SYNFORM I

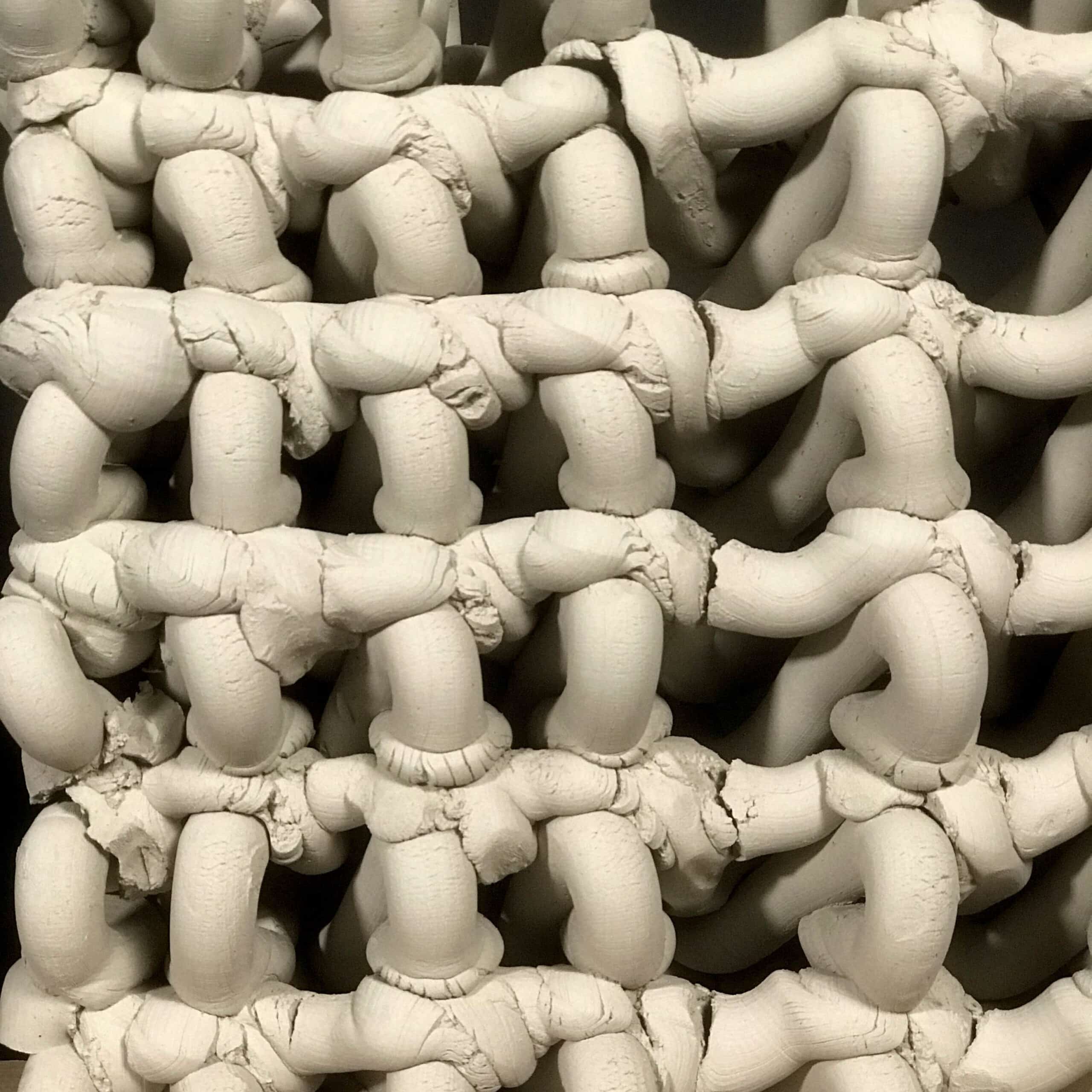
Non Planar Strategies for Robotic Polymer 3D Printing: Translating Digital Realms into Large-Scale Architectural Elements to Reimagine Ornament and Material Expression.

