Process Overview

Material Disassembly
Material Evaluation & Design

Generative Assembly
Human Visual Inspection
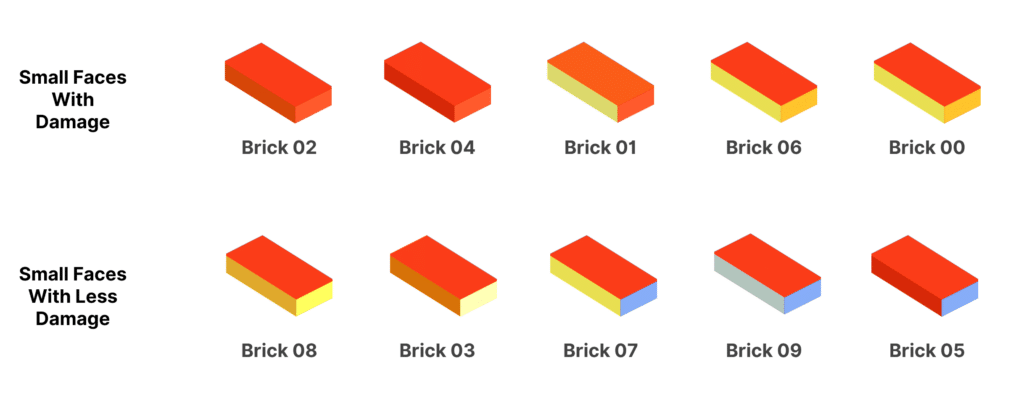
Manual Damage Categorization
First Steps
First approaches or manual Assembly
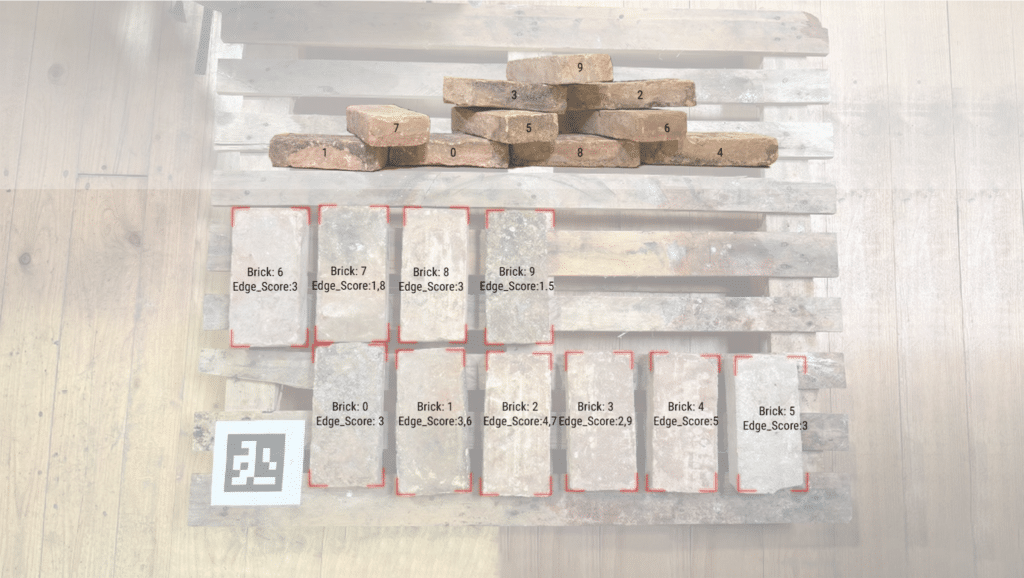
AI-Based Evaluation
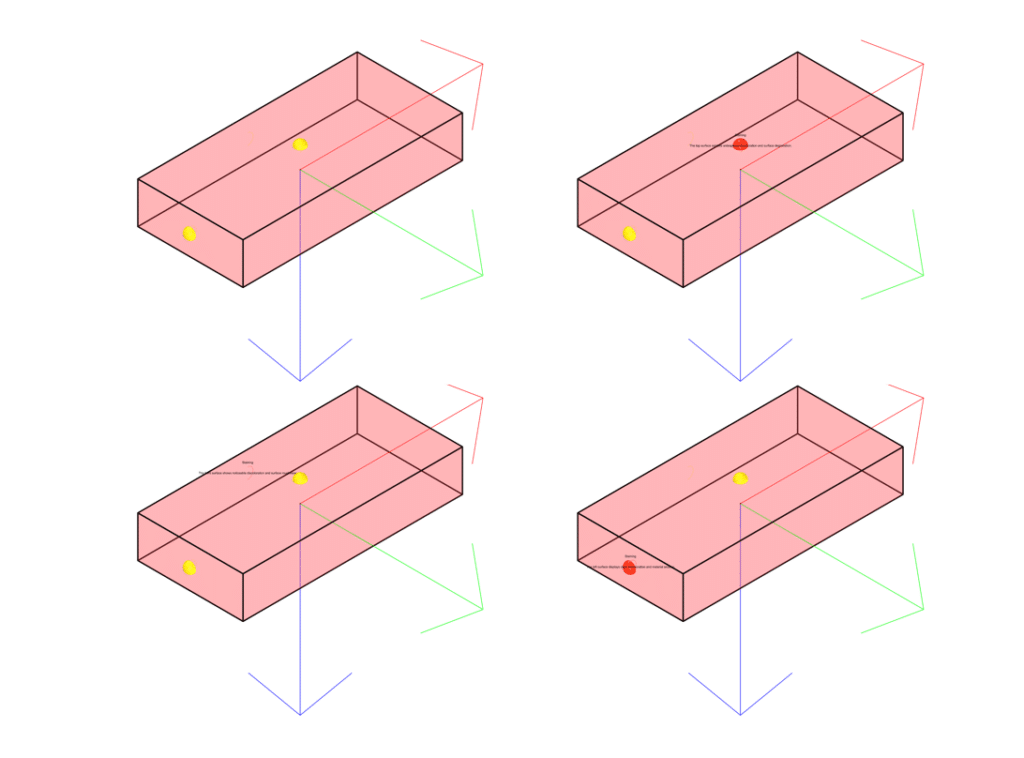
Stack 2_Brick 0
- Top surface exhibits widespread discoloration and surface degradation
