WORKSHOP 2.2_Disassembly & Reassembly

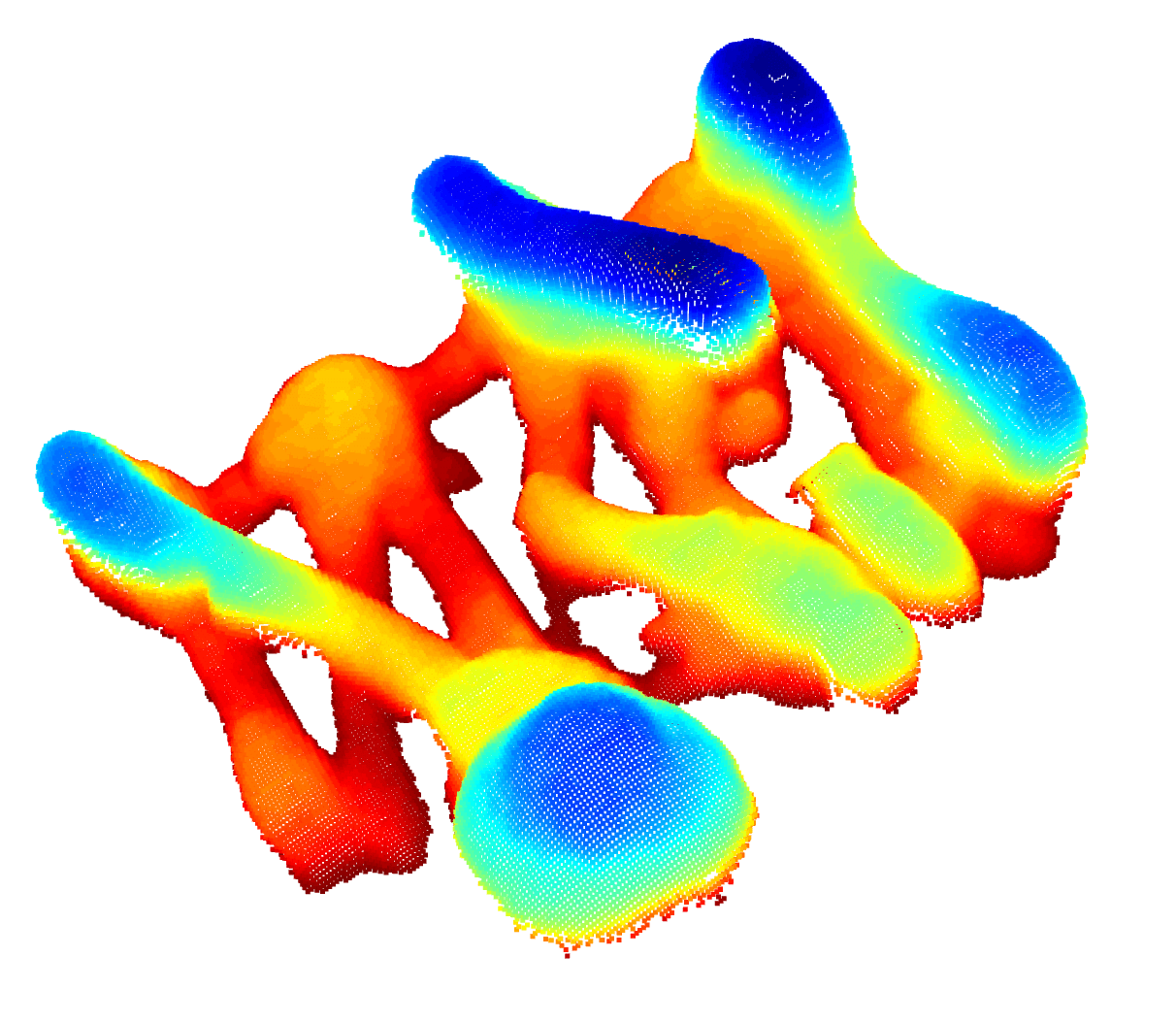
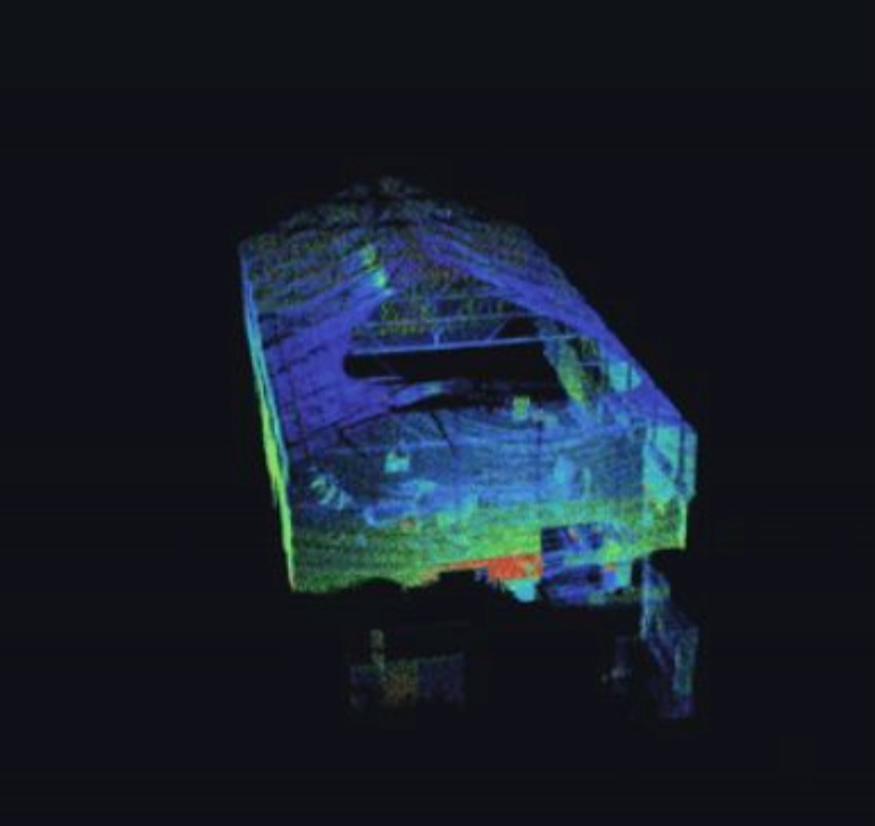
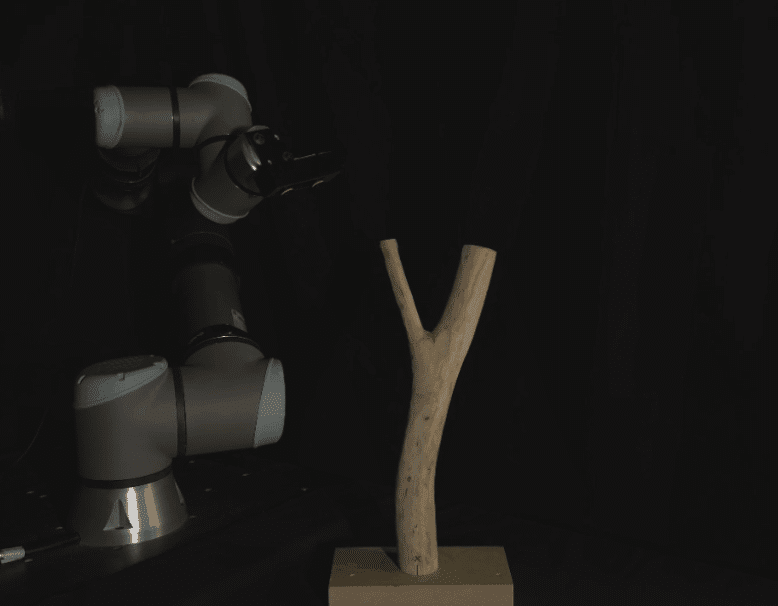
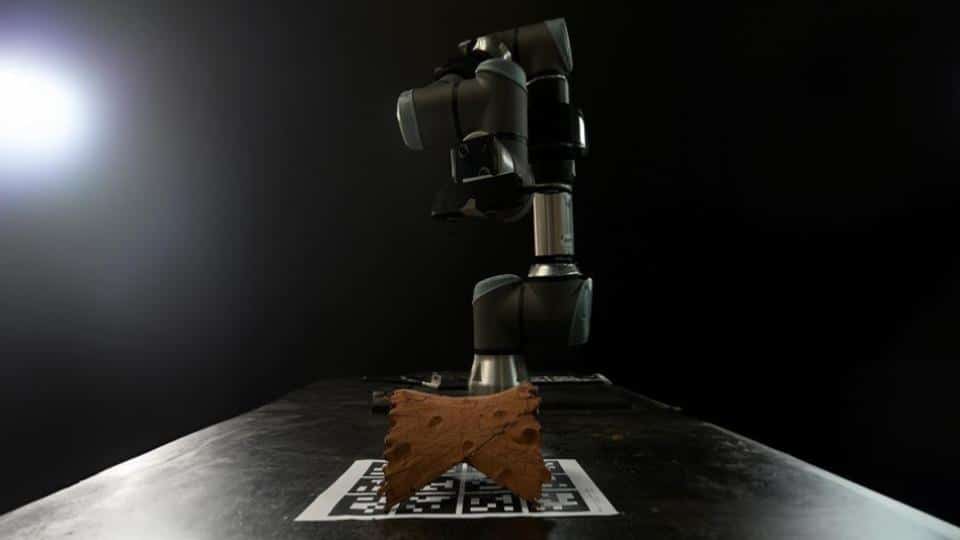
Robotic Disassembly& Reassembly with Spatial AI In this blog post, we’re presenting the project developed during IAAC 2026 Workshop 2.2 in collaboration with the Augmented Fabrication Lab. Our focus was to step beyond purely digital design and engage directly with physical processes, using robotic systems and sensor-based feedback. Through hands-on experimentation with robotic fabrication and … Read more