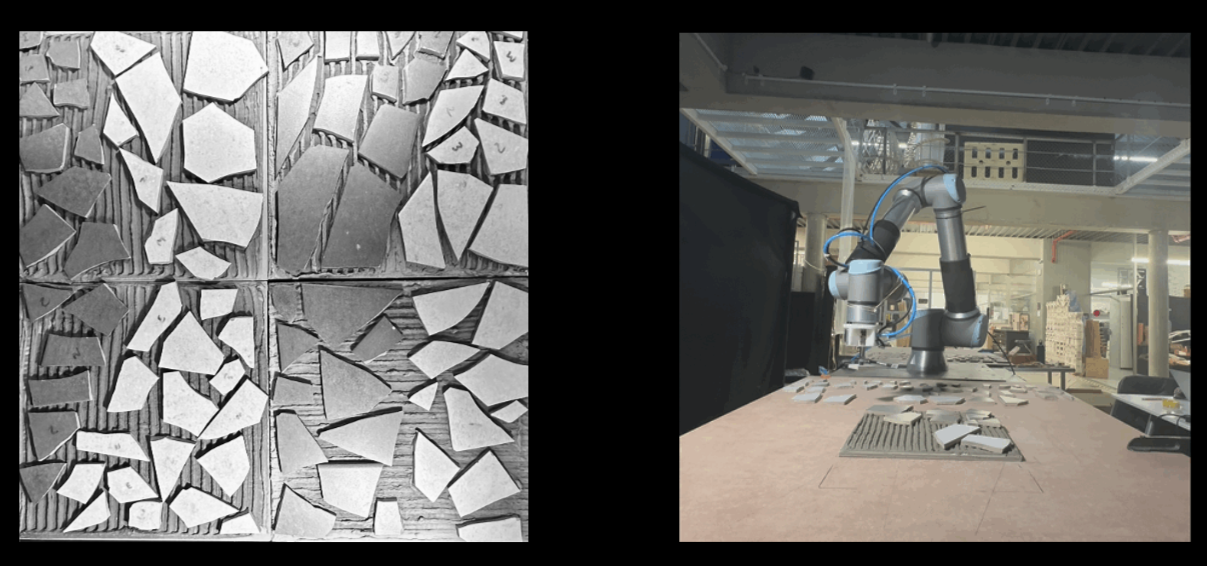
In a world of excessive consumption, new solutions are needed to recycle and revalorize our waste. In particular, the construction industry responsible for up to 30% of all waste is currently looking at alternative models based on circular economy. Yet ancestral craftsman techniques have been recycling construction material, in particular stone and ceramic material into mosaic art.
Mosaic tessellation has a long history, starting in Mesopotamia in the 3rd millennium BC. Ancient crafts techniques combined with actual industrial processes are an amazing way to explore novel approaches and innovative outputs. Gaining a deeper understanding of those techniques and designs they generate can provoke an innovative line of thinking and designing. It becomes particularly interesting when ancient processes are linked to technology within a creative robotic framework.
Industrial robotic arms are very precise devices, used to carry out complex tasks in known and controlled environments. What if an industrial robotic arm had to perform different tasks in unknown environments?
In recent years, vision devices have evolved from being a device for taking pictures and saving memories to being the sense of sight for machines. Now, machines can see, orient themselves, make decisions and carry out tasks for which they were not explicitly programmed.
In this way, robots acquire a layer of intelligence that they did not have when they were used as reproducers of pre-programmed tasks, giving the robots a certain autonomy that allows them to act in new situations, new environments without supervision or having to be reprogrammed.