- The front surface shows noticeable discoloration and surface roughness
- The left surface displays clear discoloration and material erosion
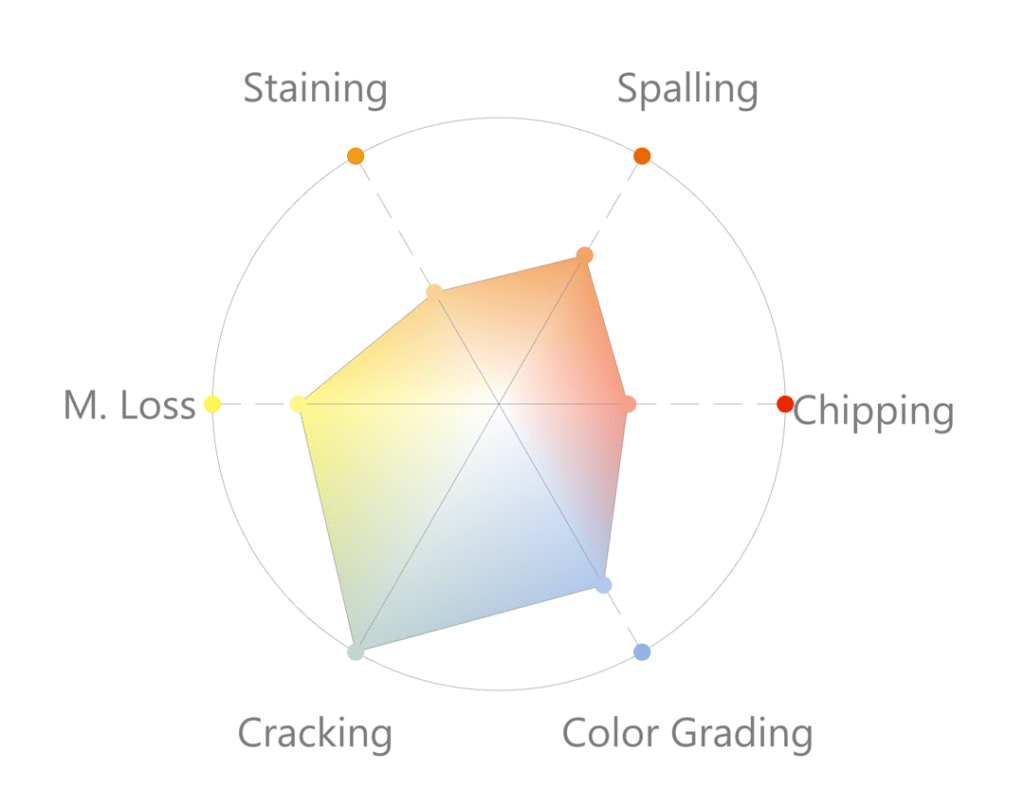
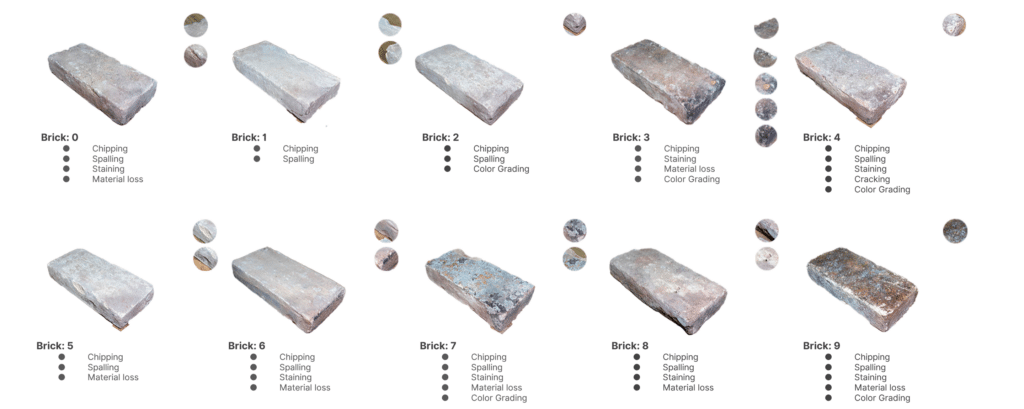
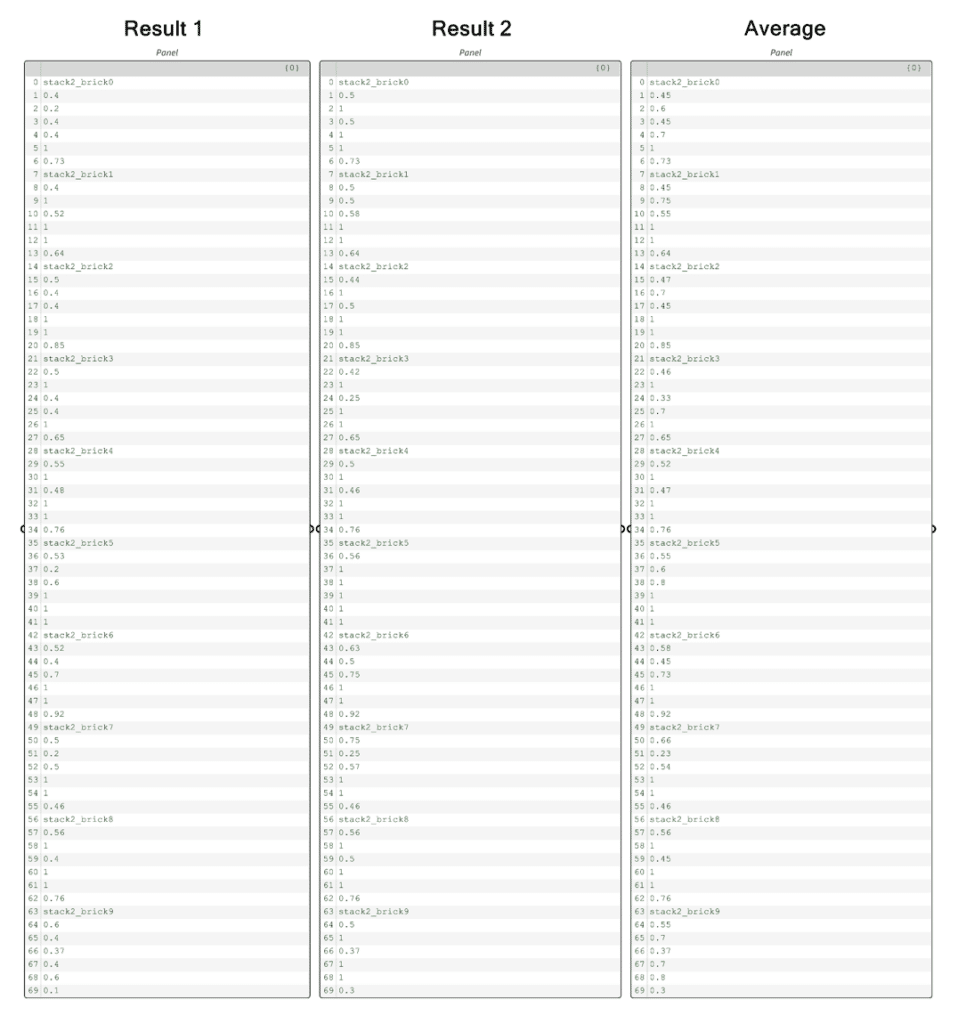
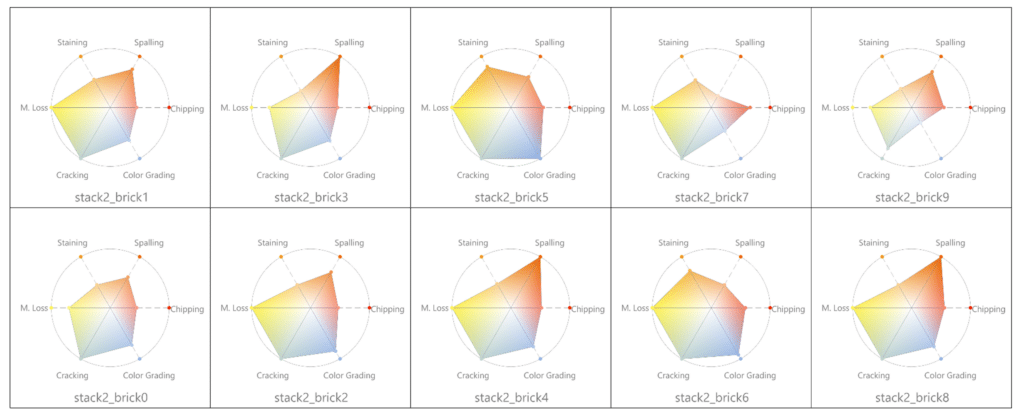
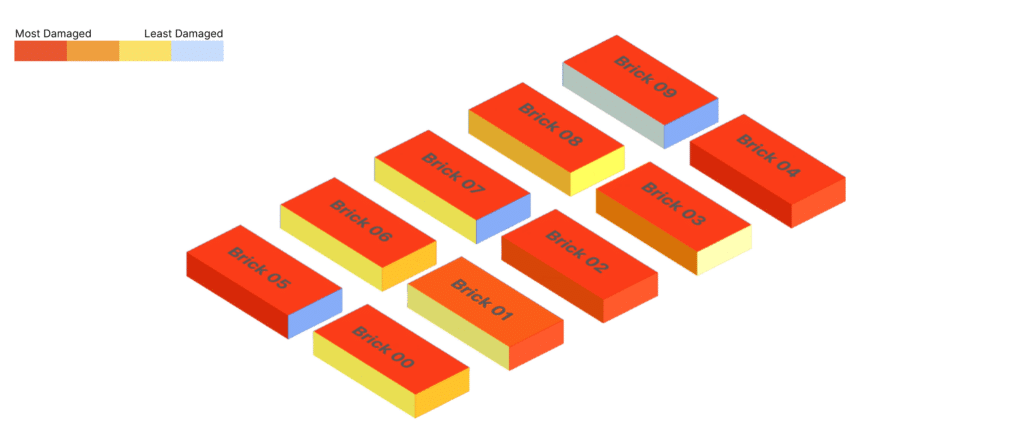
We noticed inconsistencies in the evaluation results. After finalizing the prompt, we ran