
Objective of this research is to create a robotic scanning workflow that creates high definition meshes for use cases in design and fabrication.
Tools
Hardware and software used in this research are –
UR Robot
Intel Realsense D405
Moveit
Industrial Reconstruction
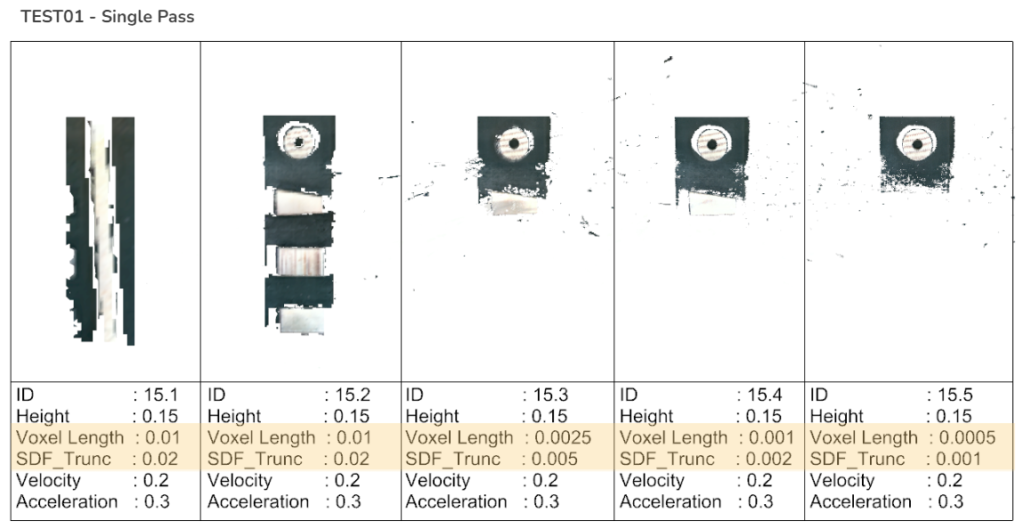
Initial Tests
The initial tests were intended at understanding the parameters of the camera to obtain an optimum settings for scanning. Below are the matrix of test results that are going to inform future steps.
Next Steps
Next steps in the research will be to create a link between a secondary camera that identifies plank edges and provides this edge points as pose estimates for motion planning. By creating this link the process can be automated and scanning irregular objects will be quick and efficient.
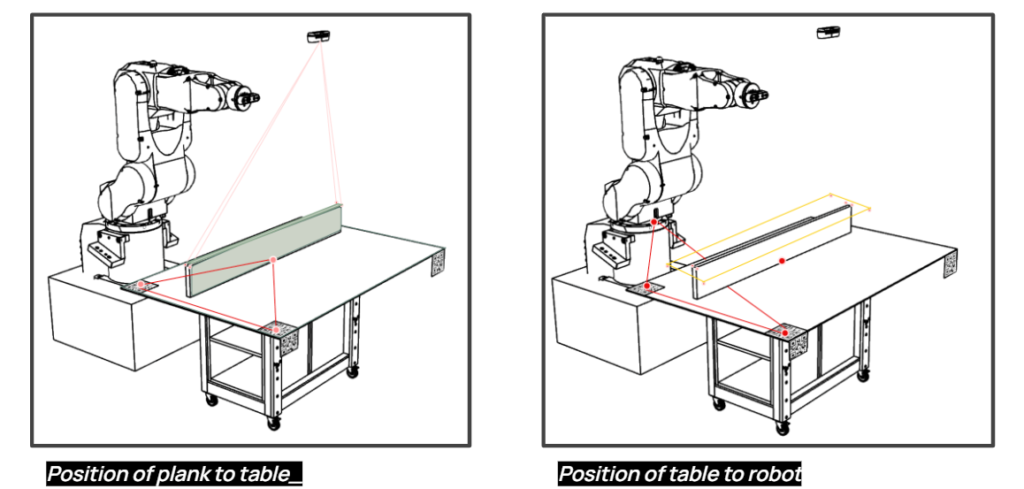
Hypothetically triangulating the position of plank with respect to table and calibrating the position of table with respect to robot should establish give translation matrix between the points detected by the secondary camera and the robot. These points can be the poses for motion planning.
