AIM \\
Create a design logic that would enable artists and mosaic makers to create unique, one of a kind and highly complex mosaic patterns by giving a second life to broken tiles; having full control of the overall geometry pattern and manufacture of each individual tile through computational technologies and mass production robotic strategies.
COMPUTATIONAL WORKFLOW \\
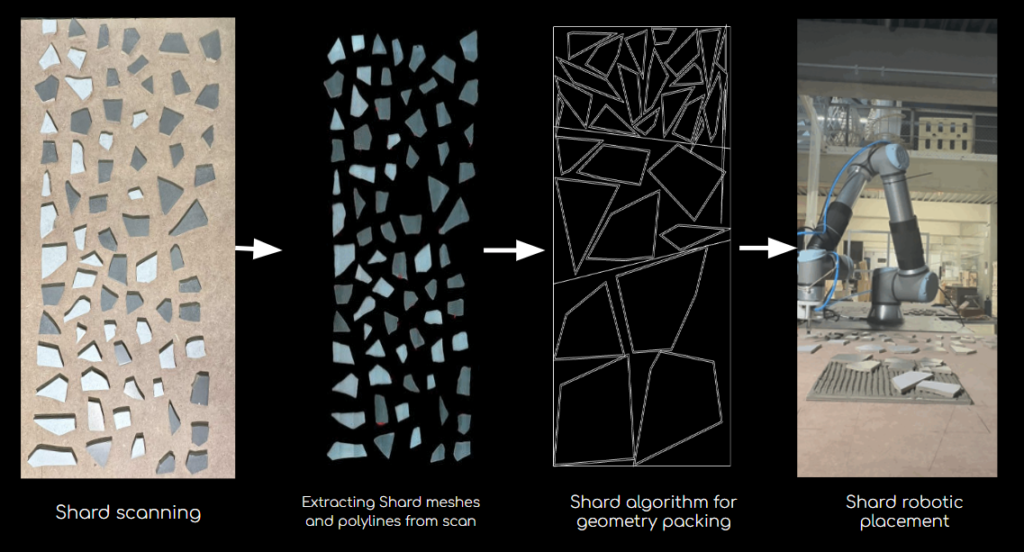
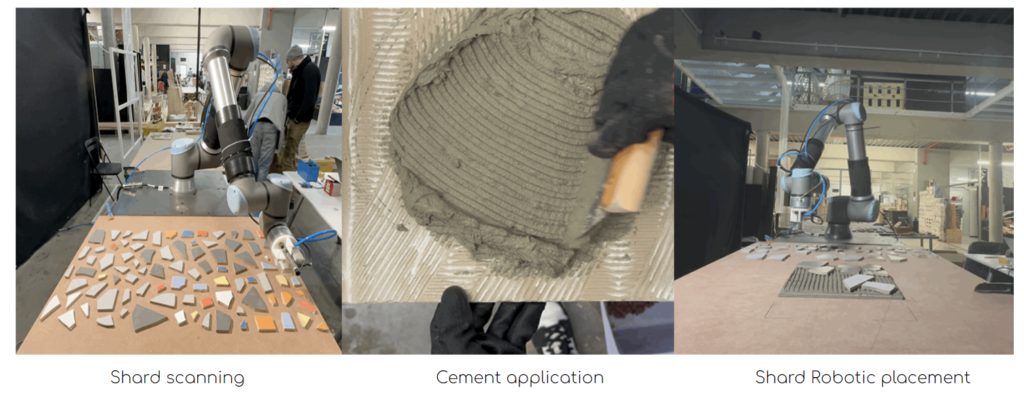
The Workflow starts with computer vision, by scanning the shards with the UR and a RealSense camera, creating a digital library for further geometrical exploration. Once we obtain the data from the robot, we extract the meshes, RGB colors and polylines to import the geometries to grasshopper. Then we apply the packing algorithm to the shards for the robotic placement.
DESIGN LOGIC \\
To create the packing algorithm, we created a design logic that would determine the overall design by setting some simple rules.