the test twice for each brick, averaged the two values, and visualized the results using glyphs
Evaluation glyphs for all 10 bricks
Second Step
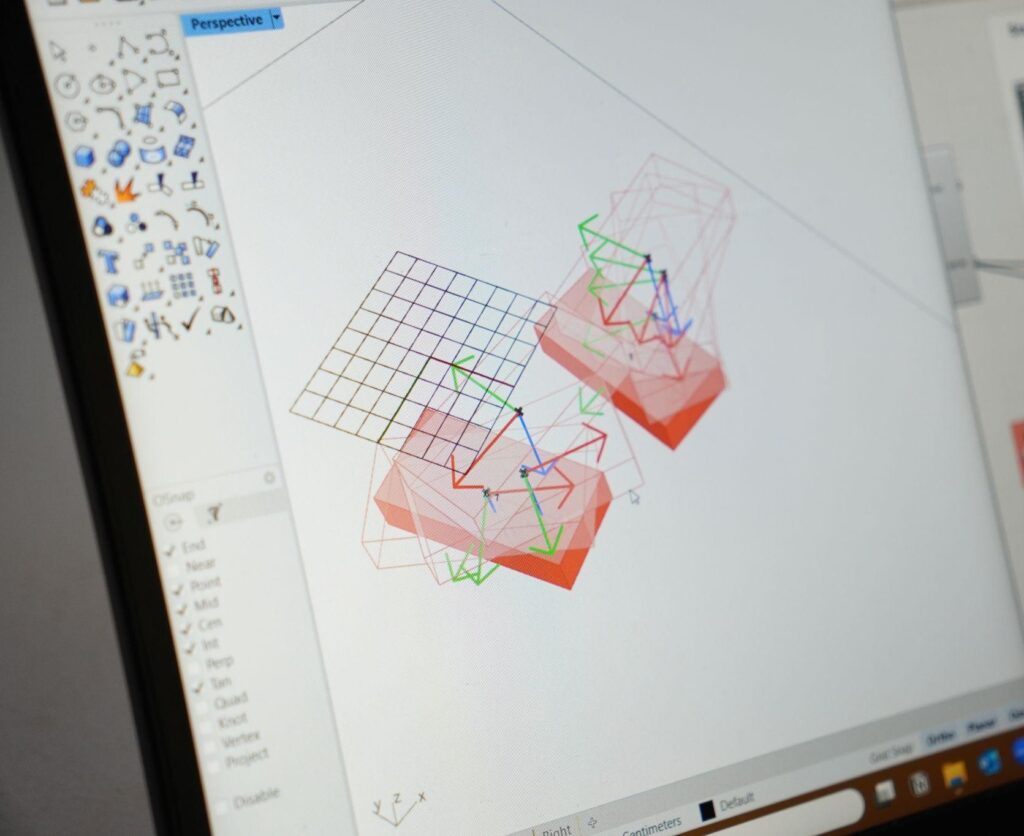
Manual Assembly on Rhino
Remapping Evaluation
We count the quantity and value of each damage to the bricks to order them
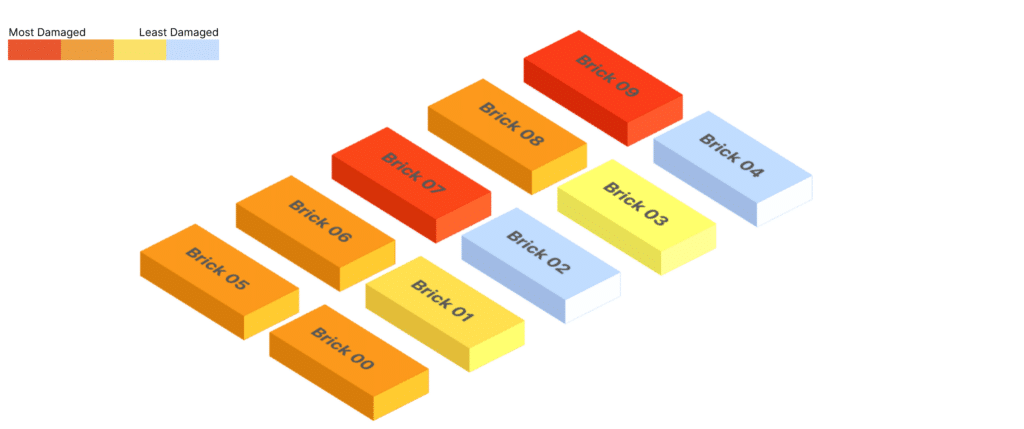
The less damaged bricks would be easier to hide, so the more damaged ones should be used first
