Studio: Term 2 – MRAC + MAA
For our third term MRAC paired up with MAA students to investigate how vernacular materials and techniques of Catalonia could be modernised with robotic precision to create new typologies.
Our group chose to work with Canya; more specifically Arundo Donax, Giant Reed. Two vernacular techniques we looked to explore were the use of reed in wind instruments such as the Gralla where is it heavily refined to fine layers and Barraques (the video on the right is not of a Barraques but is the same techniques) by the Ebro delta where it has been tradtionally grown and used for roof thatching since medieval times.
original video credit:
https: //www.youtube.com/watch?v=cpm7Eicl5v4
https: //www.youtube.com/watch?v=EpMnIWKDUcM
https: //www.catalogoculturalbajoaragon.es/patrimonio_musical/dulzaina-utilizada-por-wenceslao-belles/
Experiment Documentation
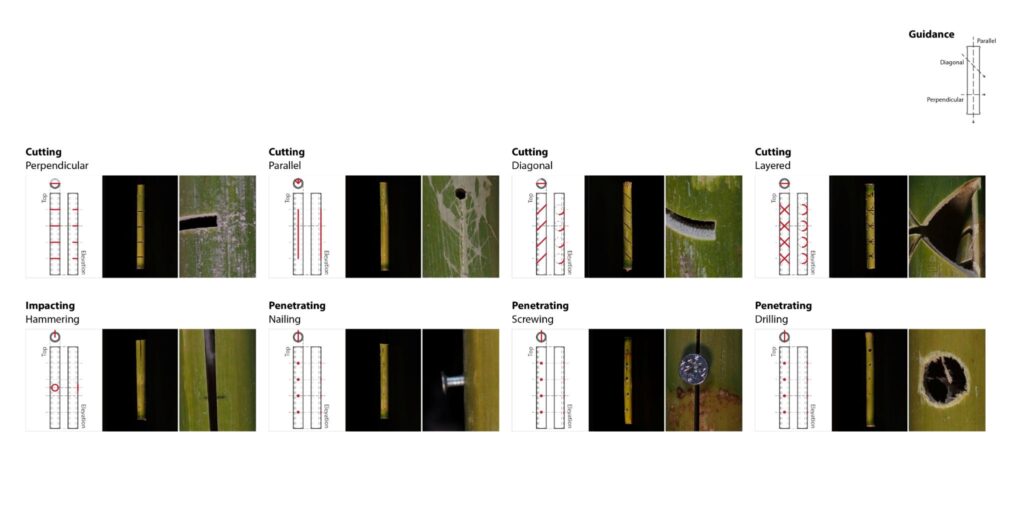
To better understand the material better before working with the robot, we began playing with the material and from here making small tests to see how the material reacts. From the examples