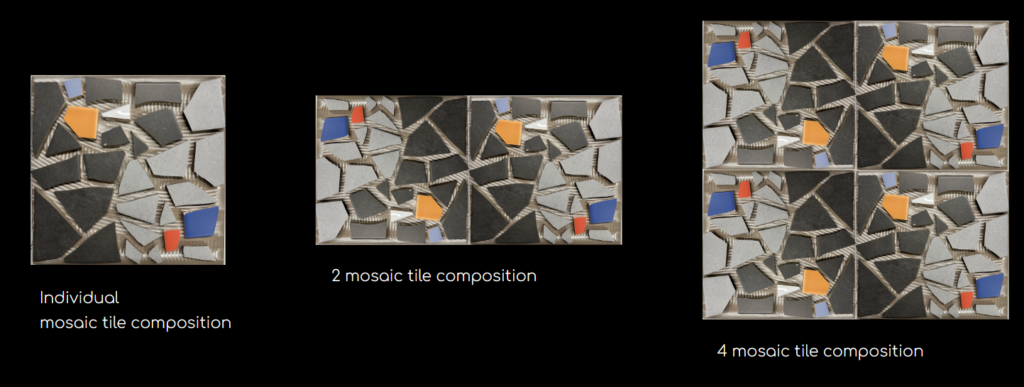
As a mass production strategy, we decided to work with 30x30cm tiles that would follow two different types of strategies:
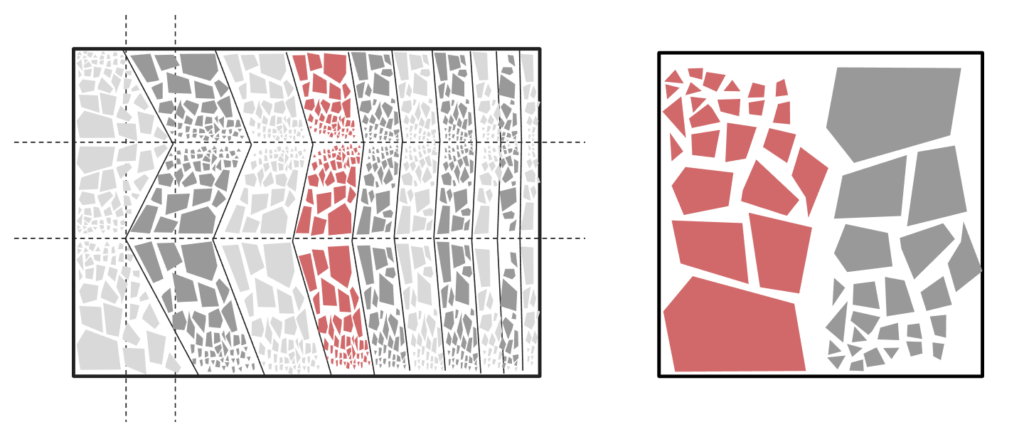
- Color accent: the artist would determine the location of certain shards that would vary from color and size as an accent of color. In this scenario, the packing algorithm would grow around the piece positioned in an opposite color creating a gradient of sizes.
