
INTRO
As part of the “Anatomy of a Machine – Shape” course, we engaged in an exercise that explores the possibilities of robotic material manipulation through various tools and techniques. Our objective was to research and experiment with sustainable, accessible, and locally available materials, applying scientific and creative principles to produce unique prototypes. This process allowed us to understand how robots apply specific forces to materials, reflecting their “anatomy” in the resulting pieces. Through this approach, we aimed to contribute to a collective archive of experiments documenting how materials respond and transform under different robotic conditions and configurations.
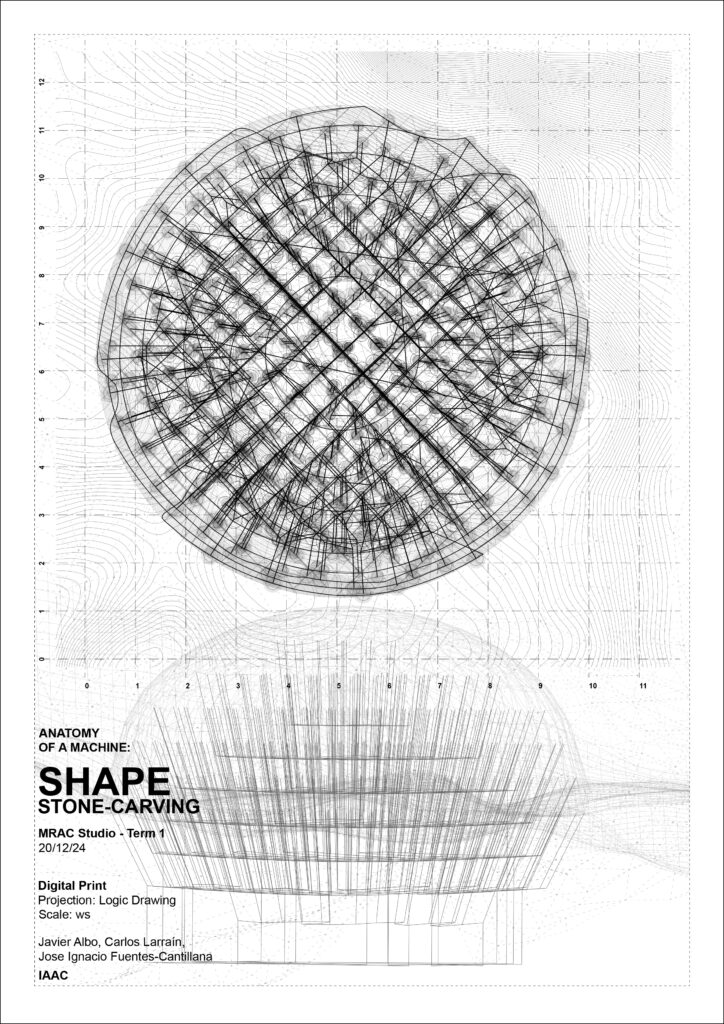
SHAPE 01 _ ROCK
ROBOTIC PROCESS : CARVING
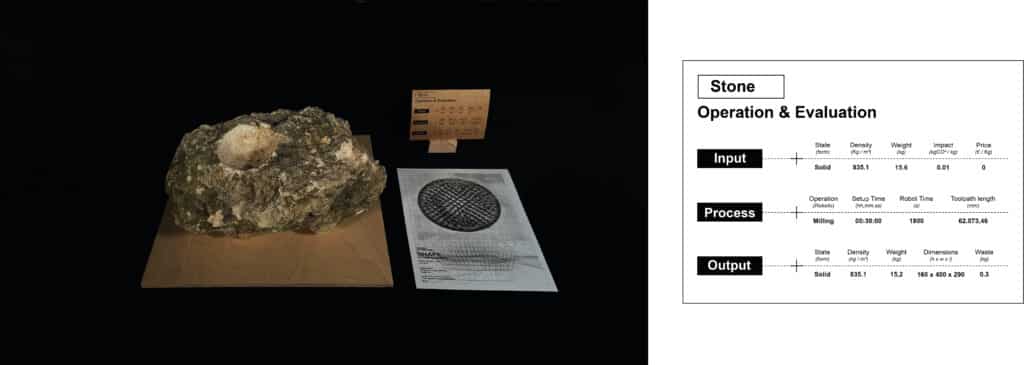
The process involves chiseling stone using a pneumatic hammer to sculpt the stone into the desired geometry. Through multiple perpendicular approaches to the stone’s surface, the pneumatic hammer utilizes the pressurized air supplied by the robot to break the stone into small fragments.