of vernacular techniques we were interested in the material can be substracted from and refined by cutting it but also how it could be joined by additive methods such as bundling.
Early Prototypes
Aware of what was being done in the traditional vernacular and understanding how the material reacted from our experiments, we also looked to what is being done in contemporary practice. Led by firms such as CanyaViva modern techniques typically look at how the material can be bundled and bent due to the material’s natural tensile strength.
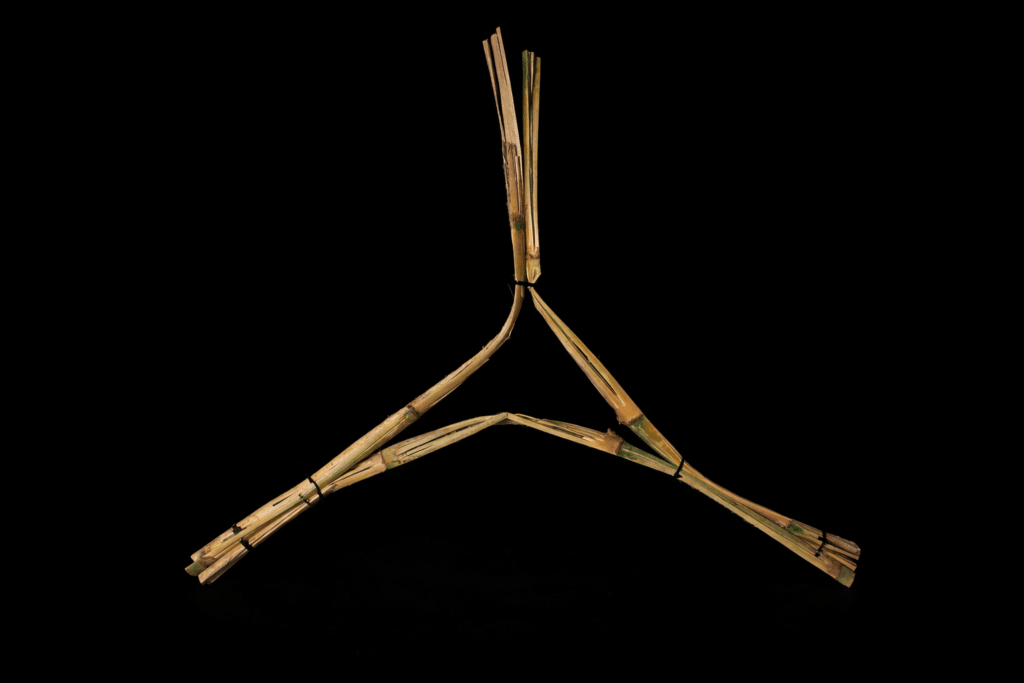
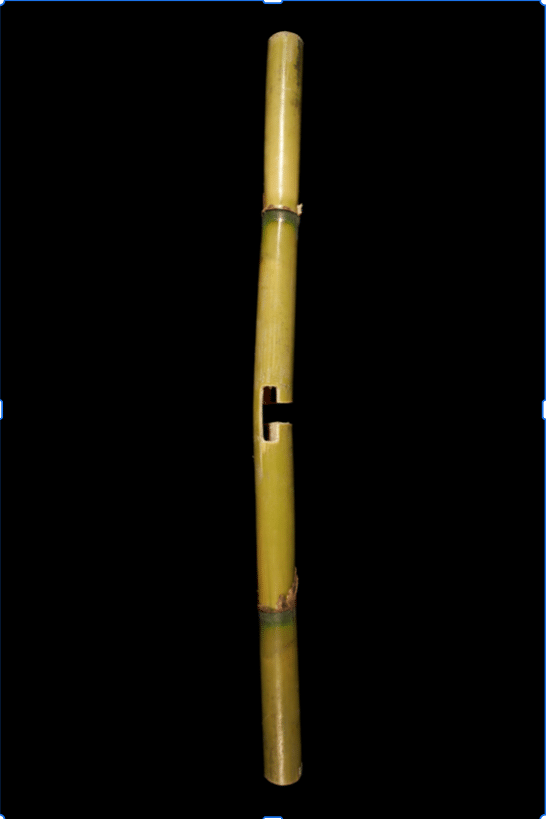
From here we began to form our early prototypes, cutting the material in order to bend it and then using custom joints to add the material together into a larger stronger mass.


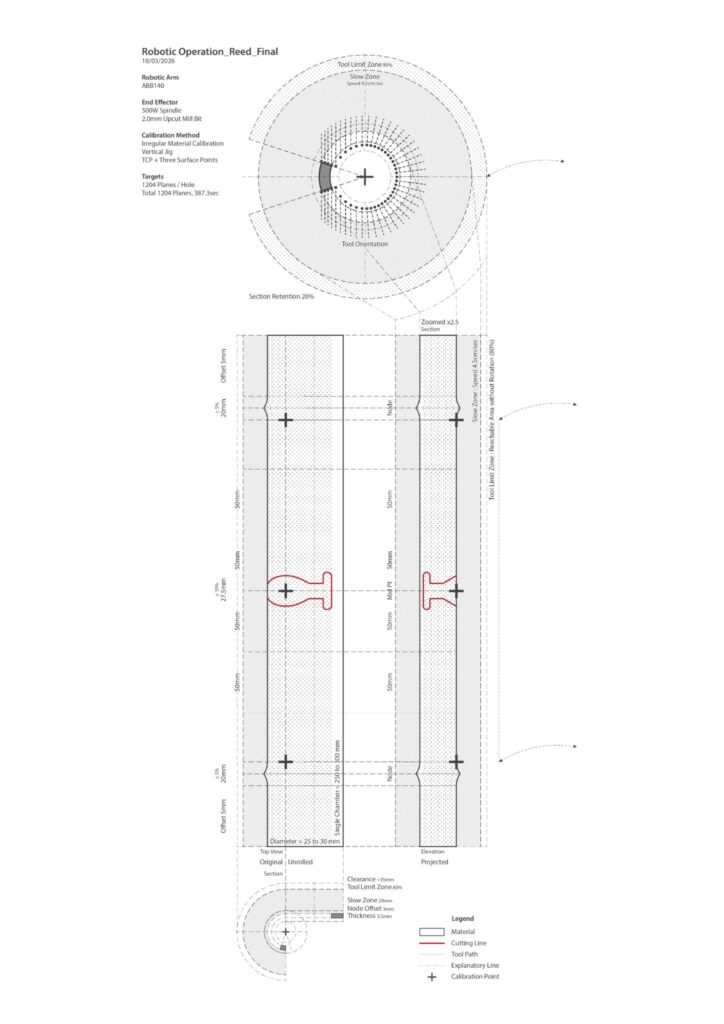
Robotic Jig Mk.1
Using the robot for its precision and control we began to explore how we could cut the reed using an ABB140 and a 2mm millbit. From earliest attempts trying to just calibrate the asymmetries of the material as a warped cylinder we managed our first cuts.
