Robotics for Ecological Buildings: STRAW

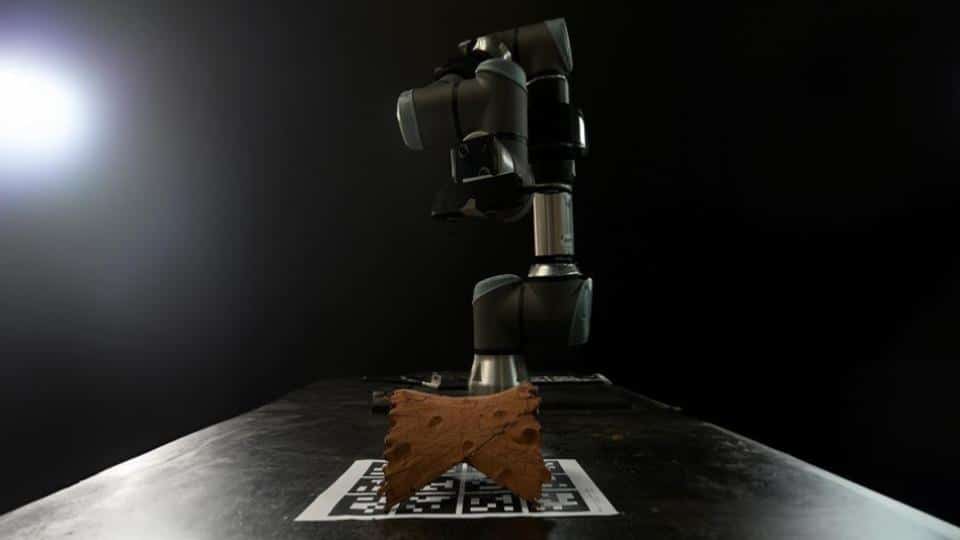
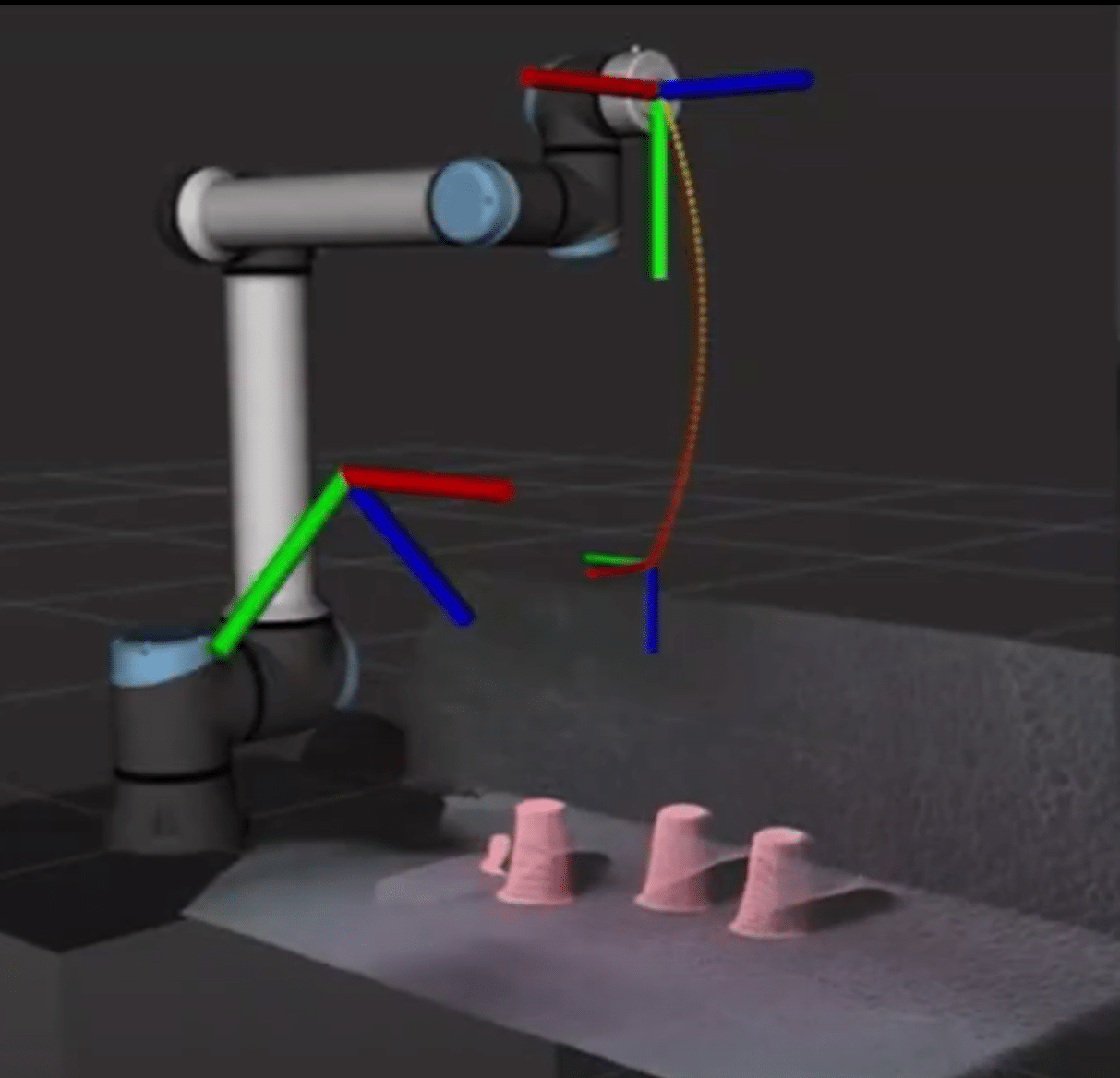
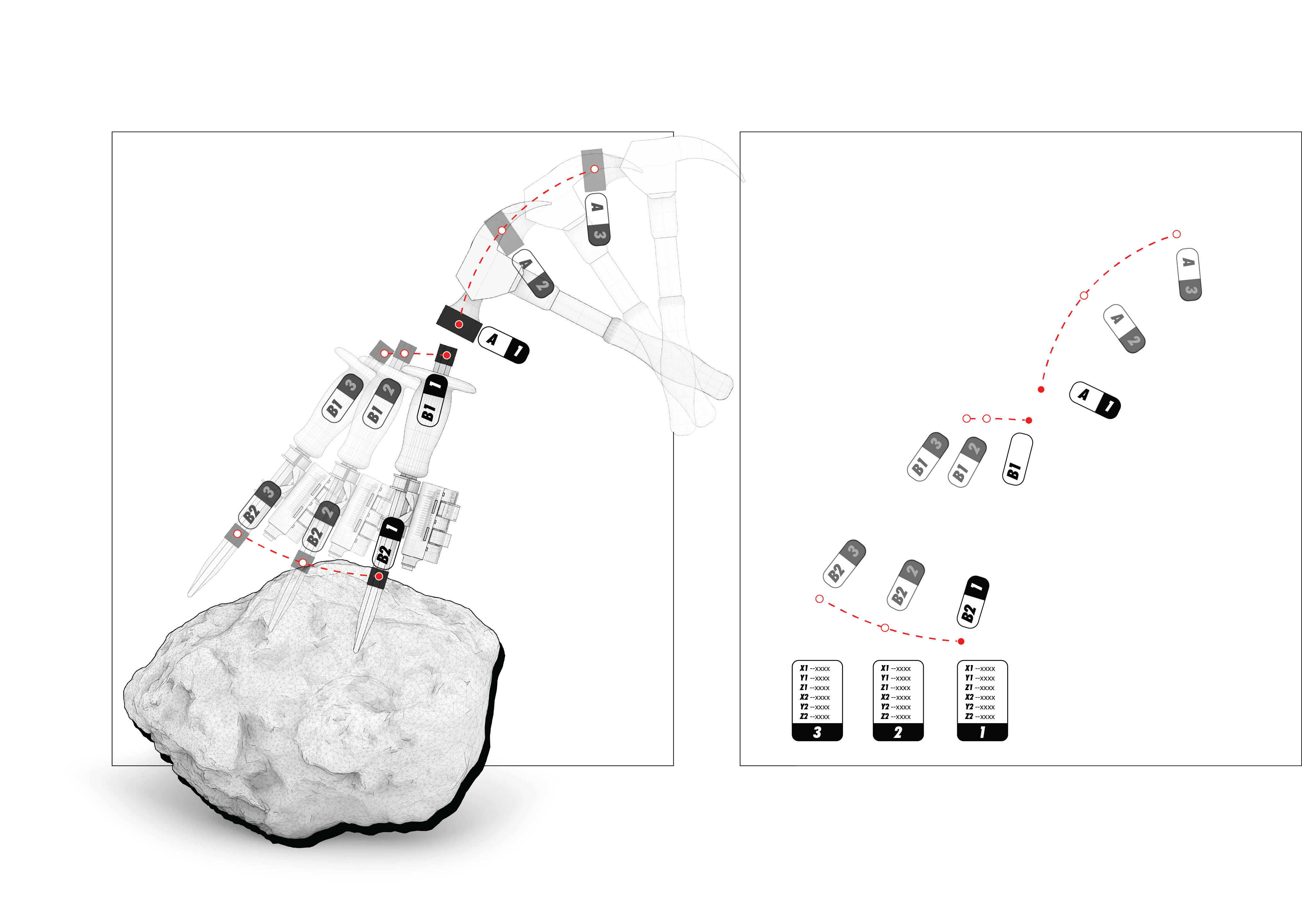
This work investigates the structural potential of straw in its raw, unprocessed state — exploiting its natural wilderness and fibrous friction to build systems from its inherent properties. By coupling these material behaviors with robotic fabrication, the process becomes parameterized, enabling a vernacular material to be deployed within a precise and predictable architectural system. Introduction … Read more