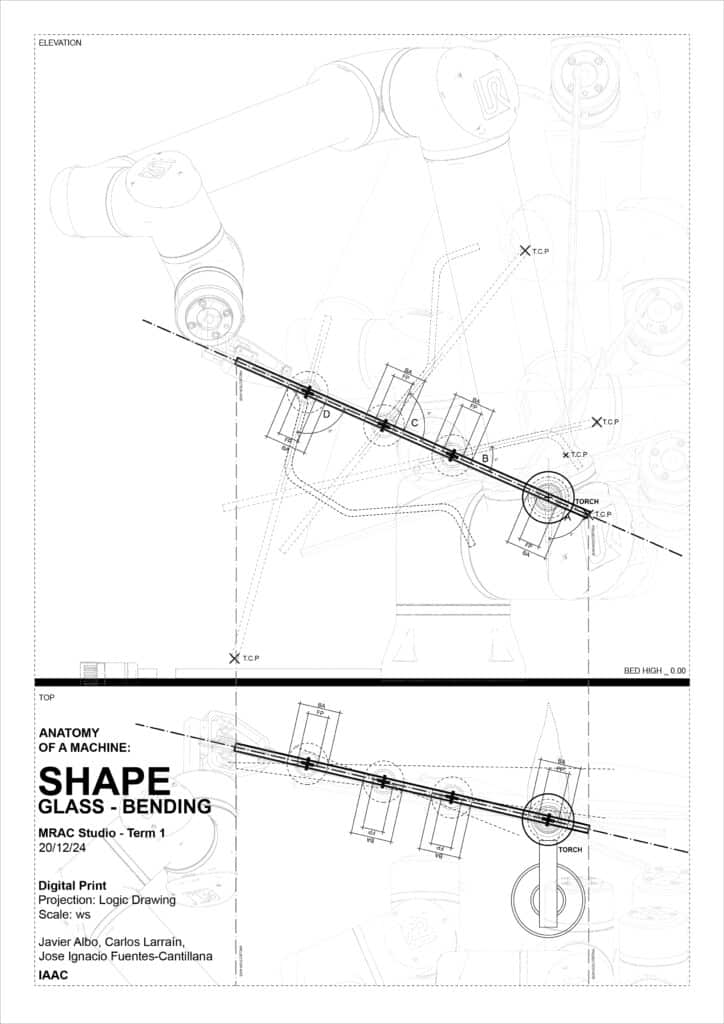
SHAPE 02 _ GLASS
ROBOTIC PROCESS: BENDING
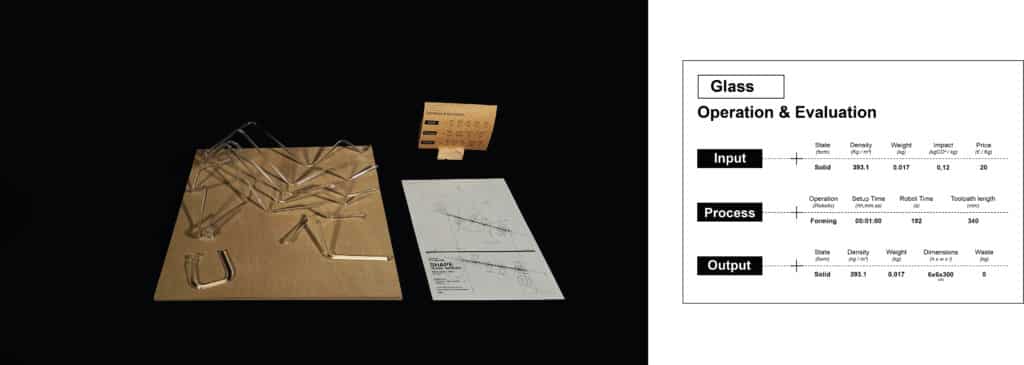
The exercise involved using a robotic arm to manipulate glass rods. These rods were placed by the robot in predefined positions, angles, and specific points within a framework. Once positioned, the rods were heated in a controlled manner. The heat, combined with the action of gravity, caused the glass to bend naturally into the desired configurations. This method allowed for the efficient and repetitive replication of a specific pattern.