Targeted toward students’ future careers in Academia, Start-up, or Industry, the second year of the Master in Robotics and Advanced Construction offers the opportunity to develop a thesis project with the support of IAAC infrastructure, experts and network.
The development of the project will be supported by advanced seminars in Technology, Theory, and Business to bring the proposal state of the art research that can really impact the construction industry.
In parallel to the development of the Thesis Project Studio, the second year of the Master in Robotics and Advanced Construction offers a series of seminars enhancing the theoretical, practical, and digital skills of the students. Students will also have the occasion to join cross-disciplinary workshops to build large prototypes and installations.
Non Planar Strategies for Robotic Polymer 3D Printing: Translating Digital Realms into Large-Scale Architectural Elements to Reimagine Ornament and Material Expression.
SYNFORM is a design-to-fabrication studio that fabricates luxury scenography and architectural surfaces that are parametric, modular and reconfigurable through large-scale 3D printing using recyclable plastics. Market Context According to Precedence Research, the global 3D printing market is estimated at around USD 29.29 billion in 2025 and is projected to grow to USD 134.58 billion by … Read more
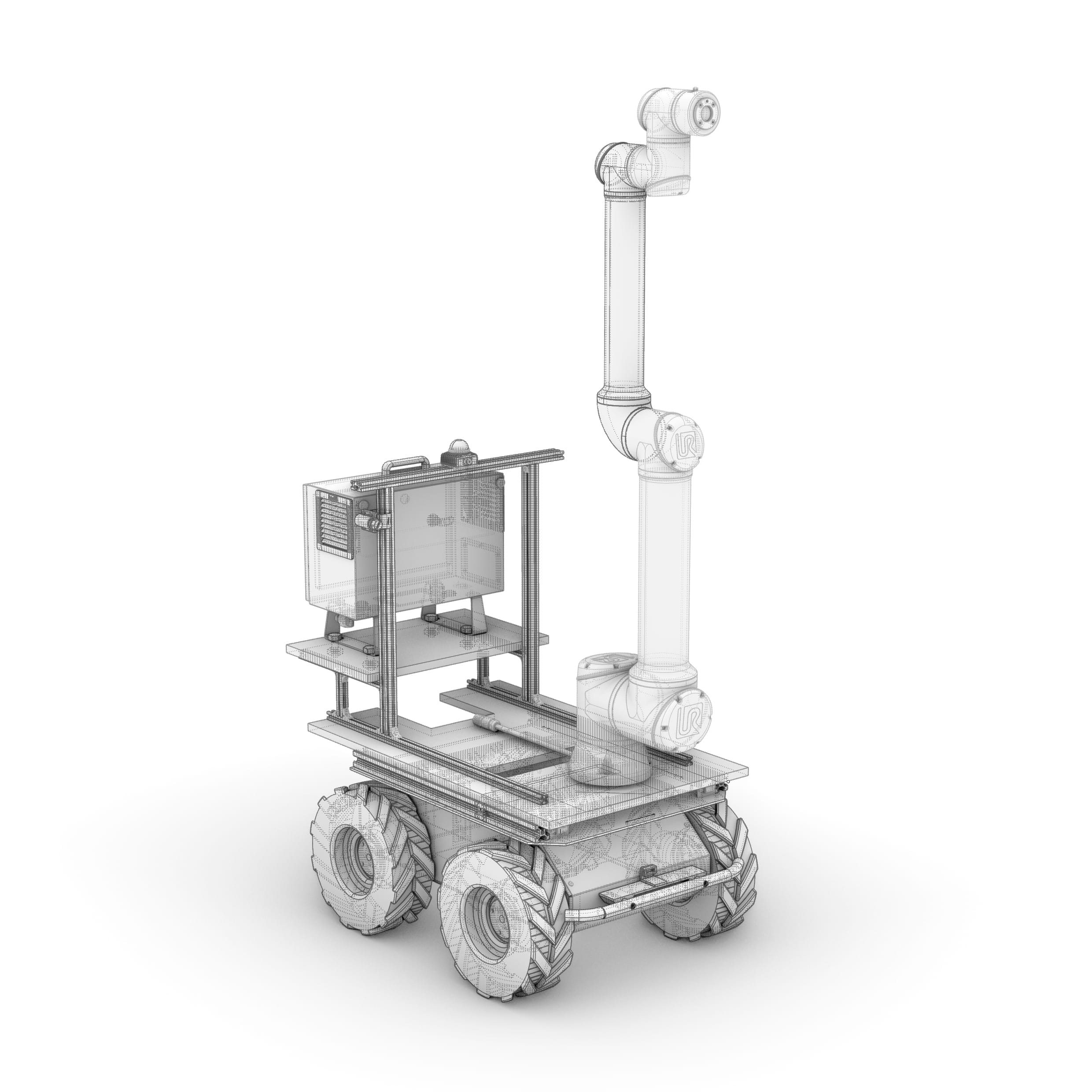
ABSTRACT Autonomous parametric furniture assembly using modular blocks and ROS-driven industrial robots promises to revolutionize on-demand manufacturing. In this work, we introduce DRDA (Dynamic Robotic Design Activities), a unified framework that seamlessly links customer-driven design to autonomous multi-robot execution. A user-defined geometry and style, which our custom block-selection and toolpath-generation engine converts into collision-free pick-and-place … Read more

whilst global temperatures are rising towards +4°c, building facades are a main contributors to the urban heat island effect within cities.2050 about 70 % of the world’s population will live in cities.The building sector globally consumes a significant amount of energy for heating and cooling. In fact, about half of the global cooling load is … Read more