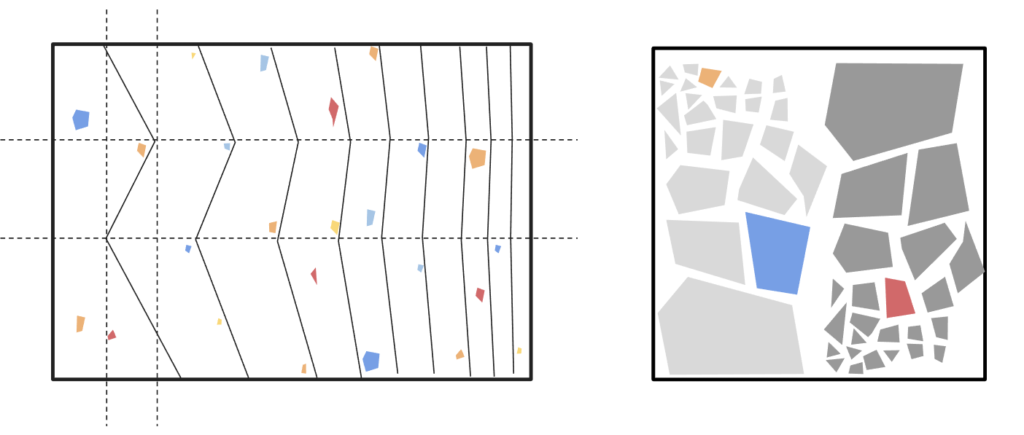
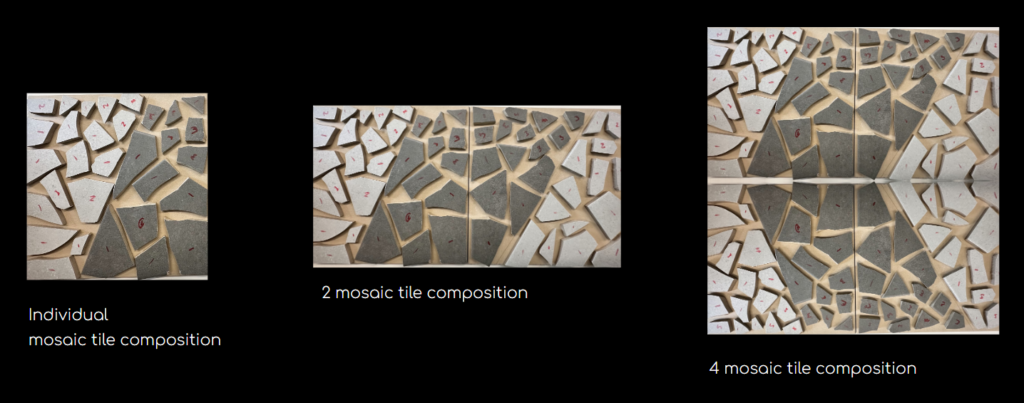
- Size Gradient: This strategy looks forward into a more mass produced design, where the packing algorithm divides into two the 30x30cm tile by a diagonal line that vary from its end points position. The biggest shards would be located in the larger size of the divided tile, creating a gradient growth to a smaller size through the design.
MANUAL EXPLORATIONS \\
To understand this logic we created some manual explorations to have further knowledge of the manual workflow that mosaic artists have.
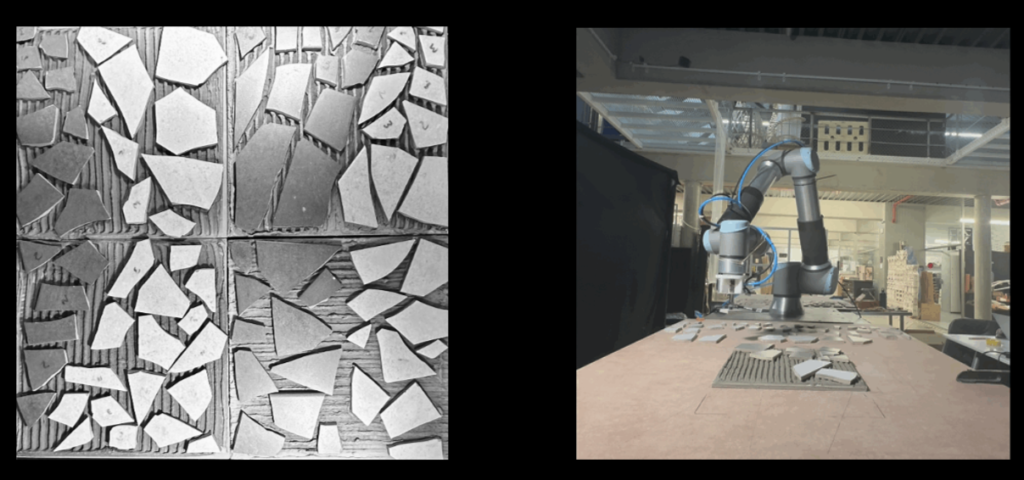
FABRICATION WORKFLOW \\
PROOF OF CONCEPT \\ FINAL RESULTS