SHAPE 03 _ PLASTER
ROBOTIC PROCESS: SPRAY – PRINTING
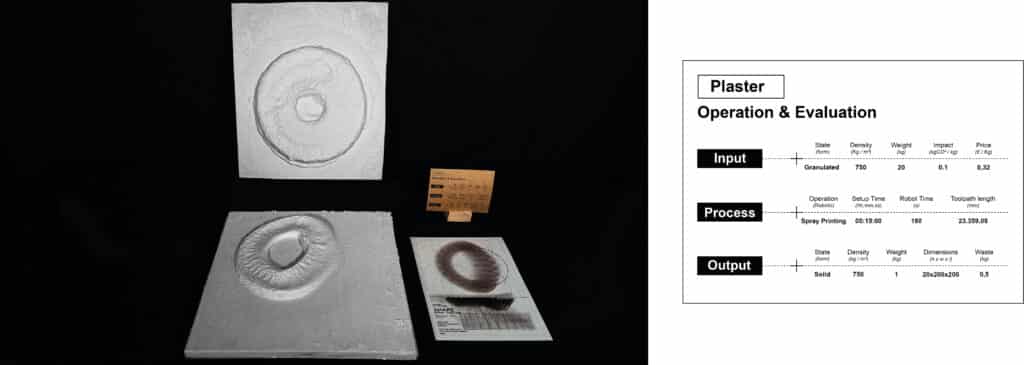
The operation involves spraying casting plaster, which, due to its density and rapid setting properties, allows for the creation of plaster volumetrics. The process essentially is a 3D printing method in which plaster is ejected from a distance along the tool’s path. To accomplish this, a custom end-effector is used, consisting of a paint spray gun equipped with an aluminum cup filled with liquid plaster, which is sprayed using pressurized air.

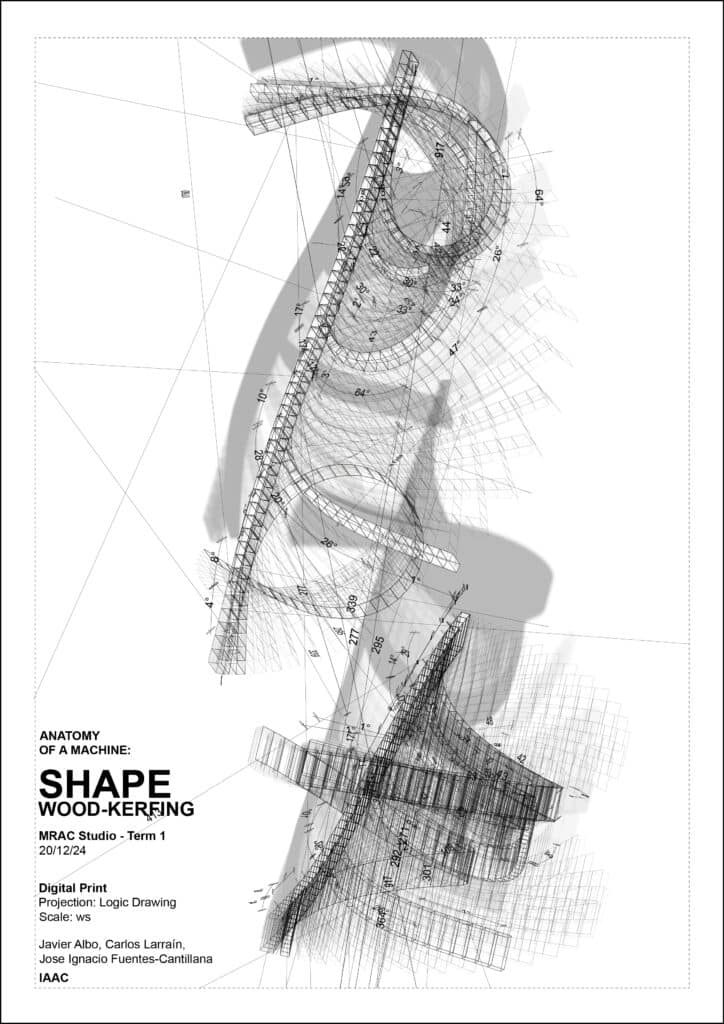
SHAPE 04 _ WOOD
ROBOTIC PROCESS: KERFING

The process explores the wood kerfing technique, where rigid wood is made flexible by creating a series of parallel cuts (kerfs) that do not penetrate completely. These cuts create spaces that enable the wood to bend in the desired direction while staying intact. The flexibility and curvature depend on the depth, spacing, and number of cuts.
