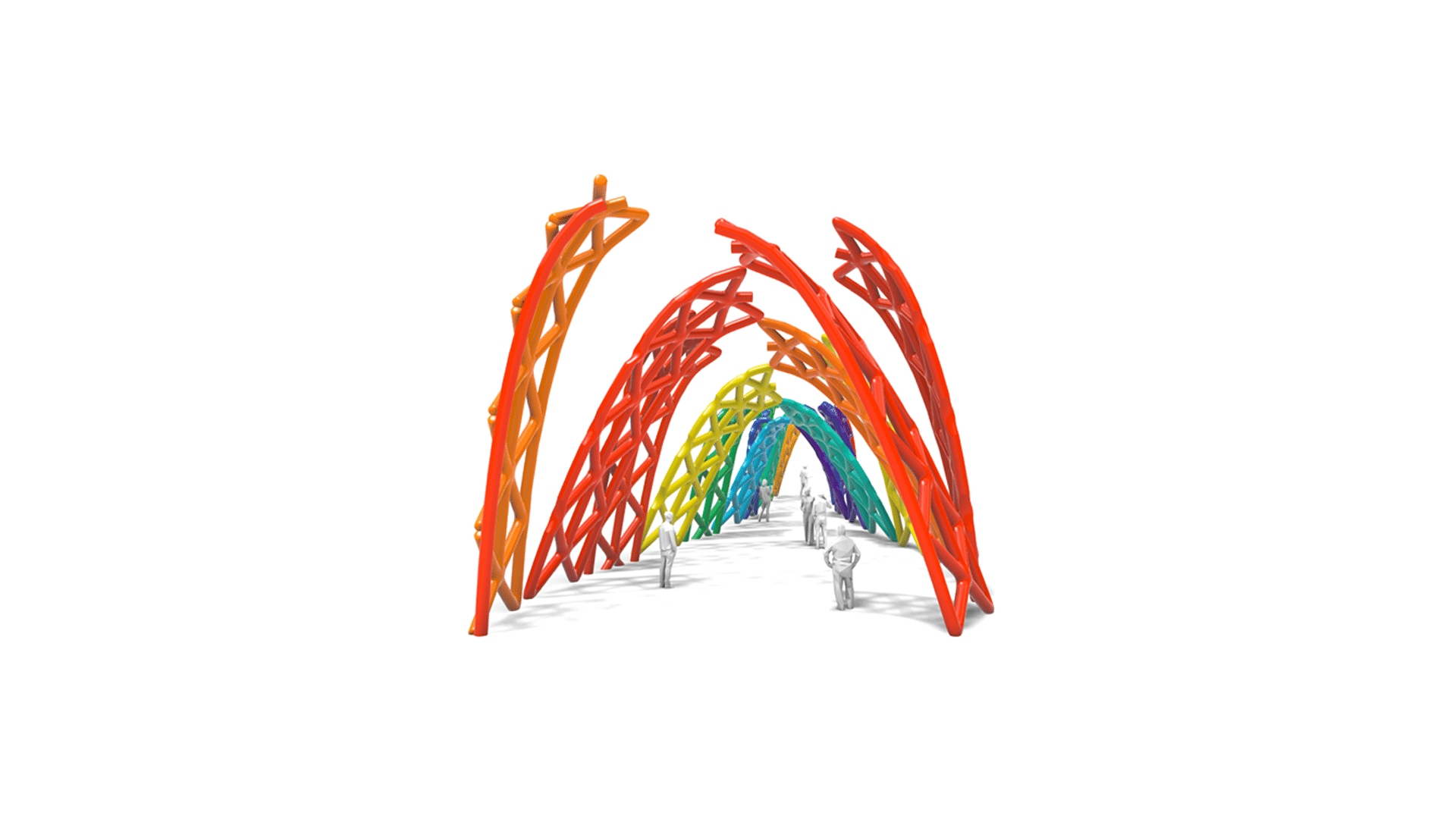
Veil Of Timber

Veil of Timber explores the transformation of a parametric pavilion into a detailed, data-driven BIM system. By integrating computational design and metadata with the help of grasshopper and real-time visualisation using Speckle and Power BI. The project bridges geometry and data to enable querying, analysis, and informed decision-making. Overview The pavilion is a parametric system … Read more