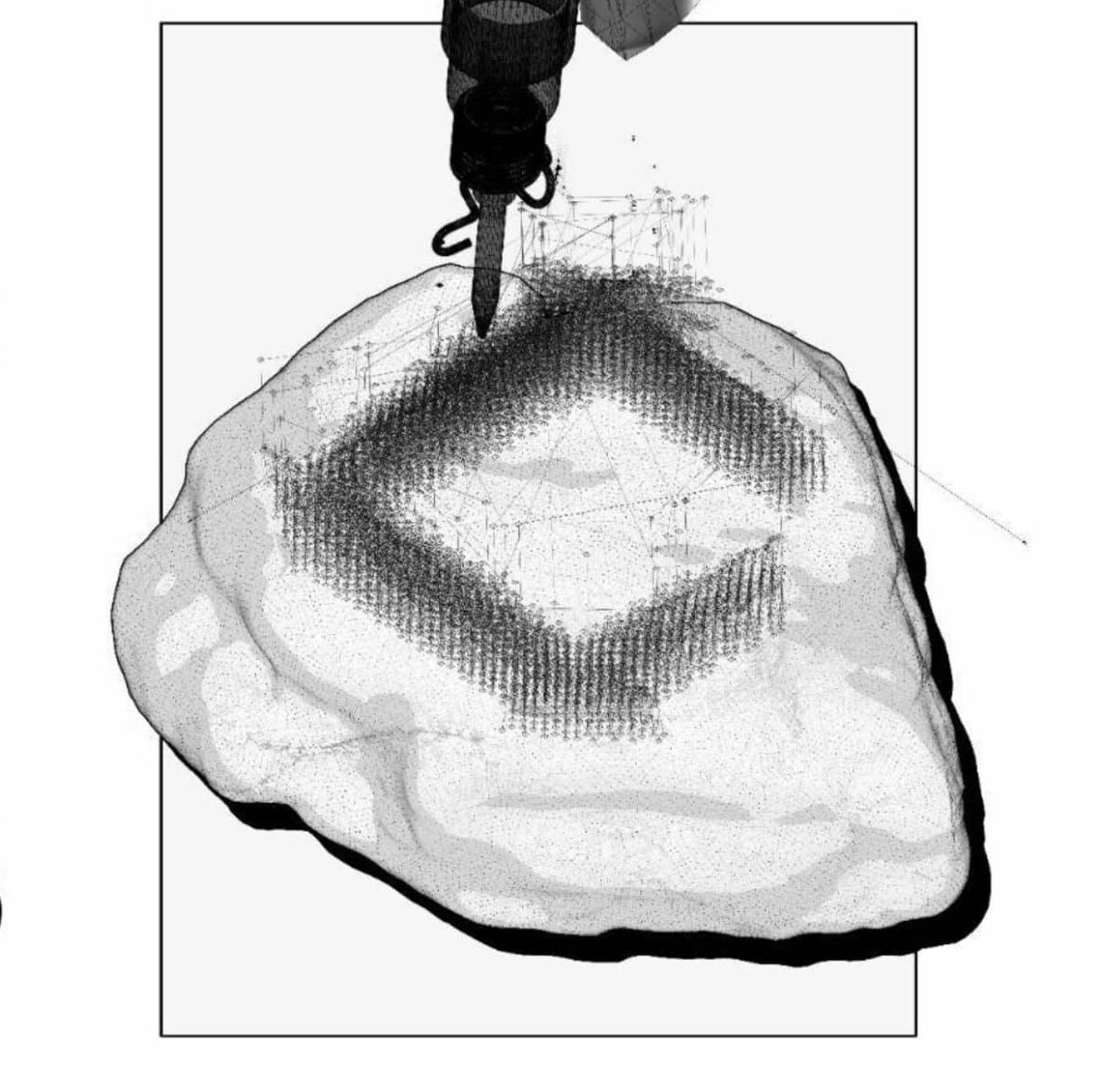
This course delivers a comprehensive introduction to the Robot Operating System (ROS), equipping students with foundational skills in robotic software development. Over the duration, participants delve into core ROS concepts, encompassing nodes, topics, messages, and services. The seminar will use robotic perception as case studies, students will discover how ROS bridges the robot, sensors and other hardware components. By the end of the course, students will explore how perception data can participate and change the architecture design-to-fabrication workflow.