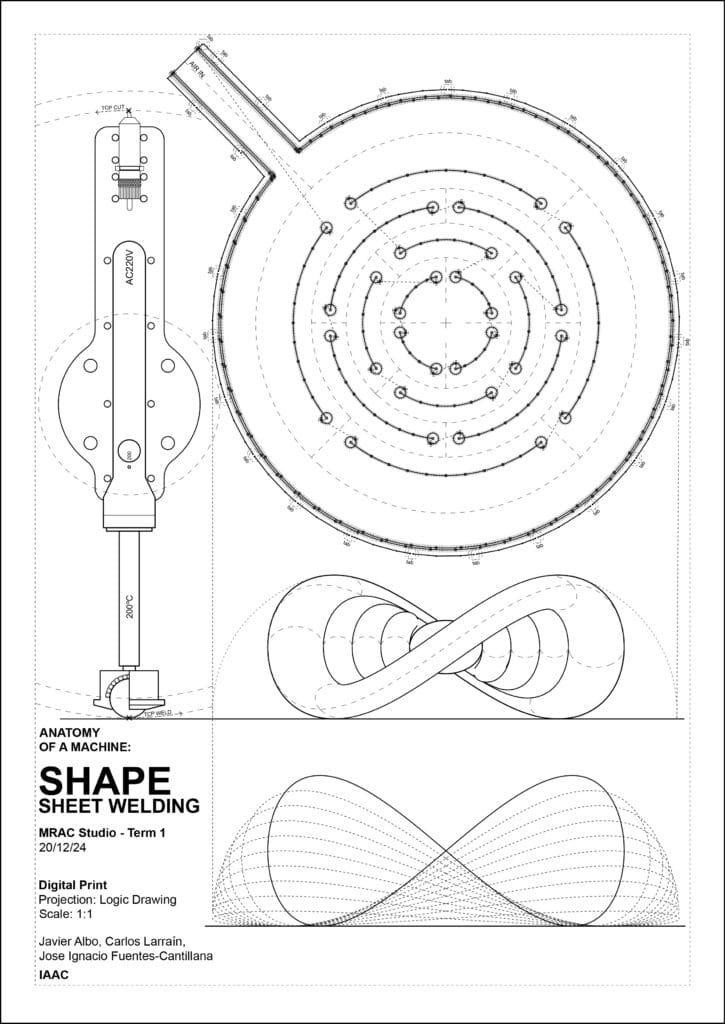
SHAPE 05 _ TAPIOCA POLYMER
ROBOTIC PROCESS: WELDING
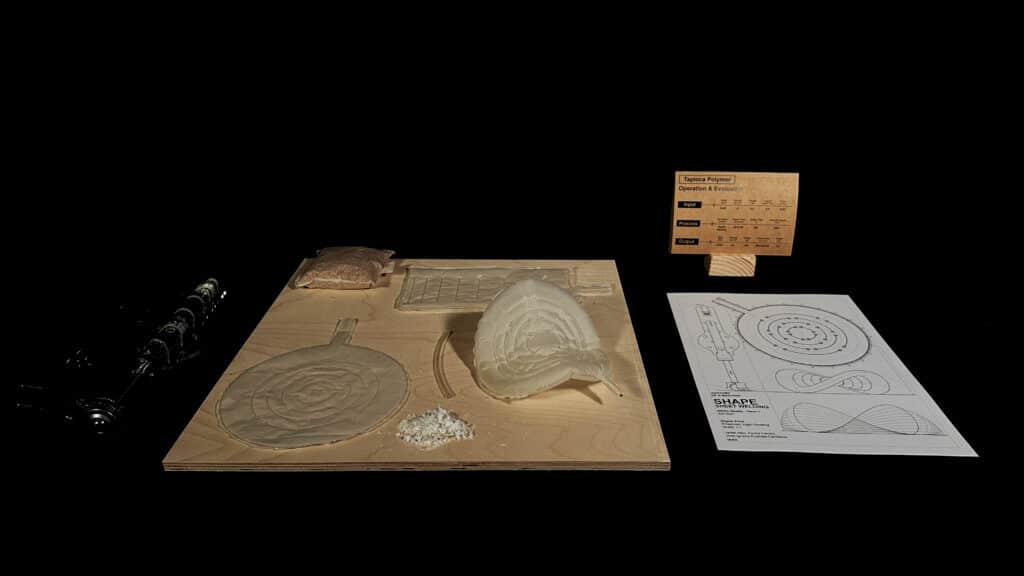
The operation involves welding and sealing two layers of yuca starch (tapioca) biopolymer with the intention of inflating them with air to create pneumatic structures. The process uses a custom-made end-effector equipped with a soldering iron, a transfer ball, and a 360º blade. The transfer ball, heated by the soldering iron, heats and presses the two tapioca layers, ensuring they melt and weld together. The end-effector then rotates 180º to cut the outer edge of the piece with the 360º blade, allowing it to be easily removed and later manually inflated
CONCLUSION
This experience enabled us to deepen our understanding of the interaction between robots, tools, and materials while consolidating a methodology rooted in experimentation and rigorous documentation. The outcomes not only showcase the plasticity and potential of the materials used but also demonstrate our ability to design custom processes and tools to optimize robotic workflows. This exercise highlights the importance of combining creativity and technical expertise to address contemporary challenges in design and construction, laying a foundation for future advancements in robotic material manipulation.