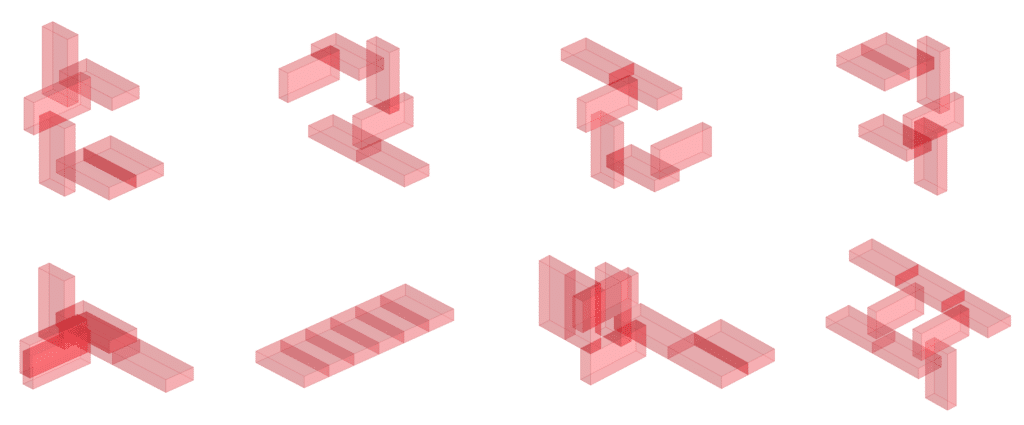
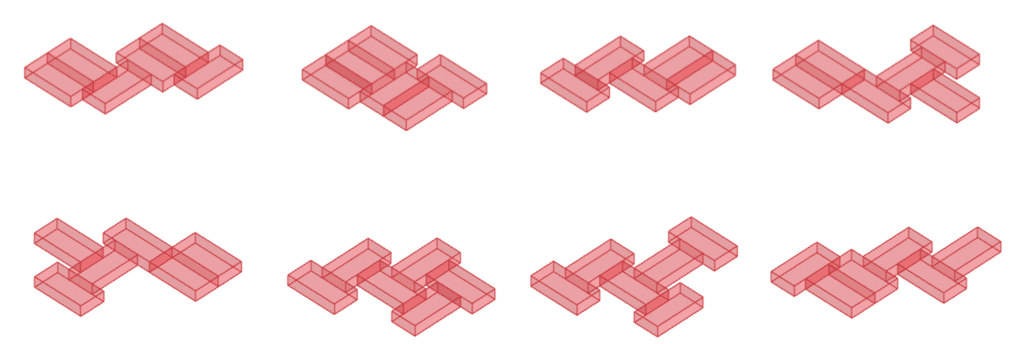
Assemblies Exploration
An iterative process of putting the bricks together in the order of the damage they have
Assemblies the bricks in order
Changing the value to each damage
First Generation
By assigning distinct values to each type of damage, we can test multiple design iterations
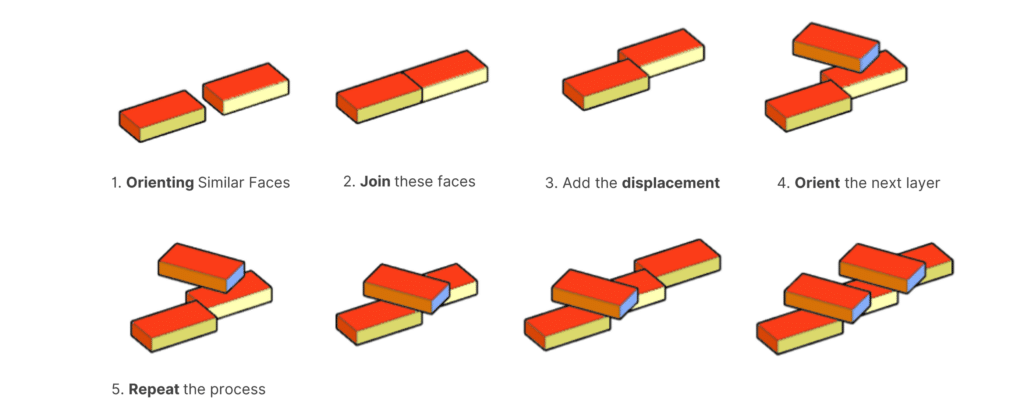
