The seminar aims to provide students with a clear understanding of the various sensors used in robotics and the techniques used to process the collected data. One of the fundamental aspects of robotic design involves understanding the external environment, and the robot’s own internal state. Based on this information, the robot is then expected to take decisions (automation) and carry out the necessary tasks (actuation). Thus, understanding how various sensors work, and more importantly, selecting the appropriate sensors based on the parameters being measured, is going to be crucial when designing an efficient robotic system.
A range of topics will be covered as part of this seminar, starting with an overview of the basics, the use of appropriate sensors to gather relevant data about the environment, various processing techniques for different types of sensors, and the analysis of collected sensor data.
Given its versatility in terms of application, computer vision has become an extremely vital discipline within the topic of sensing. The seminar will also focus on using a camera (RGB and RGBD) and its applications in robotics, including object recognition and tracking, as well as the analysis of collected sensor data, using image processing techniques as well as machine learning, for the purpose of decision making and control.
Learning Objectives
On successful completion of this seminar, the student will be able to:
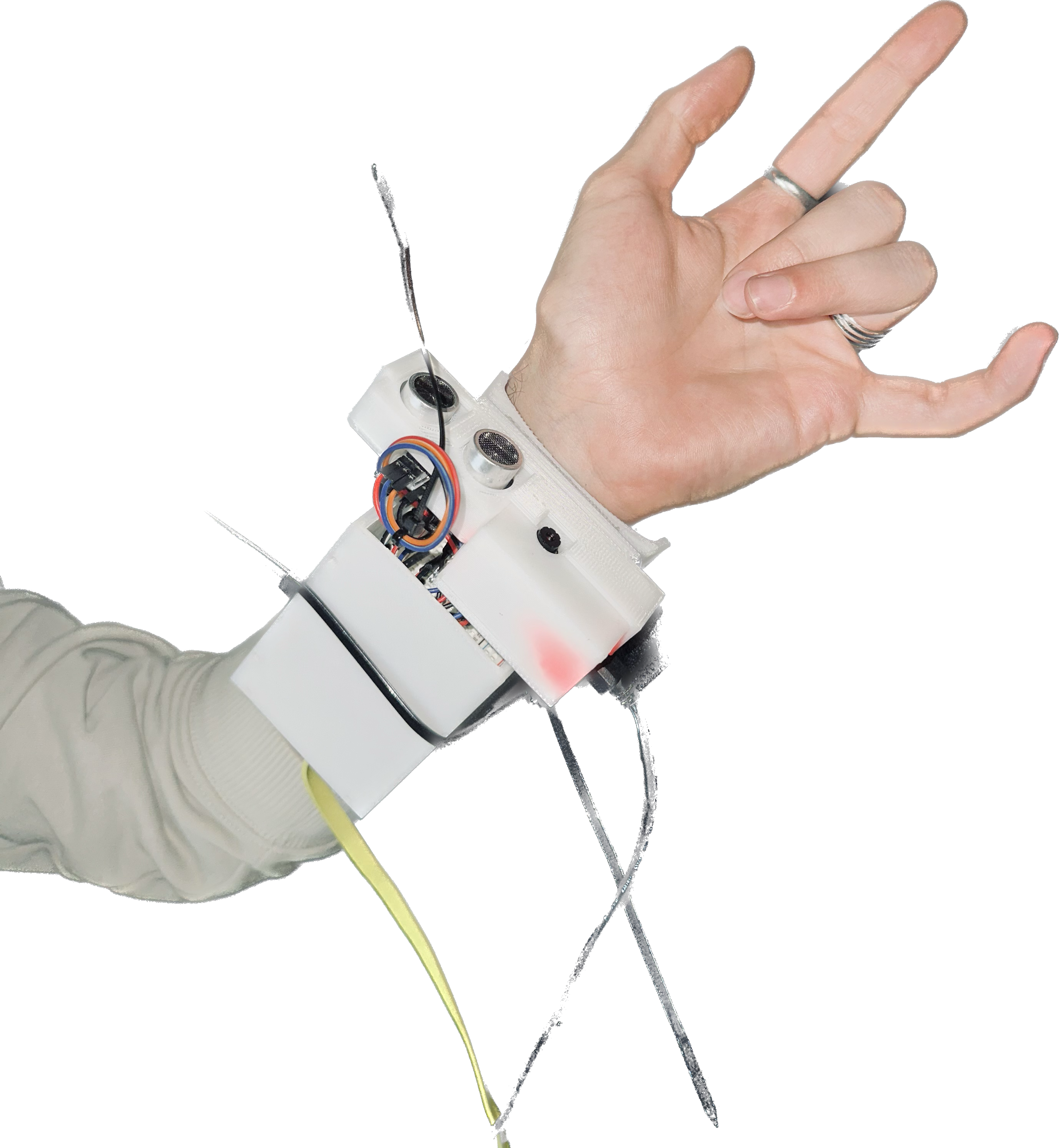
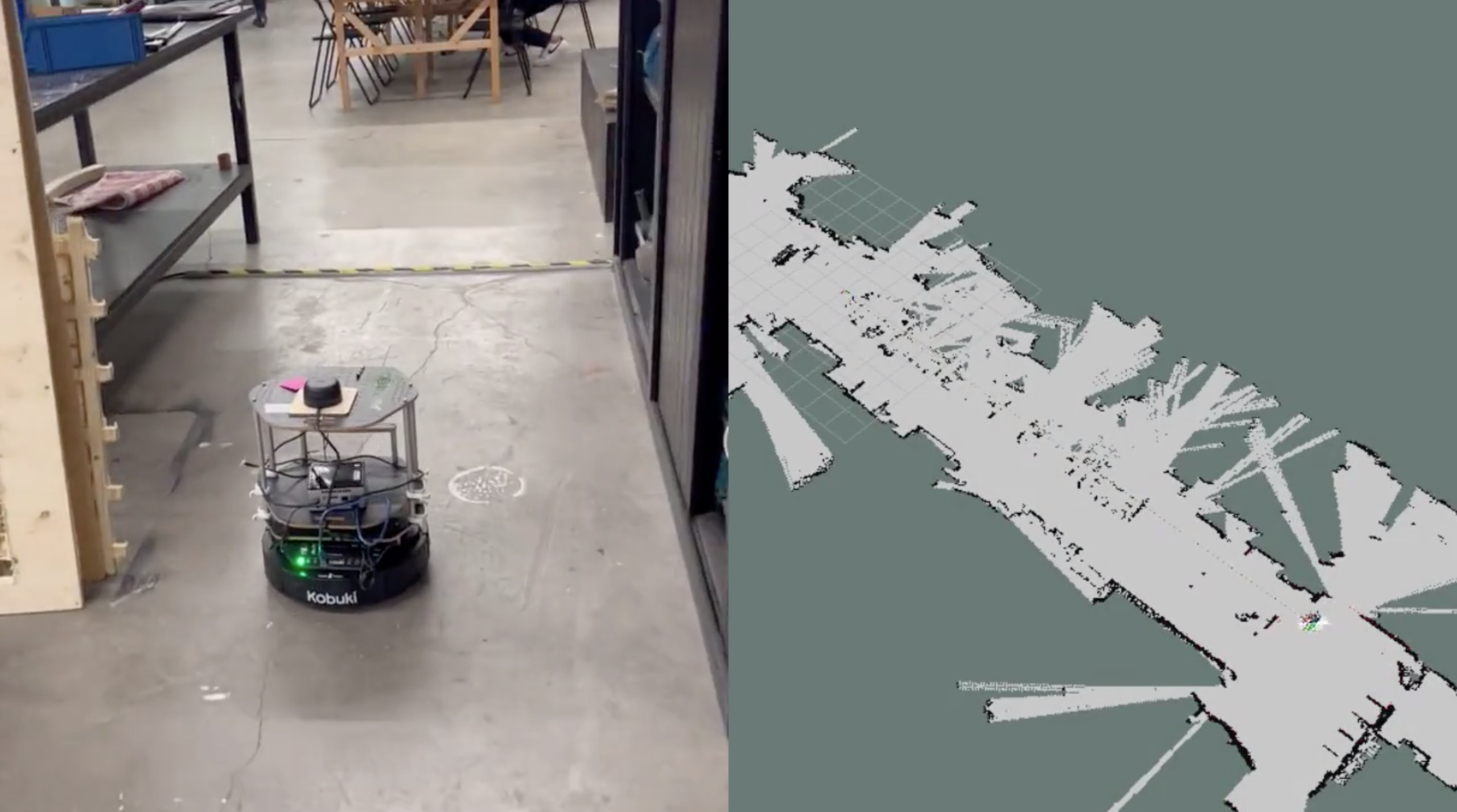
- Understand the principles and functionalities of different types of sensors used in robotics, including how they are used to gather data about the environment.