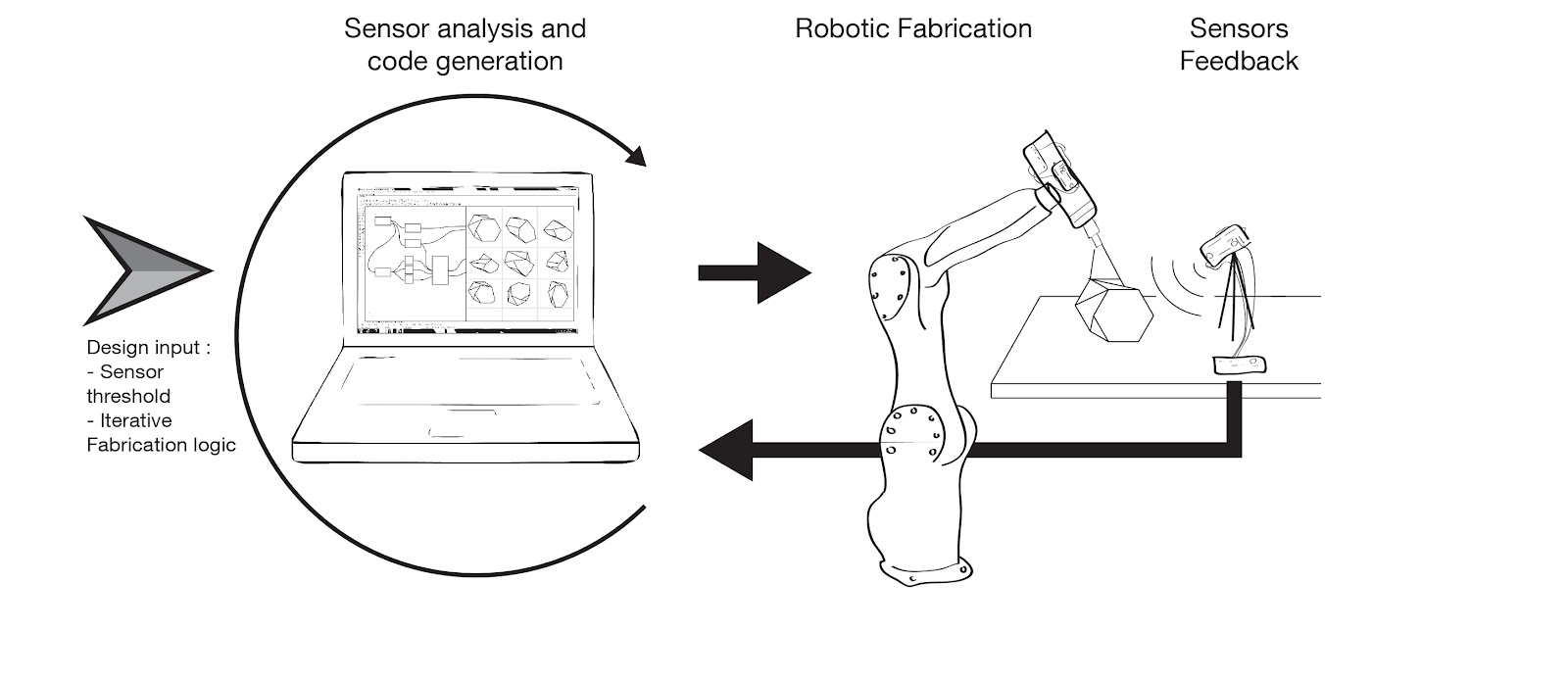
In this workshop we will see different vision sensors in 2D and 3D formats. How to use them, extract the information they provide us and analyse the provided information to be able to use it in different applications.
At the same time, we will see how to control the robotic arm in a real-time closed loop.
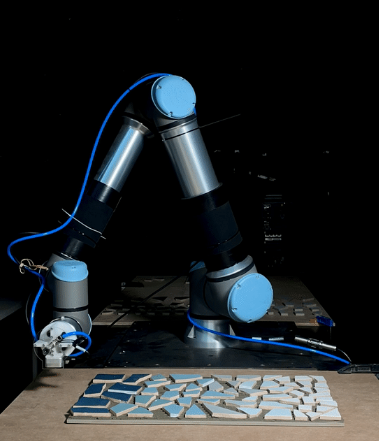
The application generated at the end of the workshop will be the assembly of a mosaic using recycled leftover pieces where the closed loop system will guide the robotic arm to choose the right piece in each step of the process.
Learning Objectives
At course completion the student will:
- Apply computer vision knowledge into a specific application of fabrication
- Know how create a closed feedback loop system for robot arm processes
- Learn and define Mass customised design based on material input.
- Apply Robotic Technology to Circular Economy context.
- Explore mosaic tessellation technique