Learning Objectives
At the course completion, students will learn:
-
- ROS Fundamentals: Gain a basic understanding of the Robot Operating System (ROS), its architecture, and its role in robotics and communication between hardware systems.
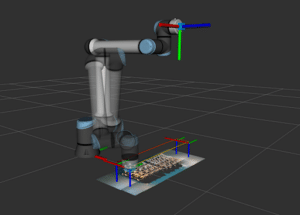
- Key ROS Tools: Become familiar with essential ROS tools for data visualization, node graph and simulation.
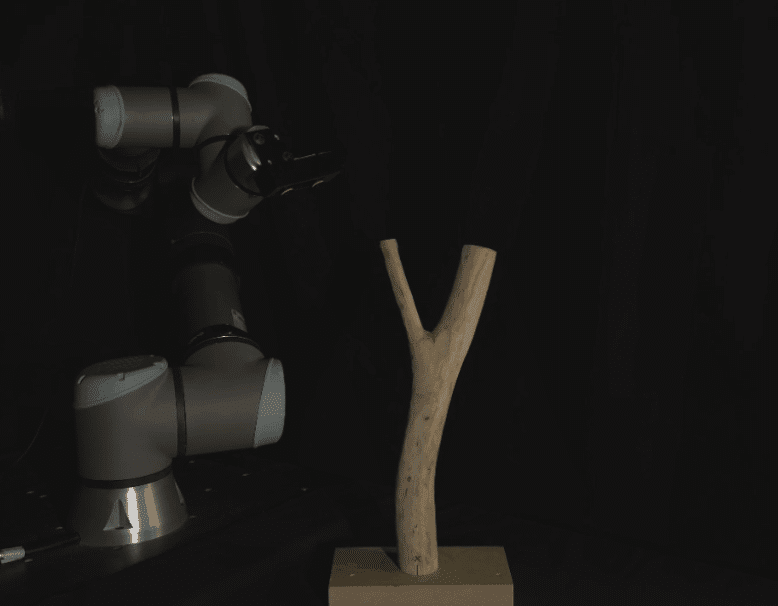
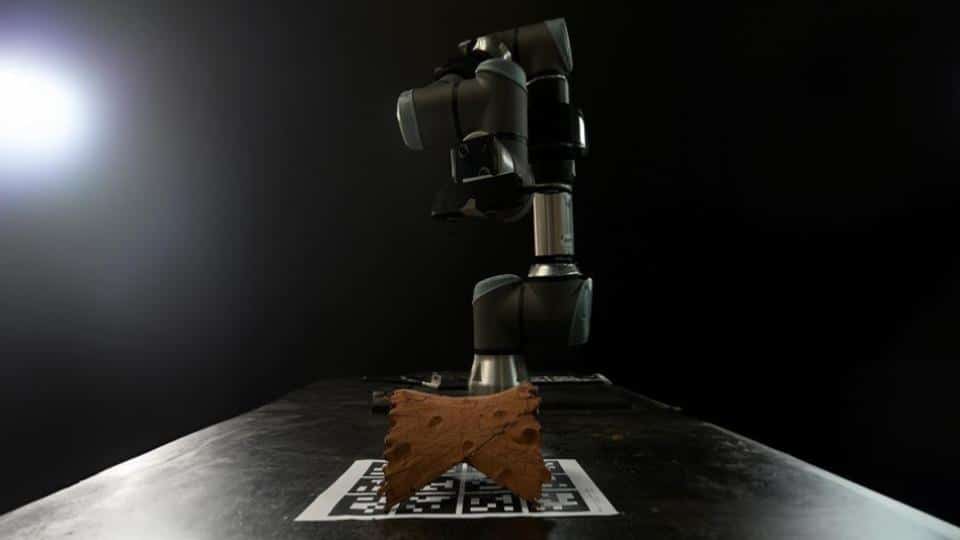
- Hands-on Application: Gain practical experience working with robotic manipulators and perception systems to apply ROS concepts in real-world scenarios.