- Collect data from various sensors and apply processing techniques to gain a better understanding of the parameter being measured.
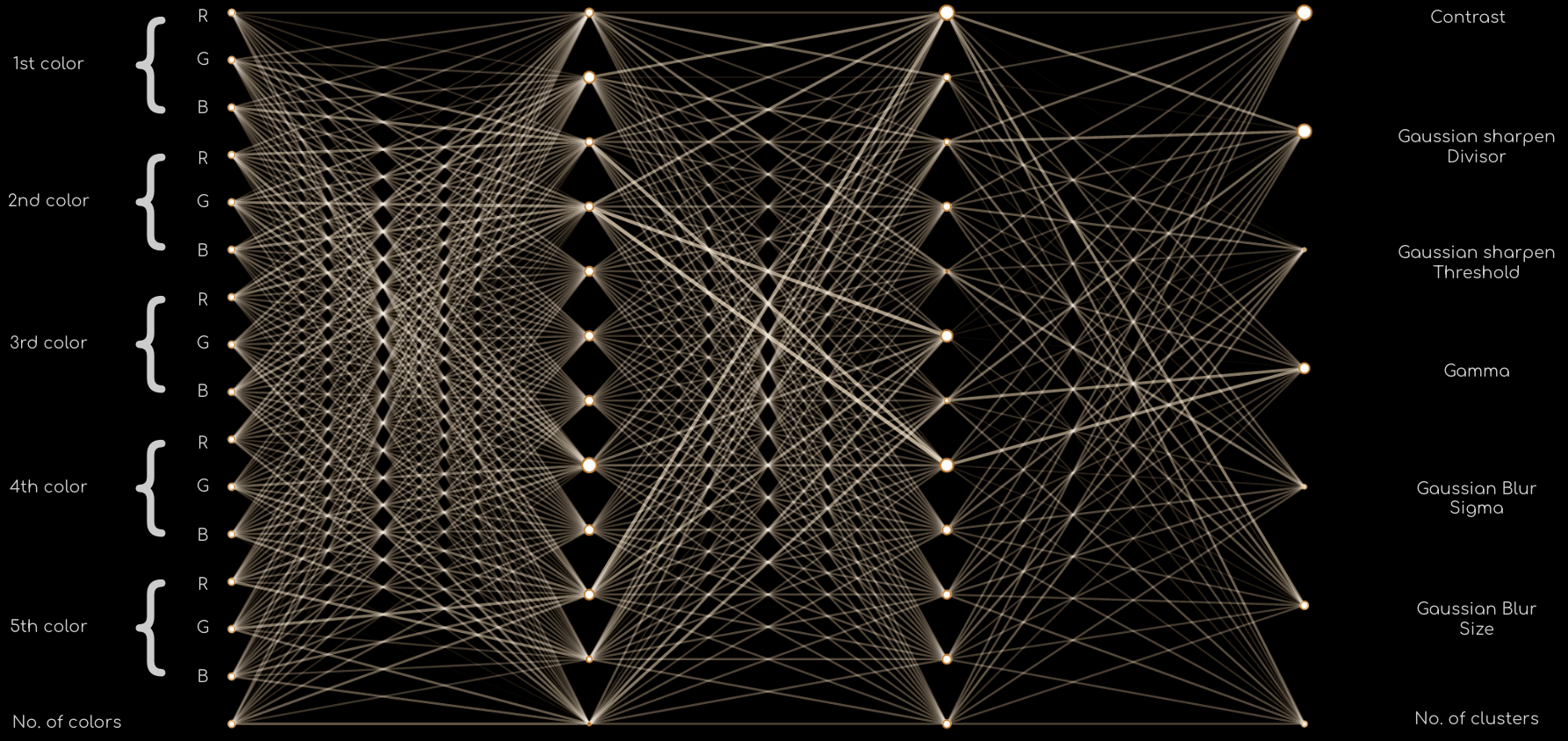
- Develop an understanding of various image processing and machine learning methods to perform object detection, recognition and tracking using computer vision.
- Apply concepts and techniques learned to real-world robotics problems.