Remapping Faces Evaluation
We decided to assign a value to each face based on the damage present in corners or shared edges
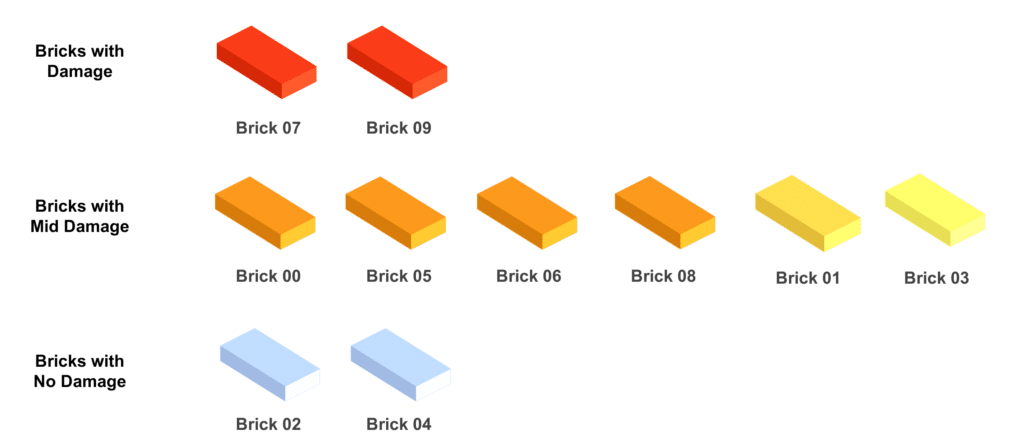
We separate the bricks into those that have similar faces, damaged or in good condition
Assemblies Exploration
With the faces sorted we assign the assembly plane based on the most damaged face
Assemblies the worst faces
Assemblies the worst similar faces
