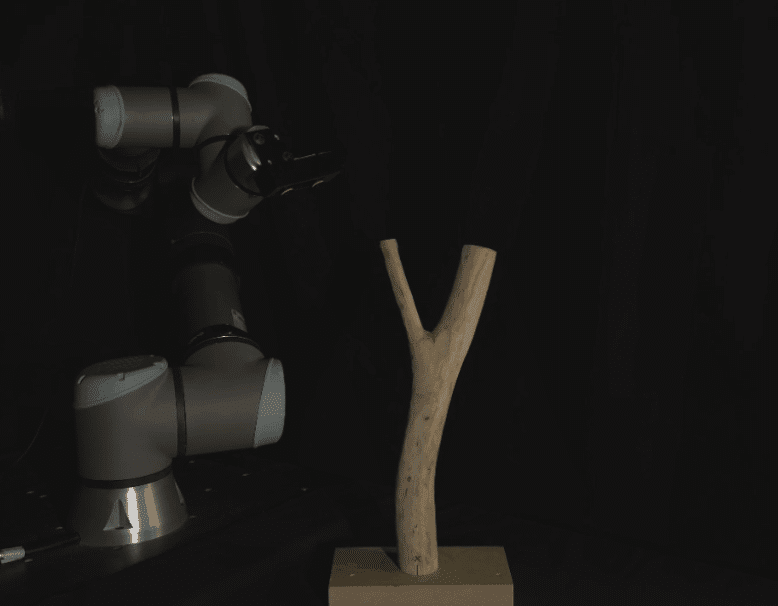
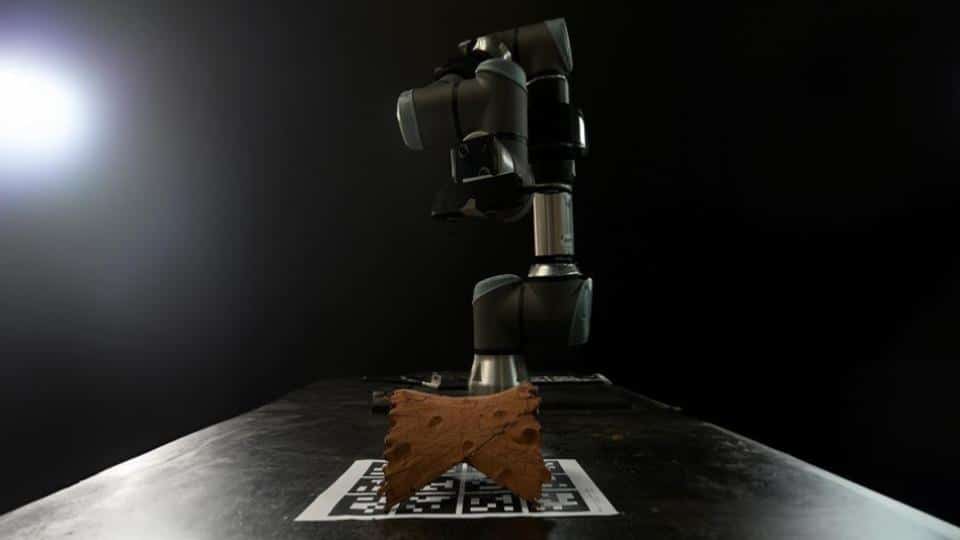
UR10e Reconstruction , Sticks and Stones
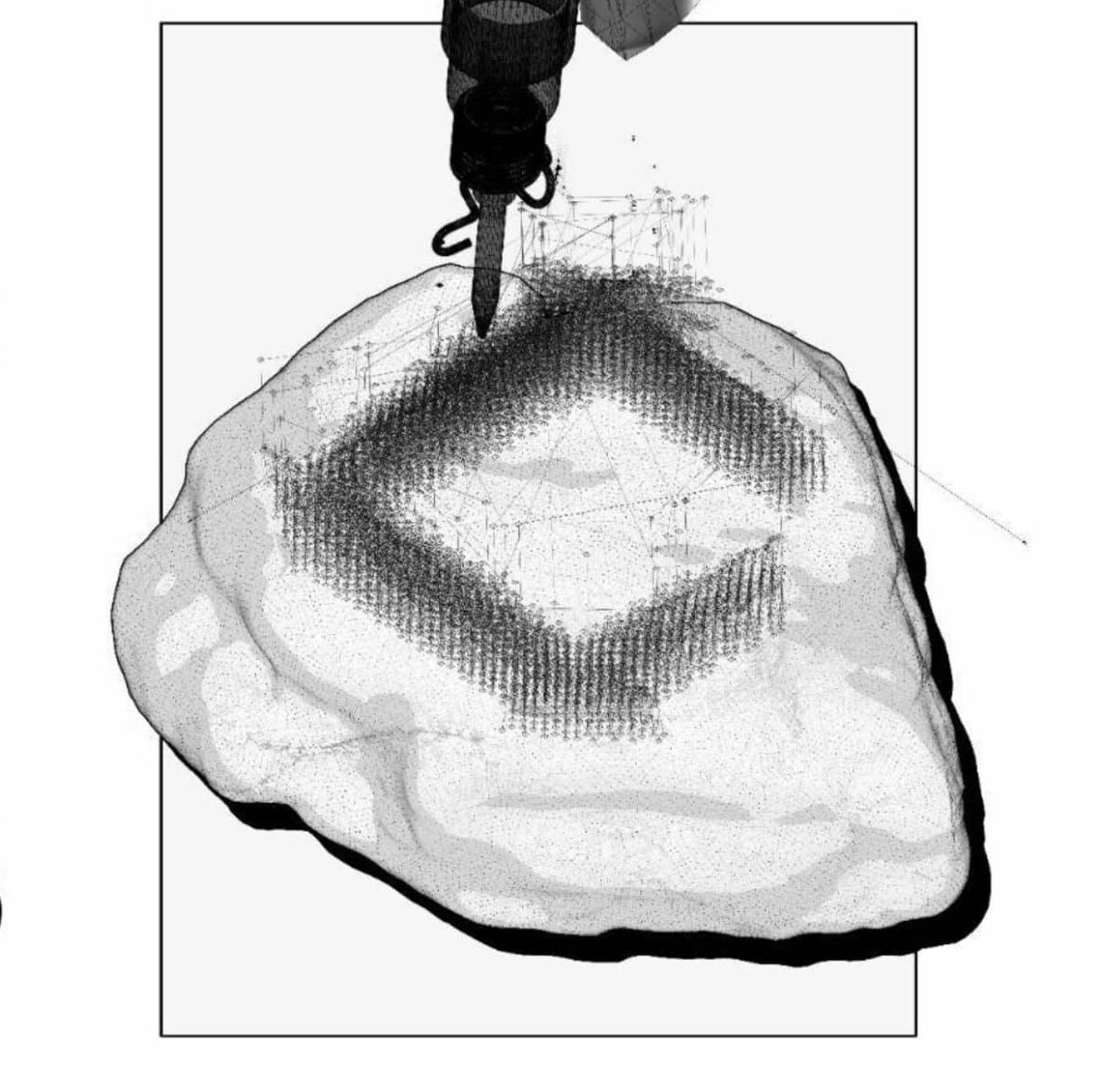
ROS-Based UR Scan ApproachUR10e Reconstruction: Integrating Robotics, 3D Scanning, and Precision Fabrication This post presents the UR10e Industrial Reconstruction Controller, developed for the MRAC24/25 program at IAAC. Our team—Santosh Prabhu, Nacho Monereo, and Neil Trouw—has built a system architecture that synchronizes a UR10e robot, depth sensors, and a Dockerized ROS environment to capture and reconstruct … Read more