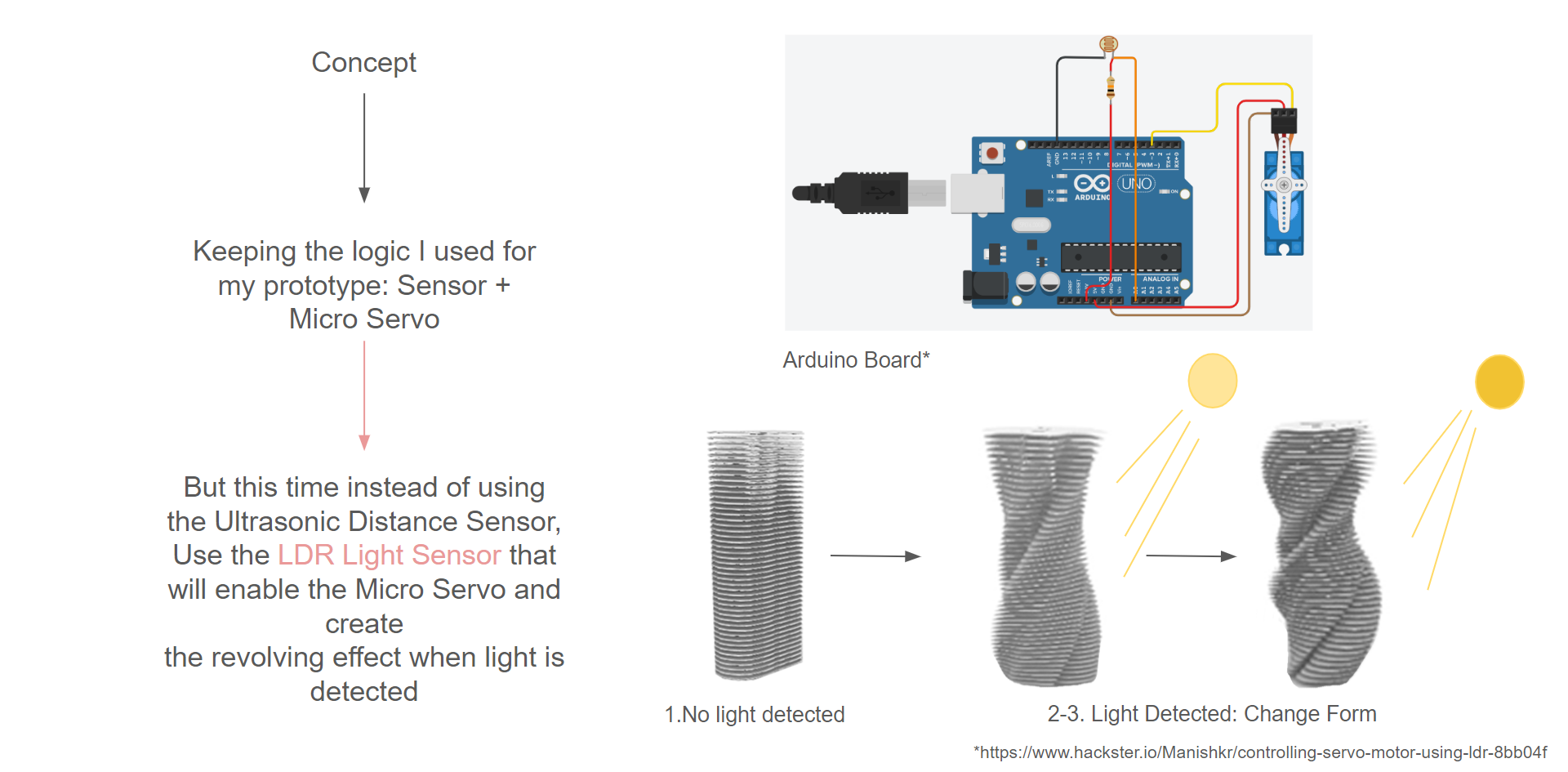
Schematic Render of my futuristic proposal: Revolving Towers