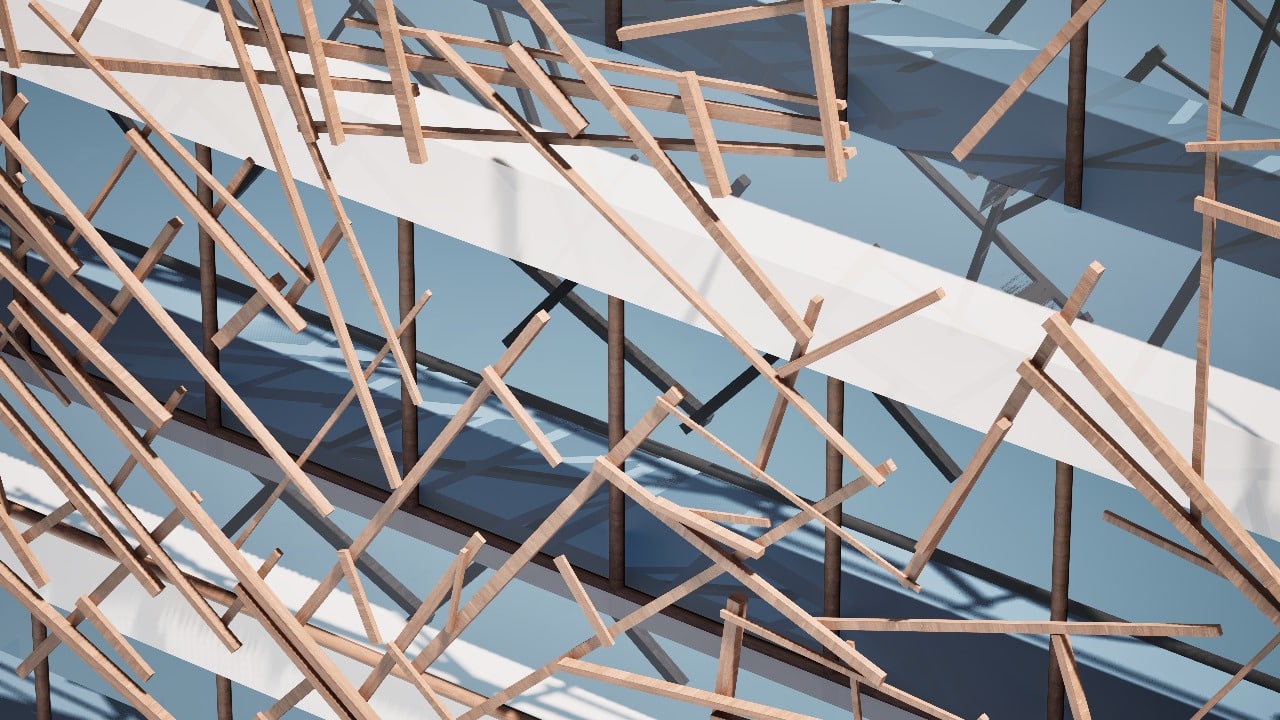
In the pursuit of a sustainable built environment, Timber Syntax demonstrates how reclaimed, non-homogeneous timber can be transformed into high-quality facade systems through a computational and robotic pipeline. Developed at the Institute for Advanced Architecture of Catalonia (IAAC), this project bridges waste reuse, advanced fabrication, and circular design to propose a new paradigm for timber … Read more
Aerial Reforestation Using Autonomous Drones Context Desertification is a major environmental challenge in Spain, driven by both natural and human factors. Over 74% of the country’s land is at risk, especially in regions like Andalusia, Murcia, Valencia, and Castilla-La Mancha. This is largely intensified by factors such as deforestation and wildfires, which leave the soil … Read more
“Spatial Cognition in Robotics: Optimizing Construction Workflow with AI”Shu Xiao – MRAC02 Thesis, IAAC 2024–2025 Despite advances in manufacturing automation, the construction industry continues