Potato Tower
Video: https://drive.google.com/file/d/1r3yyxQtWeZv6ADY_KyH7Zf4tiKYiu466/view?usp=sharing Github: https://github.com/sashakraeva/potatotower

The Master Programme in Robotics and Advanced Construction is an innovative educational format that offers interdisciplinary skills and understanding through a series of class seminars that are put into practice through hands-on workshops. IAAC gives students the opportunity to create individual studio agendas and develop Pilot Thesis Projects based on the knowledge acquired during the seminars and workshops split into 3 Modules. In this way, IAAC puts together an experimental learning environment for the training of professionals with both theoretical and practical responses to the increasing complexity of the construction sector.
Machine Learning for Robotic Fabrication
view Syllabus & Faculty
Video: https://drive.google.com/file/d/1r3yyxQtWeZv6ADY_KyH7Zf4tiKYiu466/view?usp=sharing Github: https://github.com/sashakraeva/potatotower
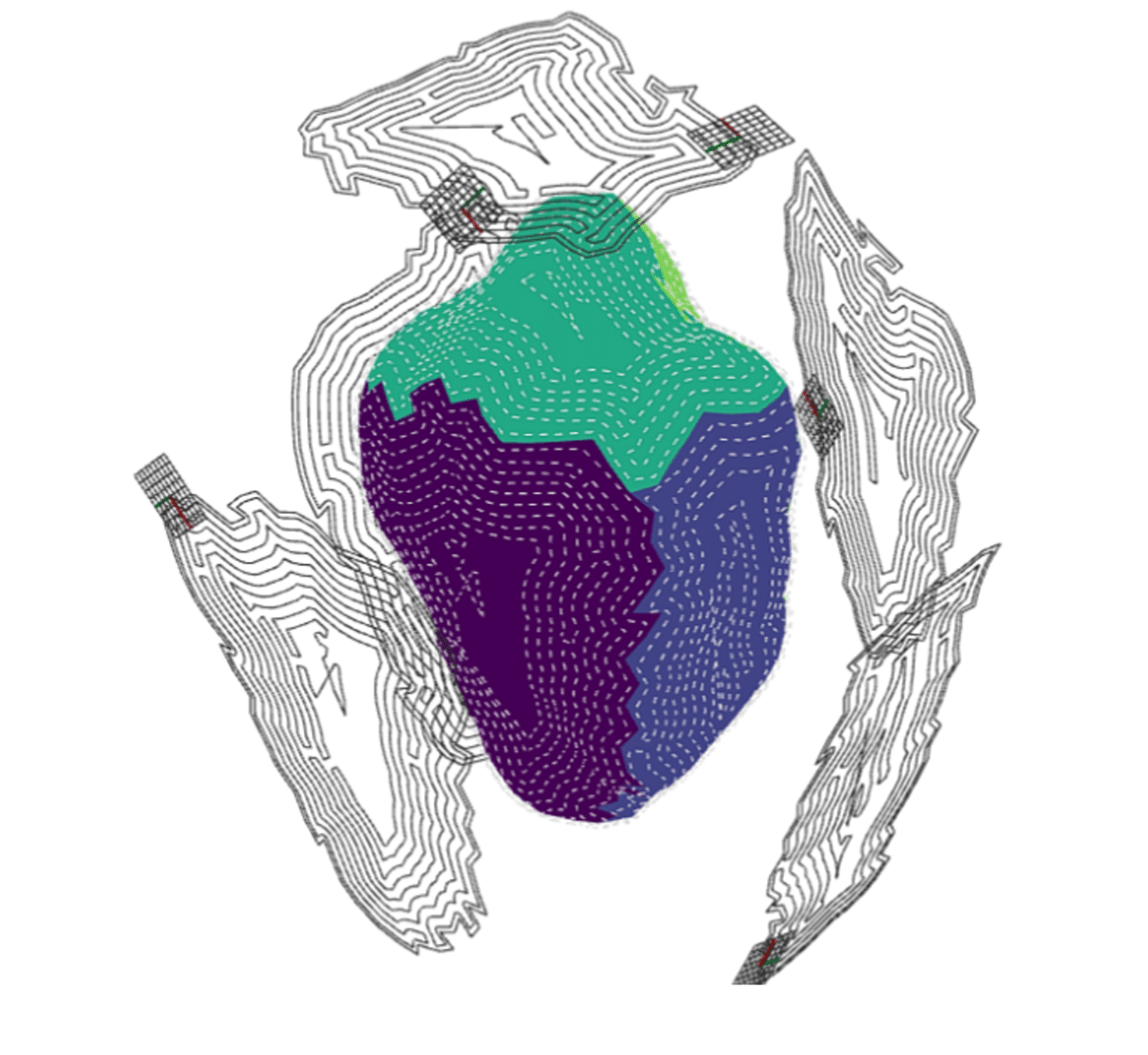
In the ongoing pursuit of efficient toolpath generation, we set out to build a modular, logic-driven system capable of planning subtractive manufacturing strategies. The framework integrated zonal segmentation, directional movement, and dynamic state awareness; its goal was adaptability and long-term scalability. While we achieved full system functionality, this initial iteration exposed the distance between a … Read more