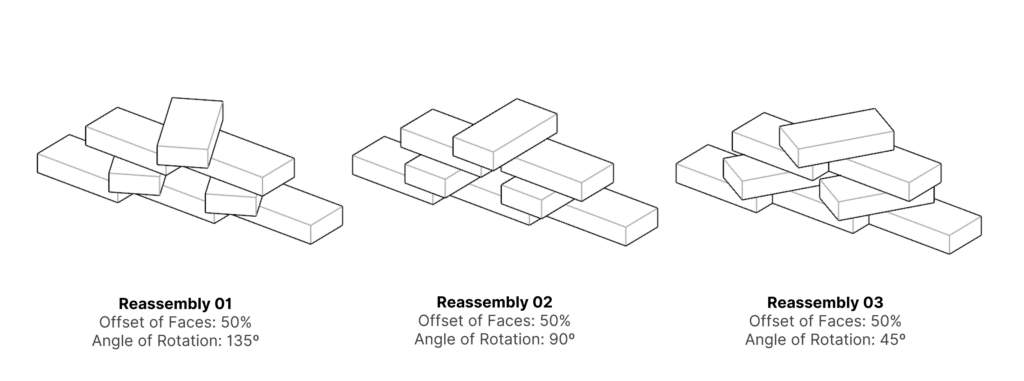
Second Generation
Aside from the top face, we categorized faces by damage severity and size to generate consistent planar reassembly patterns
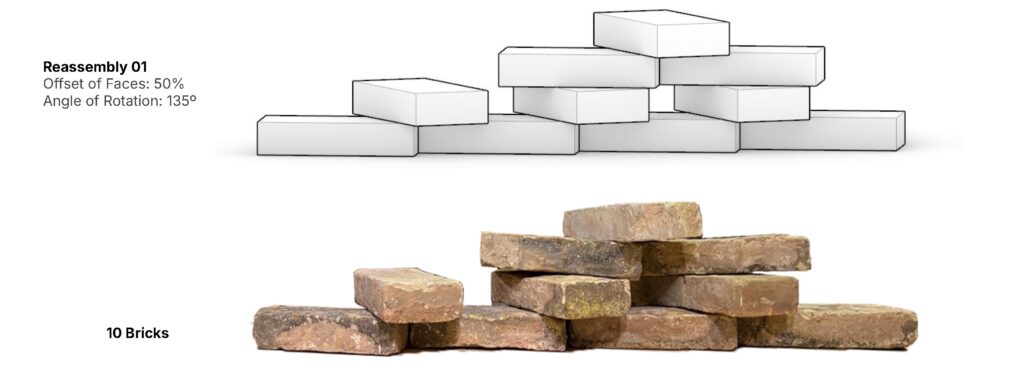
Design Inspiration
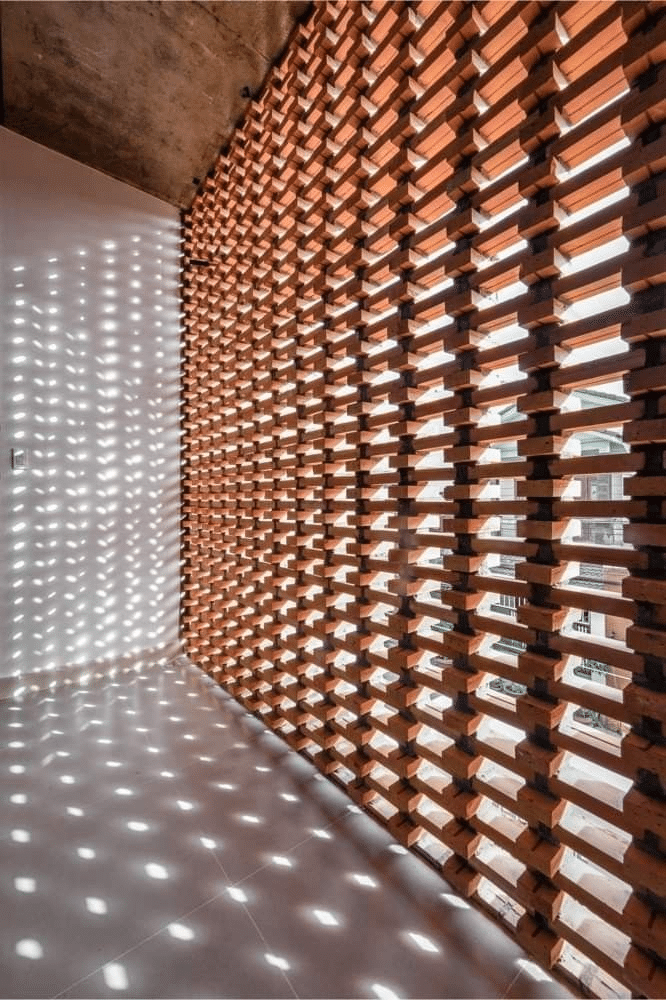
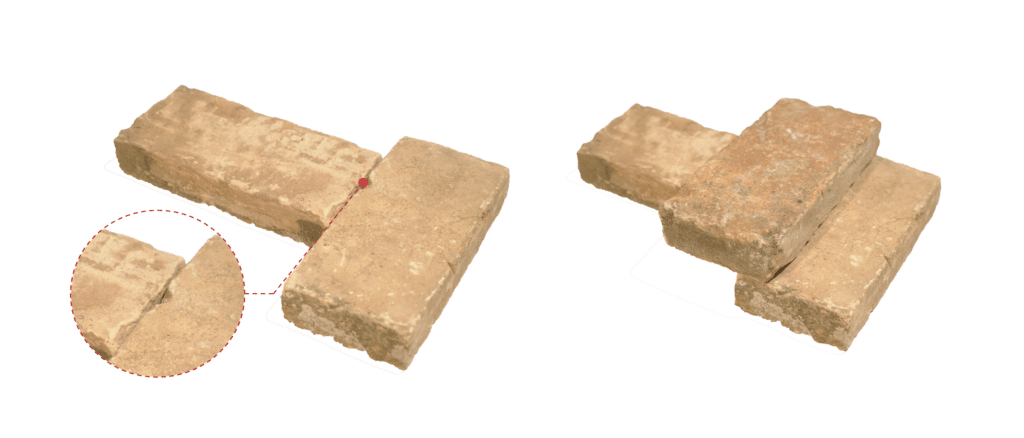
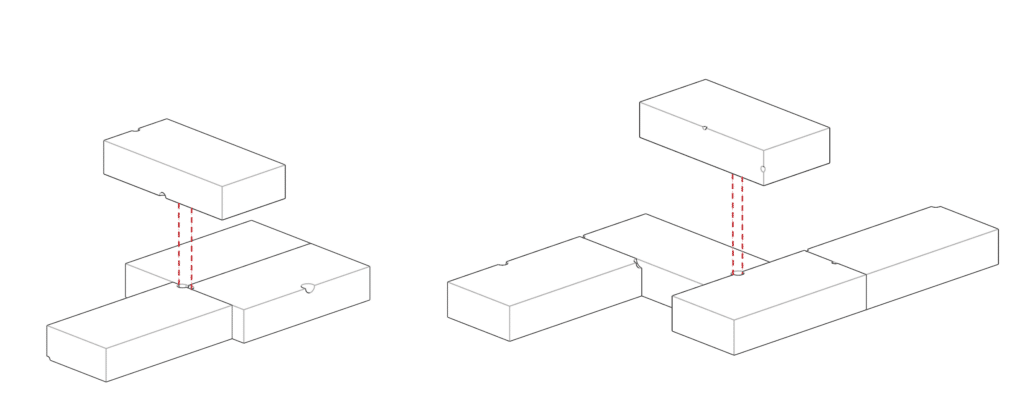
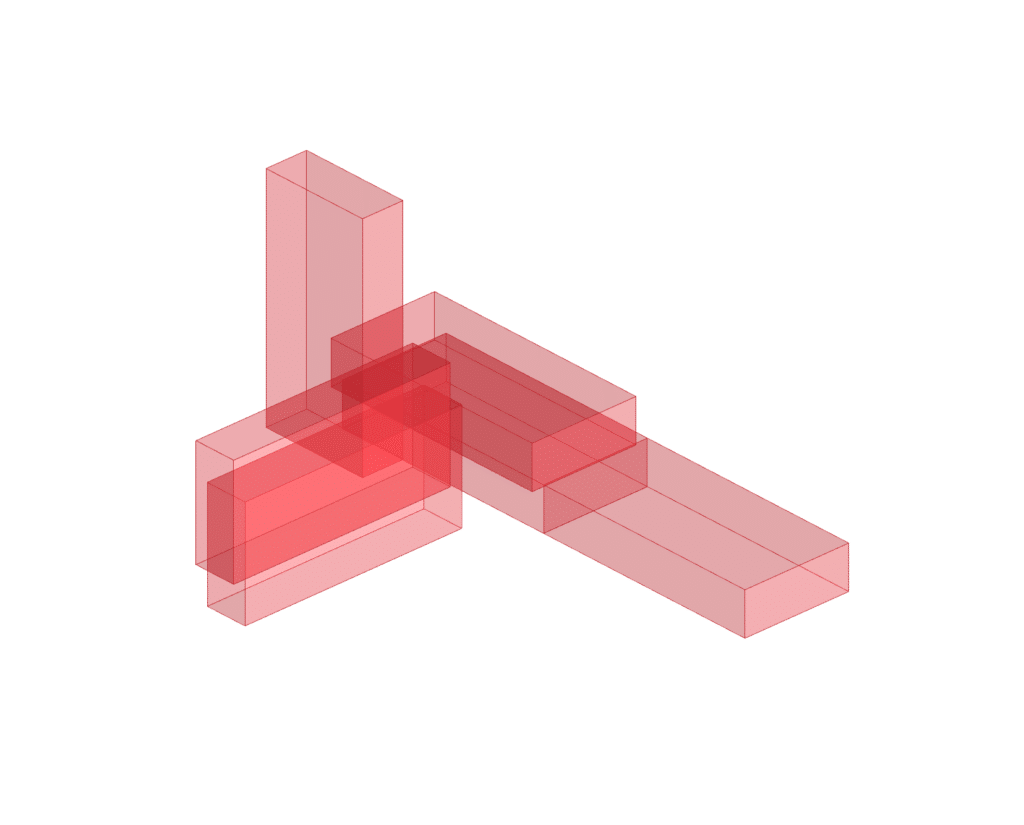
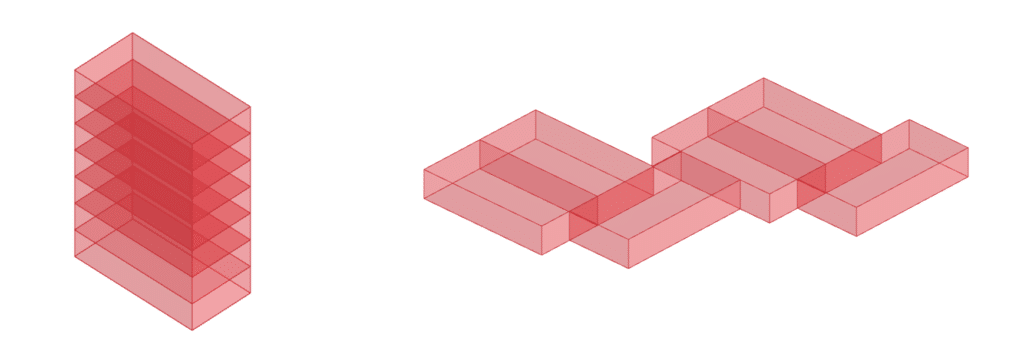