to rely heavily on manual labor due to its unpredictable environment, safety concerns, and fragmented workflows. This project explores how vision-guided robotics and real-time AI agents can close that gap by … Read more

1. Research Statement AIM OF RESEARCH: To create a biocomposite material primarily out of Cacau Seed Shell and utilizing PLA as its matrix and use it for robotic additive manufacturing process to produce interior design pieces, following evaluation parameters from circular economy 2. How to add the maximum amount of CSS to PLA Matrix 3. … Read more
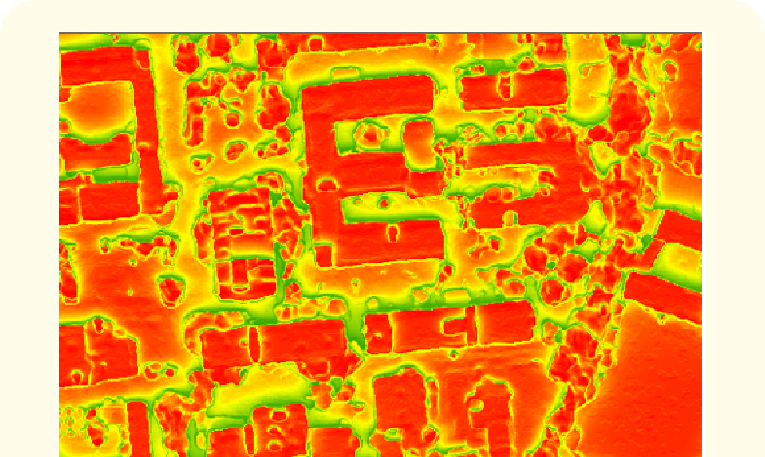
EU generate 25-30% of all waste from construction and demolition (C&D) activities, much of which remains underutilized or sent to landfills. Context whilst global temperatures are rising towards +4°c, building facades are a main contributors to the urban heat island effect within cities.2050 about 70 % of the world’s population will live in cities.The building … Read more
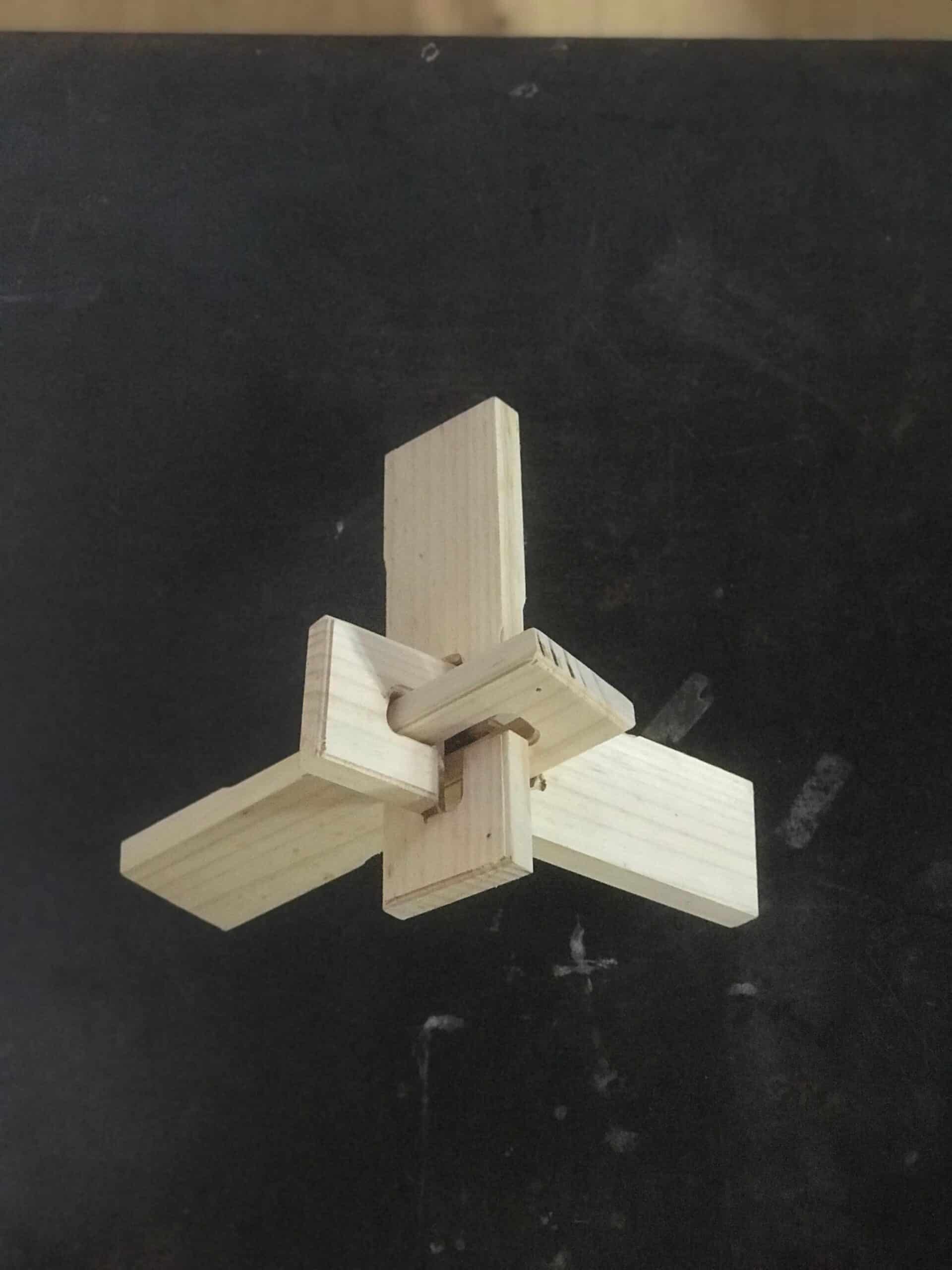
