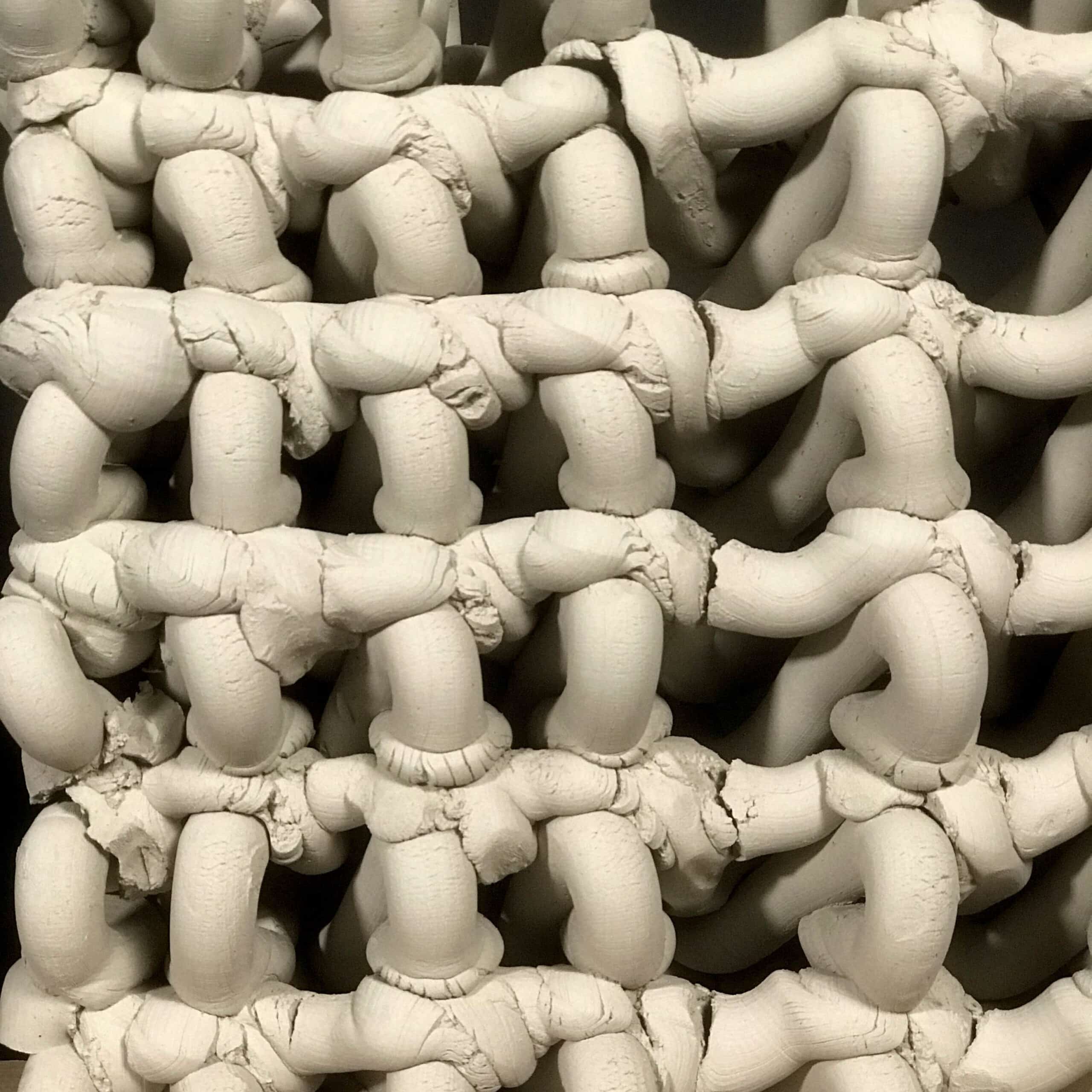
CLAY CREATE
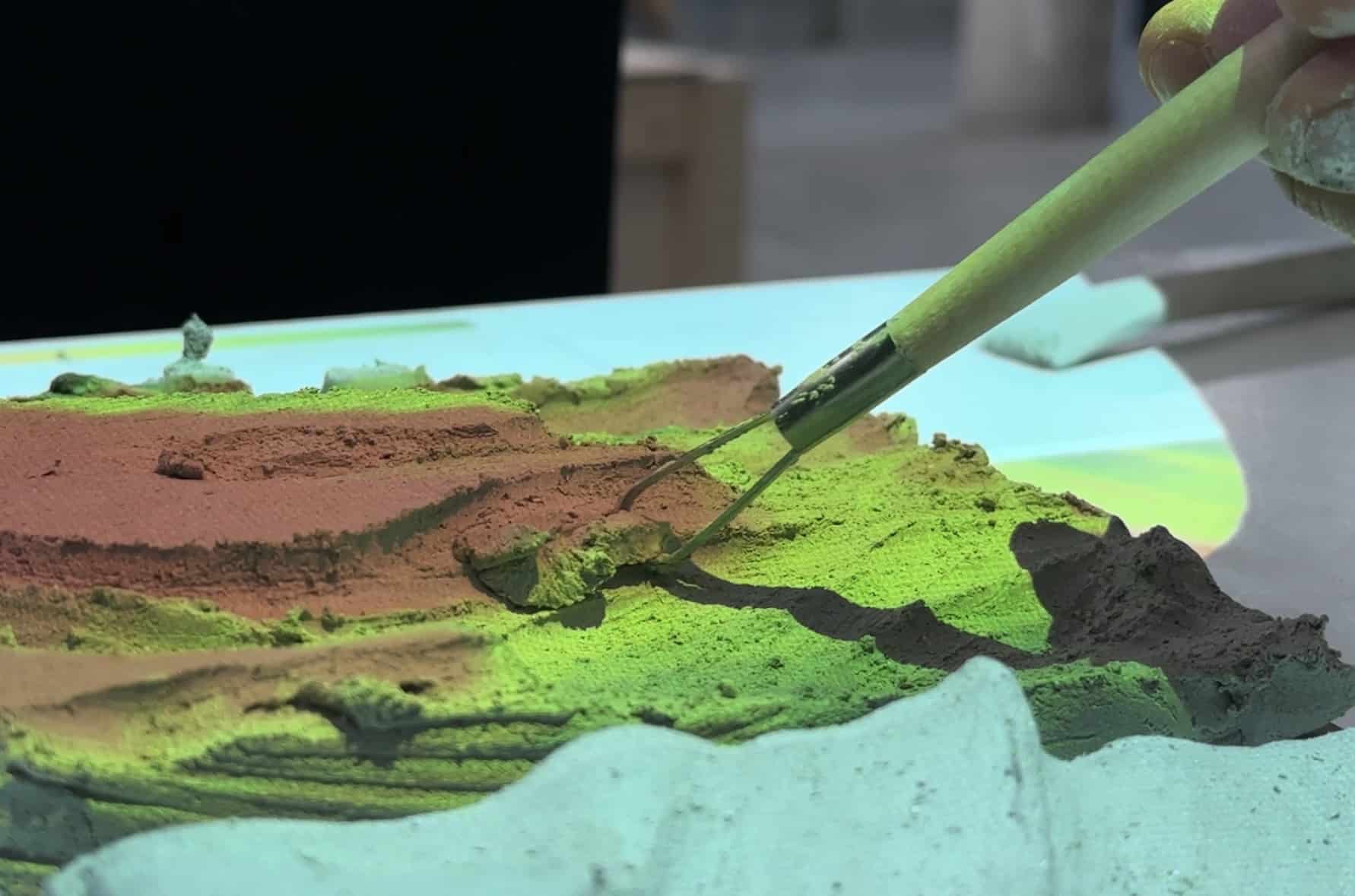
A Collaborative Human-in-the-Loop Clay Modelling System The Question What if anyone could sculpt a wall like an artist? That question sits at the center of Clay Create, a collective ceramic fabrication system where non-specialized users participate in the production of a wall of unique modules, each one manually shaped by a different person. The project … Read more