Reassembly Strategy
The logic conceals edge defects by overlapping/ pairing damaged corners
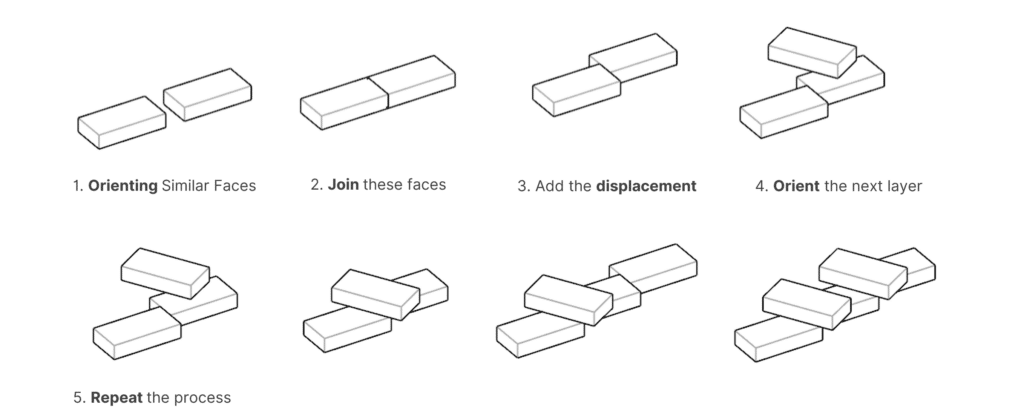
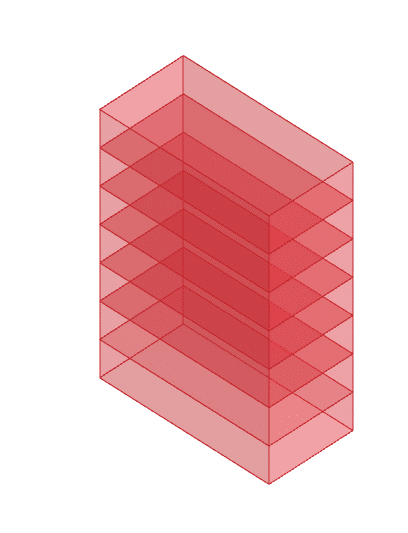
The orientation of the intermediate layers allows us to hide more or less damage to the bricks
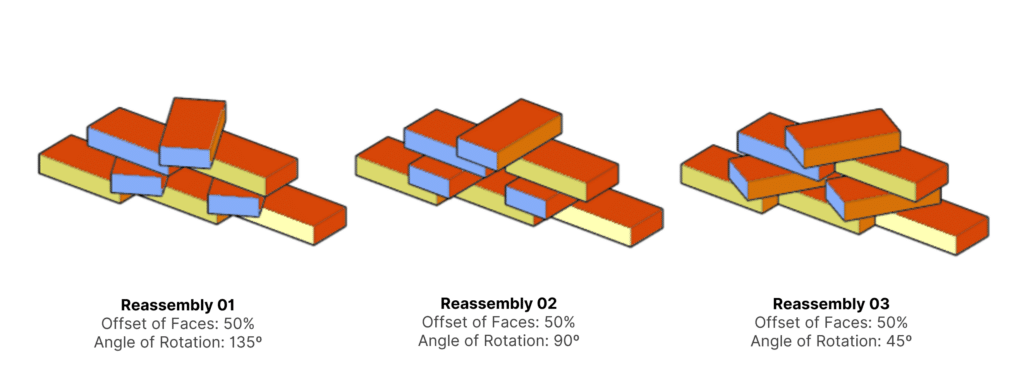
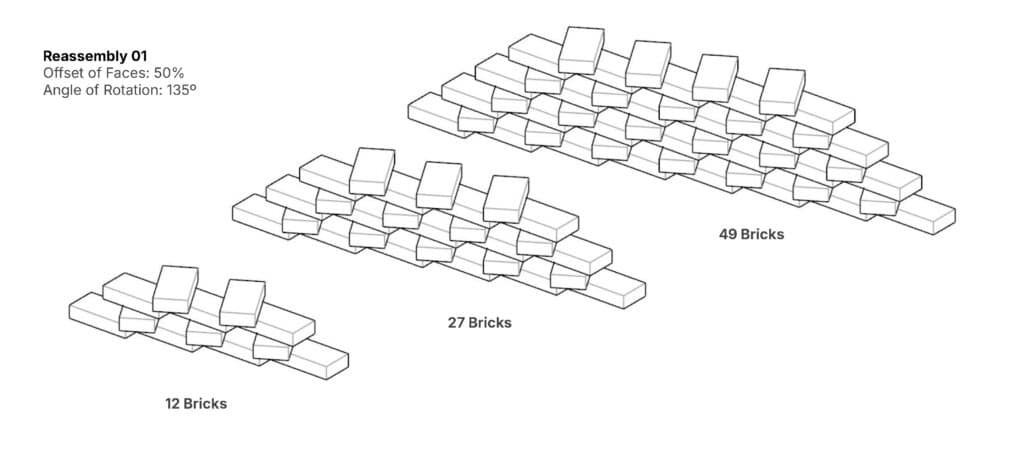
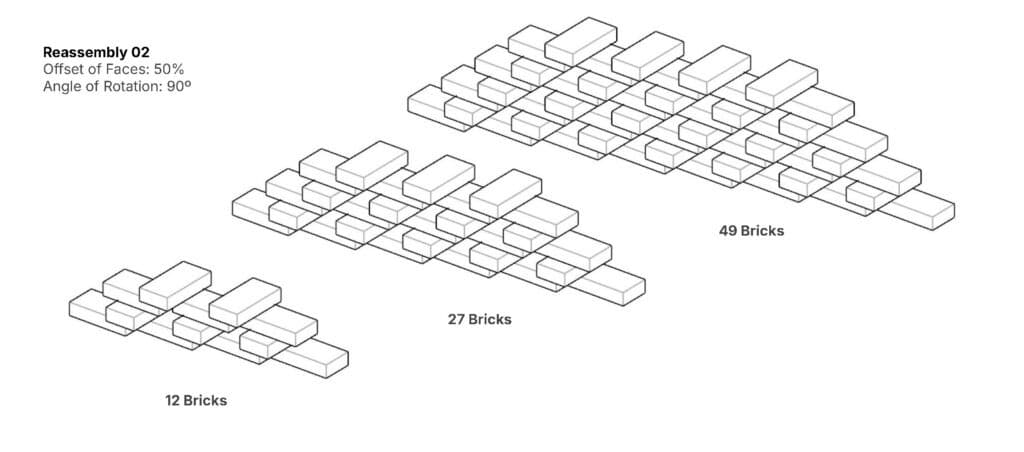
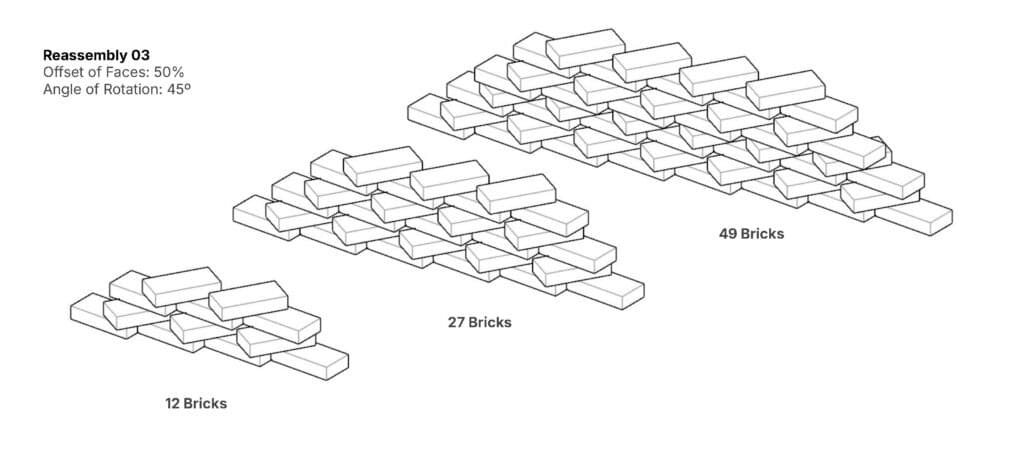