Robotic Fabrication of Friction-Based Timber Joinery: Burr Puzzle Assembly This research explores robotic assembly of friction-based interlocking timber joints using the burr puzzle as a case study. The puzzle’s tight tolerances and sequential assembly pose challenges. Through modeling and robotic execution, the study shows that while a single-robot approach is feasible, dual robots are necessary … Read more
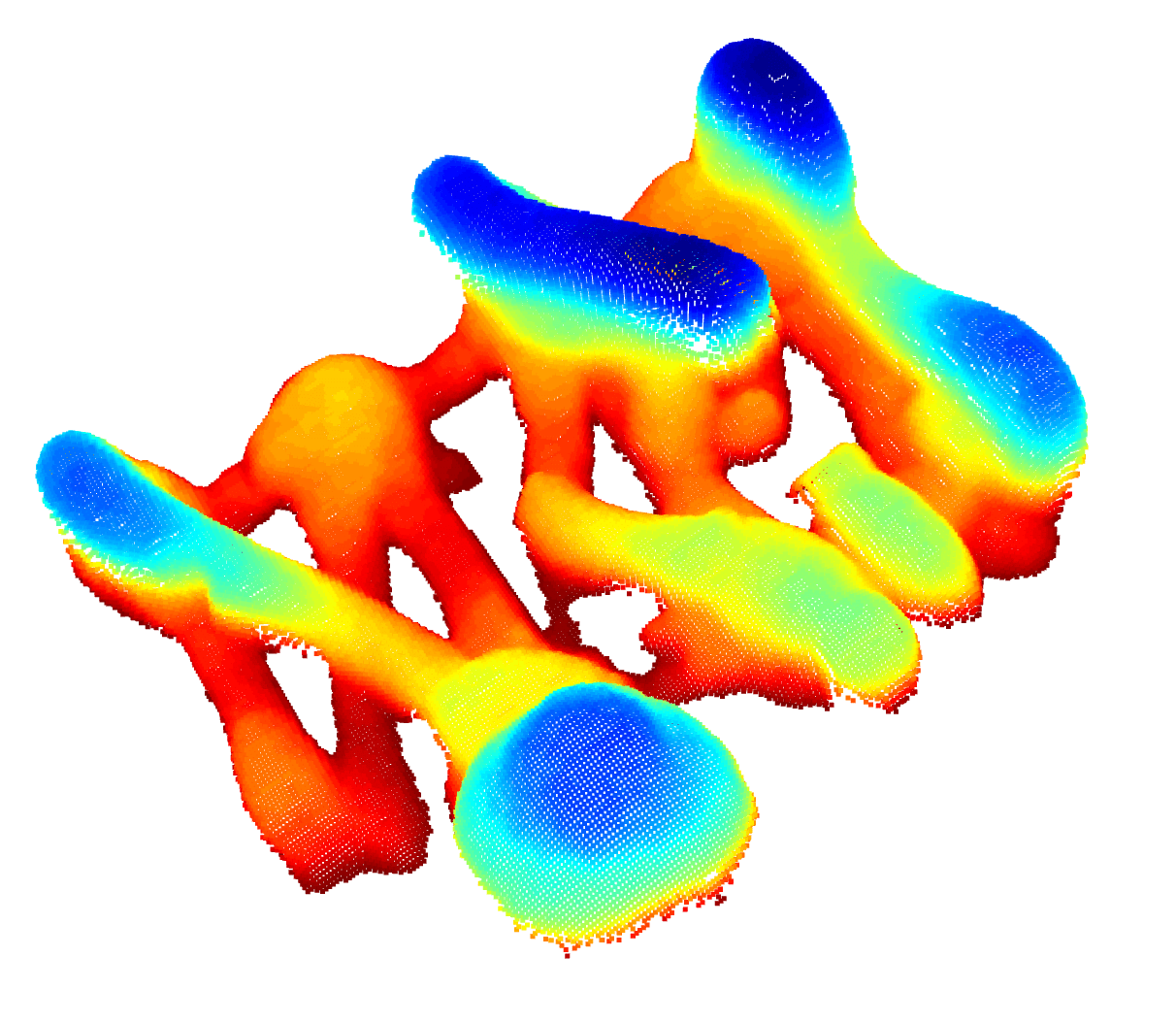
Workflow for Detection (Transformation to the Real World) Test for getting the points in real world Workflow for Detection (Getting points into the Trajectory) Test for getting the points in real world Workflow for Detection (Processing on Point Cloud) Test for getting the points in real world Machina Connection for ABB_6700 (Simulation)

For this term experiments and tests were conducted for the evaluation markers of the biocomposite of PLA with different charges of Cacau Seed Shell and the Fabrication performances of each biocomposite charges. Tests on mechanical perfomances such as Tensile Strenght, Flexural Stress and Izod Impact were conducted. Compostability tests were also setup in the range … Read more