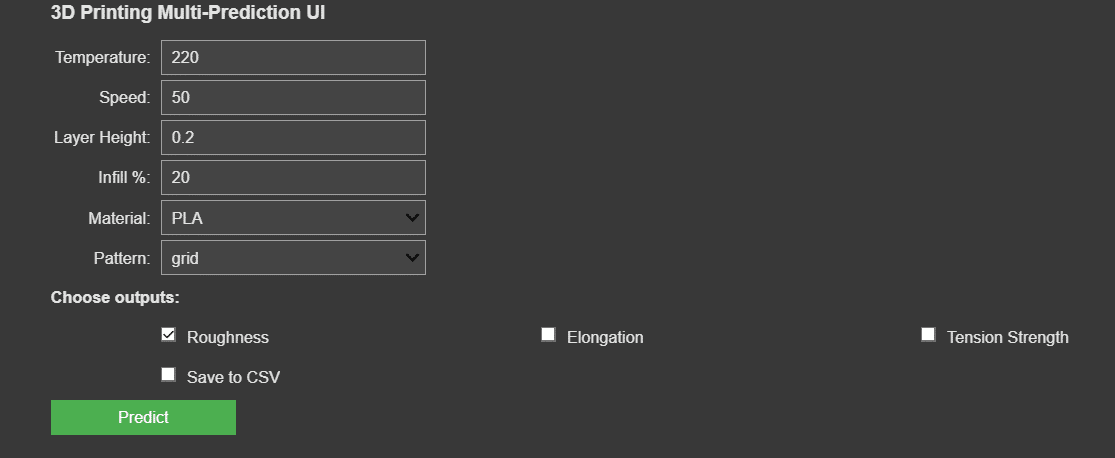
[ 1 ] FIRST QUESTIONS : The application of Machine Learning (ML) to the prediction of 3D printing parameters presents a challenge that necessitates a structured approach and raises many questions on how to approach this combination. To effectively explore this integration, it is essential to address three core questions: What are the process and the … Read more

Github : https://github.com/Clarrainl/UN_LOG-Factory | INTRODUCTION | Detecting wood defects in 3D-scanned logs using Machine Learning In the timber industry, a significant portion of wood gets discarded due to irregularities or defects that make it unusable under standard practices. However, many of these logs can still be used creatively or structurally if properly understood and classified. This project … Read more
adapted from IaaC´s Artificial Intelligence Program’s study of machine learning for robotic pick and place. (https://blog.iaac.net/reinforcement-learning-for-robotic-pick-and-place/research). Github Repository. https://github.com/LaurenD66/ROS-GridWorld-RL-with-Obstacles In a recent study by IaaC´s Artificial Intelligence Program, students used reinforcement learning models to train an (robotic) agent to move through a space defined by a simple grid from an origin to a goal, while … Read more