Propagation Strategy
Repetition of the pattern with more bricks
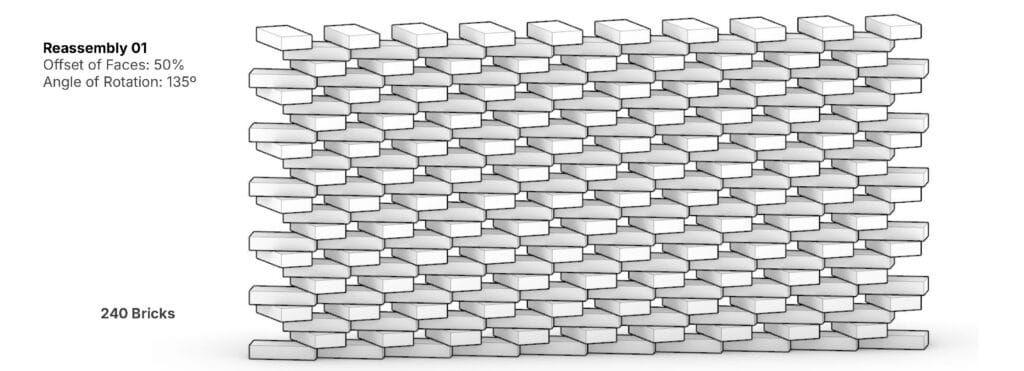
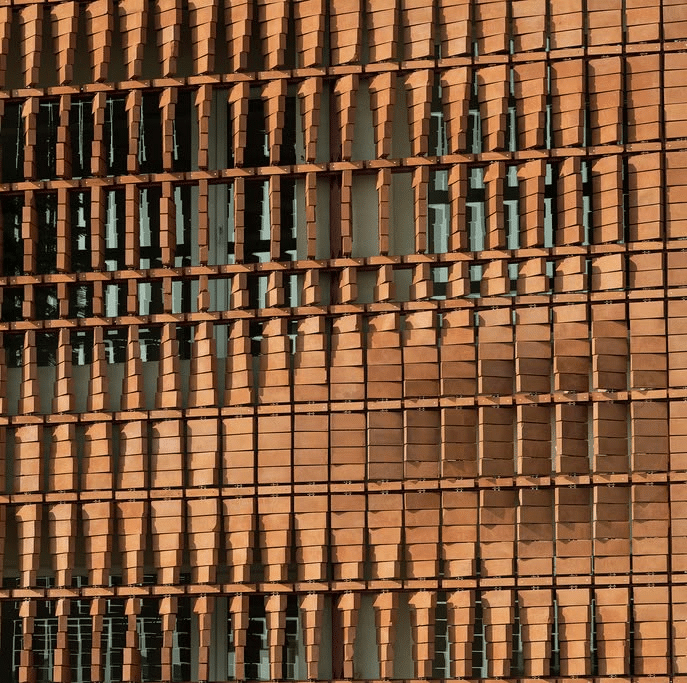
Design Output
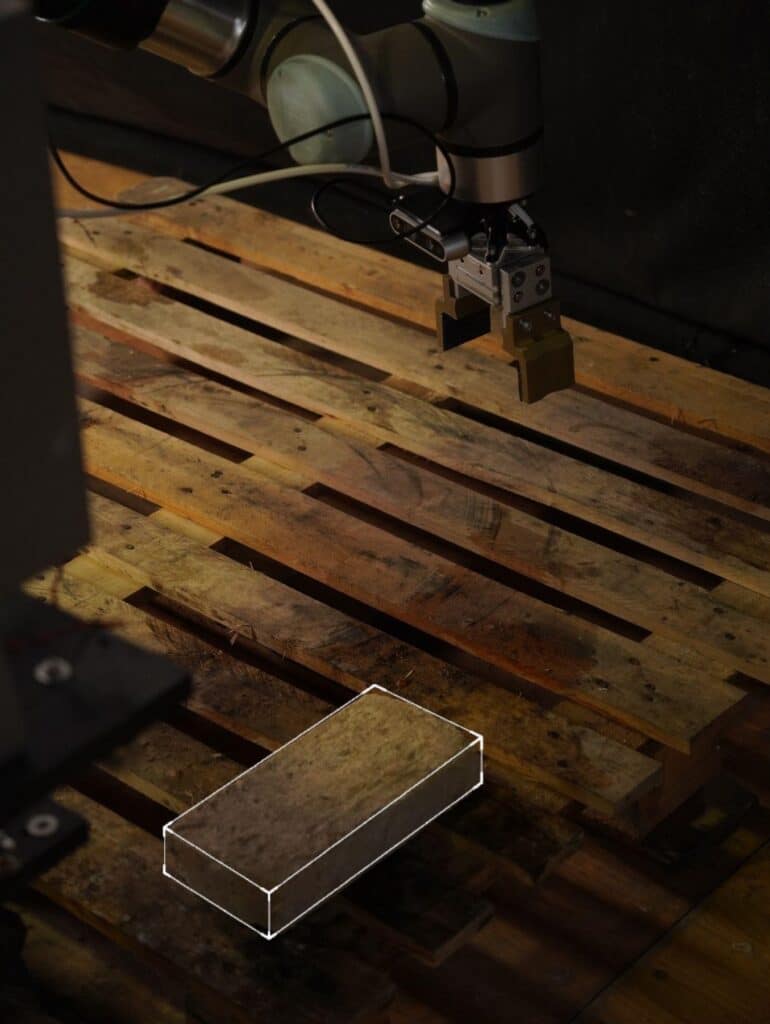
Robotic Reassembly
Robotic Manipulations
Automated Execution & Validation
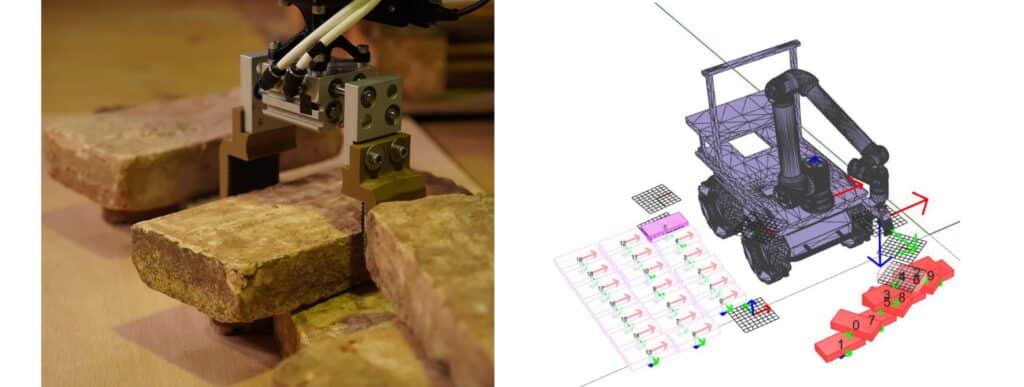
Robotic Failure
Misplacement of bricks

Shadows disrupting the brick location
Final Reassembly



Scaling Up