Anatomy of a Machine – SPILL
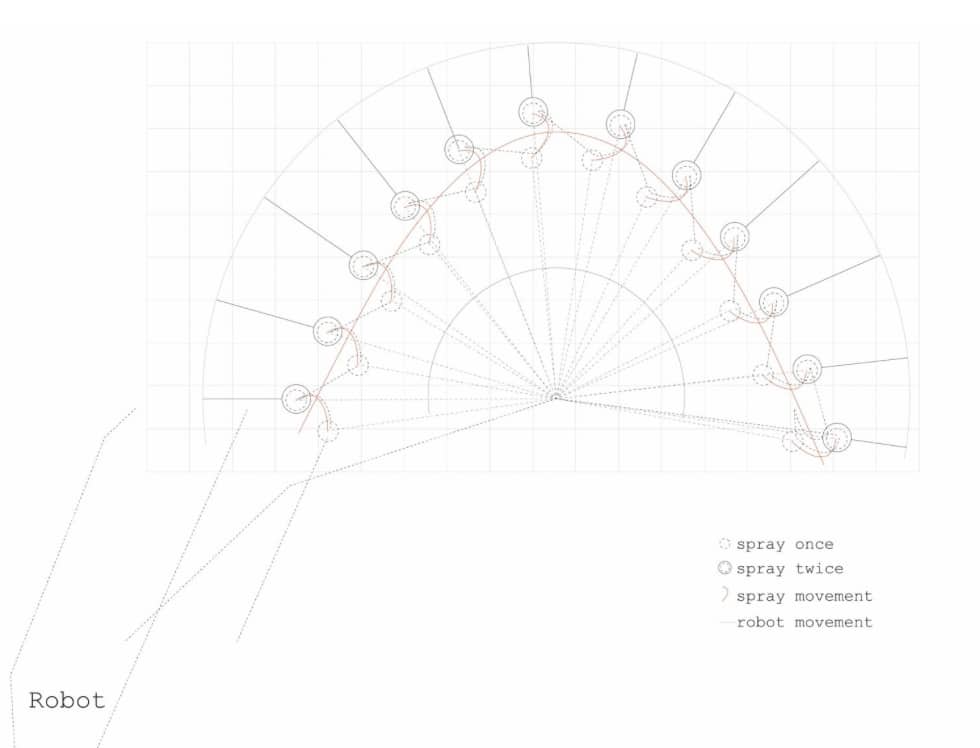
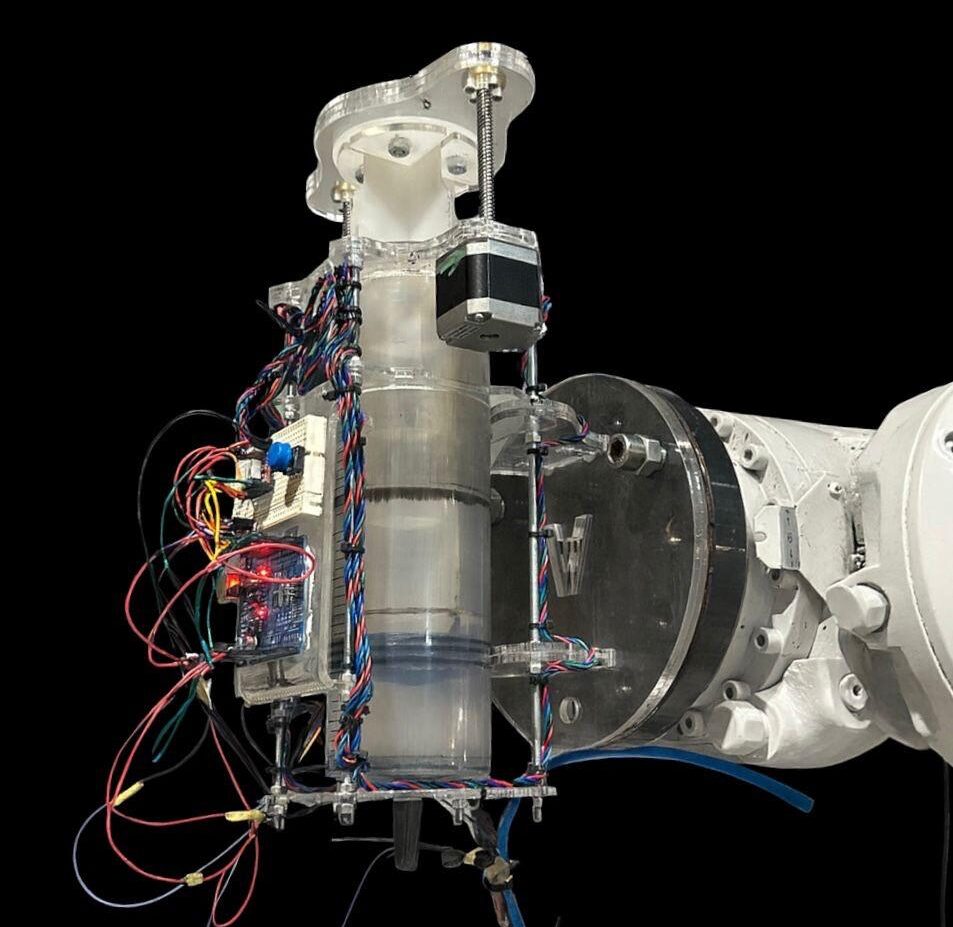
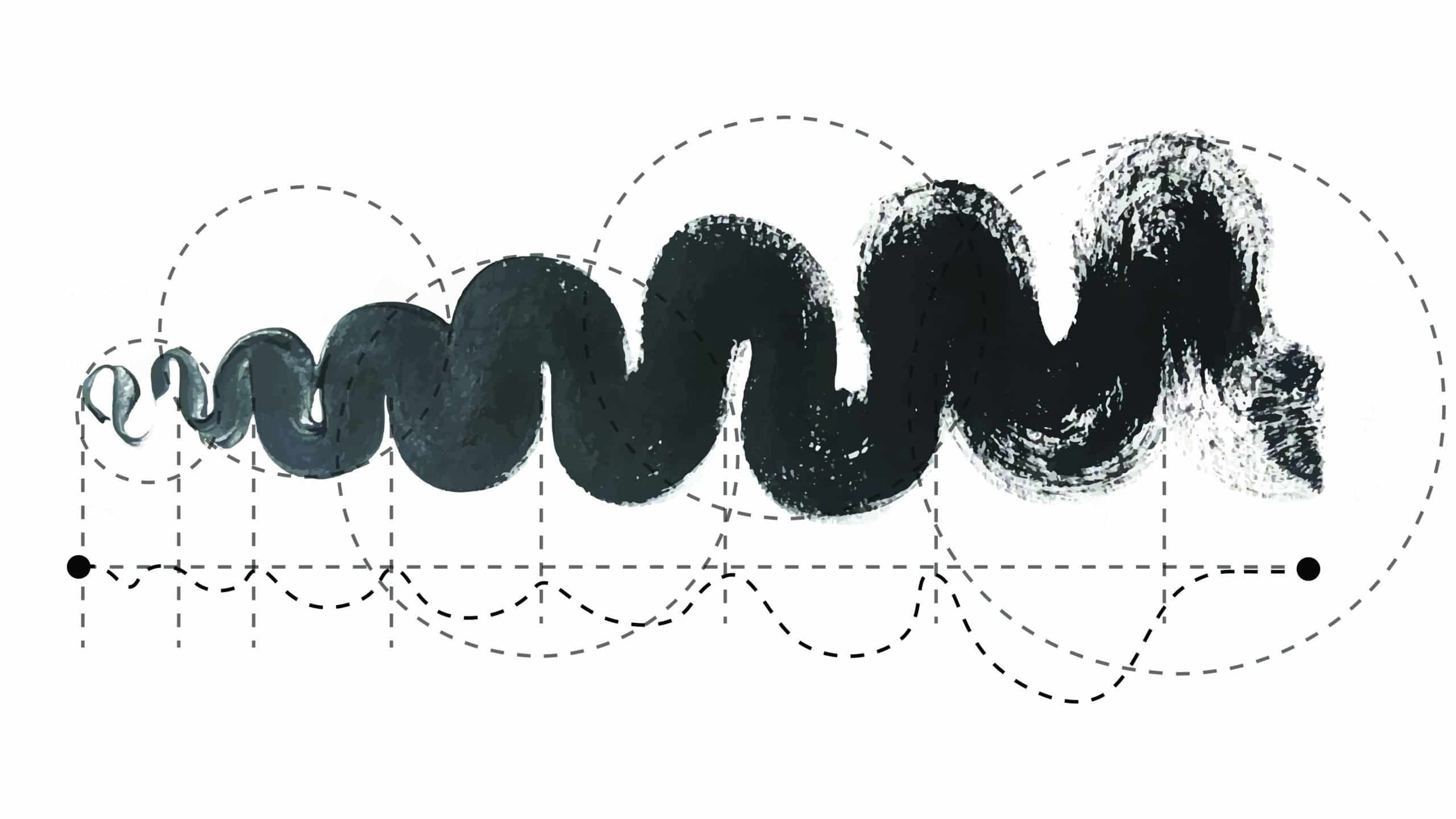
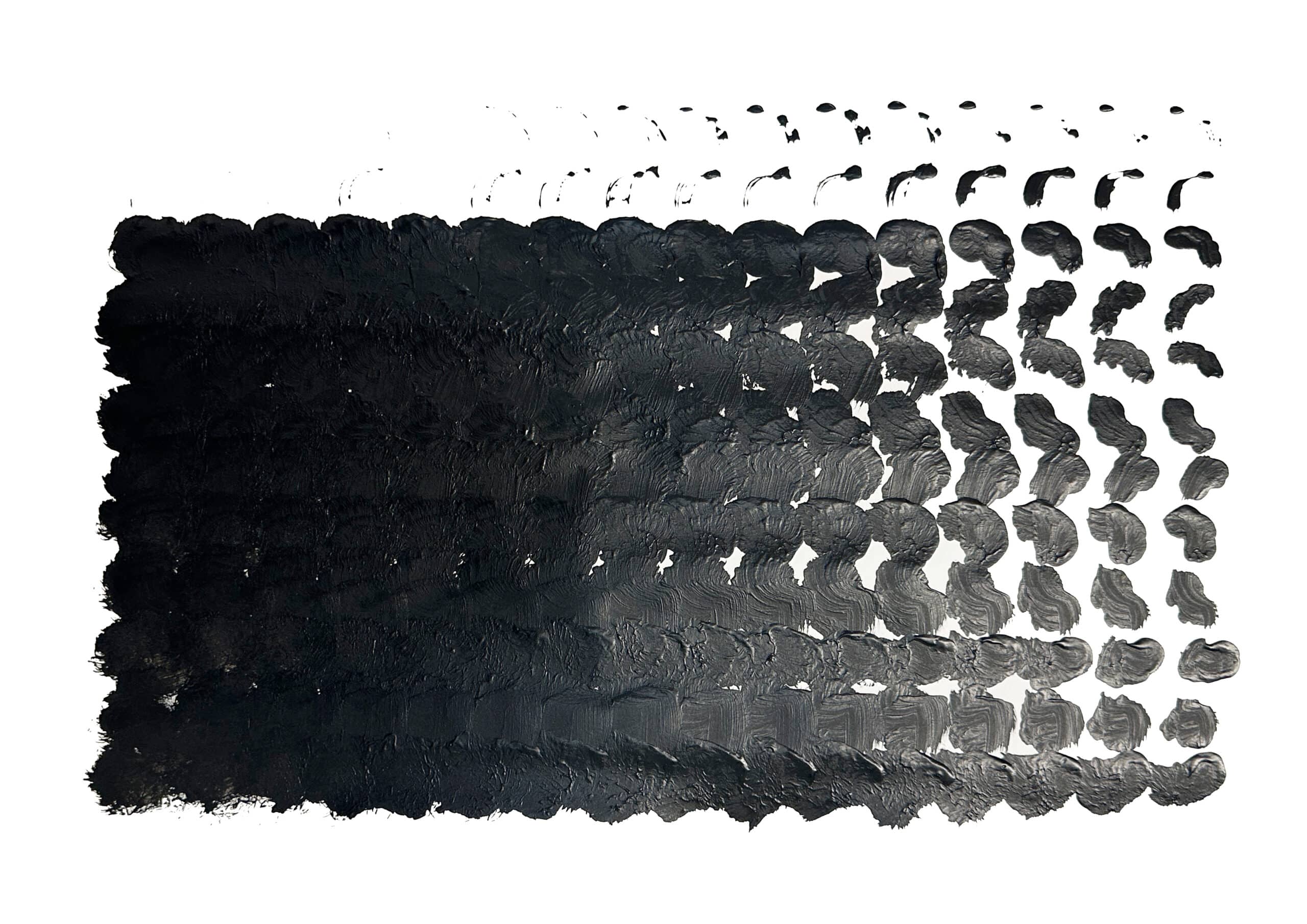
In the second exercise of Anatomy of a Machine, our goal was to understand how a robot expresses itself through material behavior. Instead of carving or shaping solids, we explored how liquid material behaves when actuated, accelerated, and released through a controlled spraying mechanism. “Spill” became a study of force, viscosity, height, angle, and timing … Read more