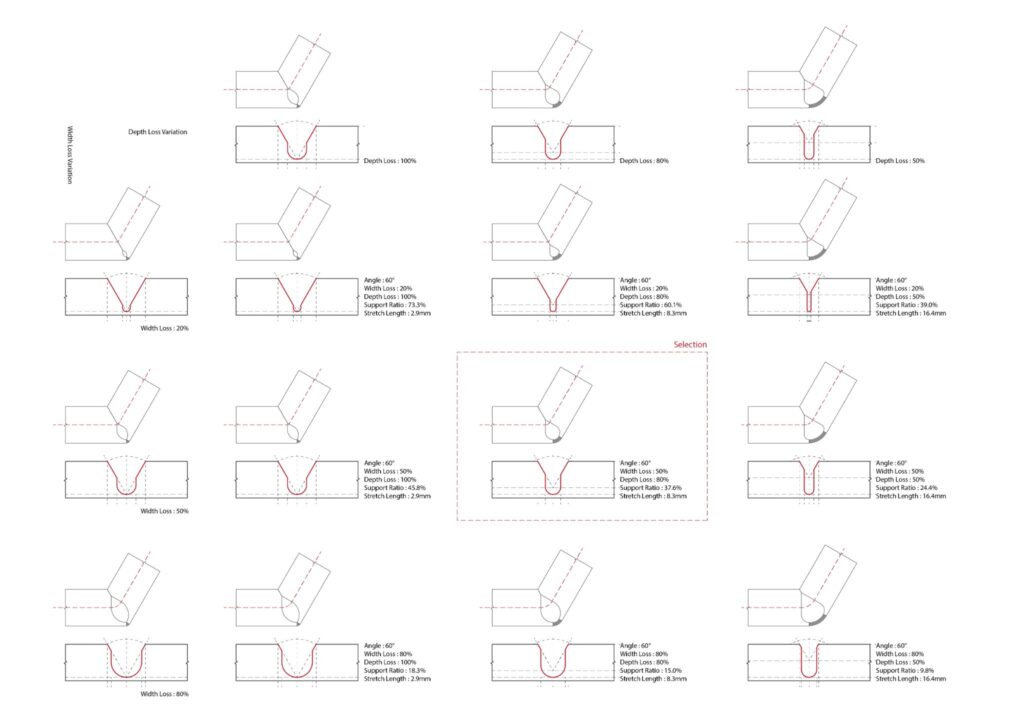
Cut iterations
With this early success we further chose to develop how different cuts of depth, angle and style would affect the bending ability of the reed and define its structural qualities.
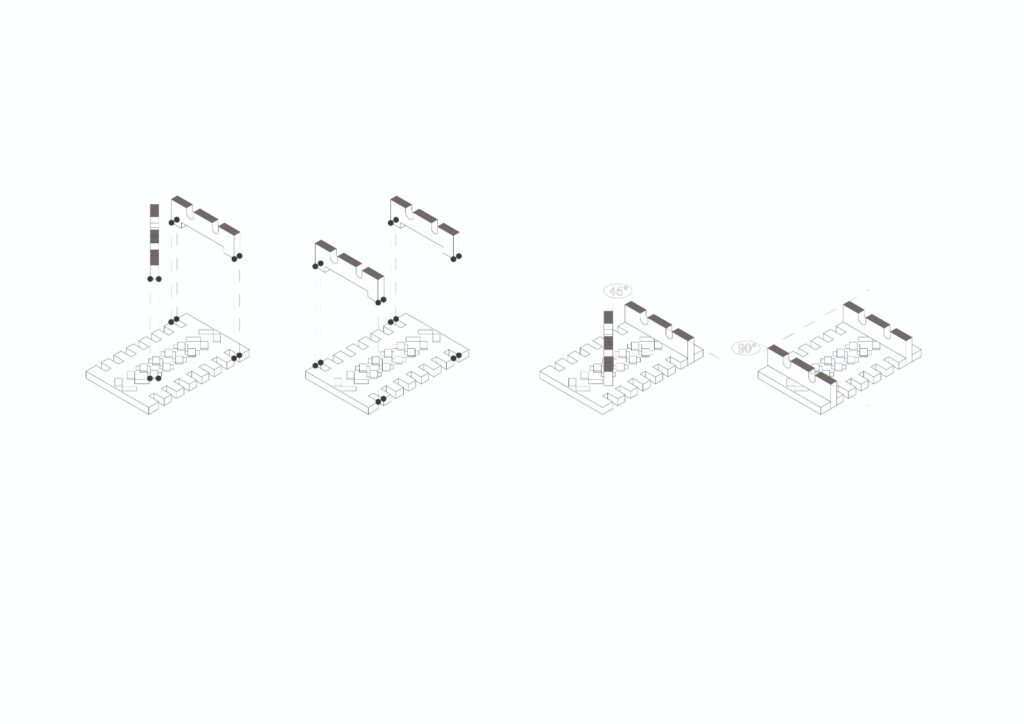
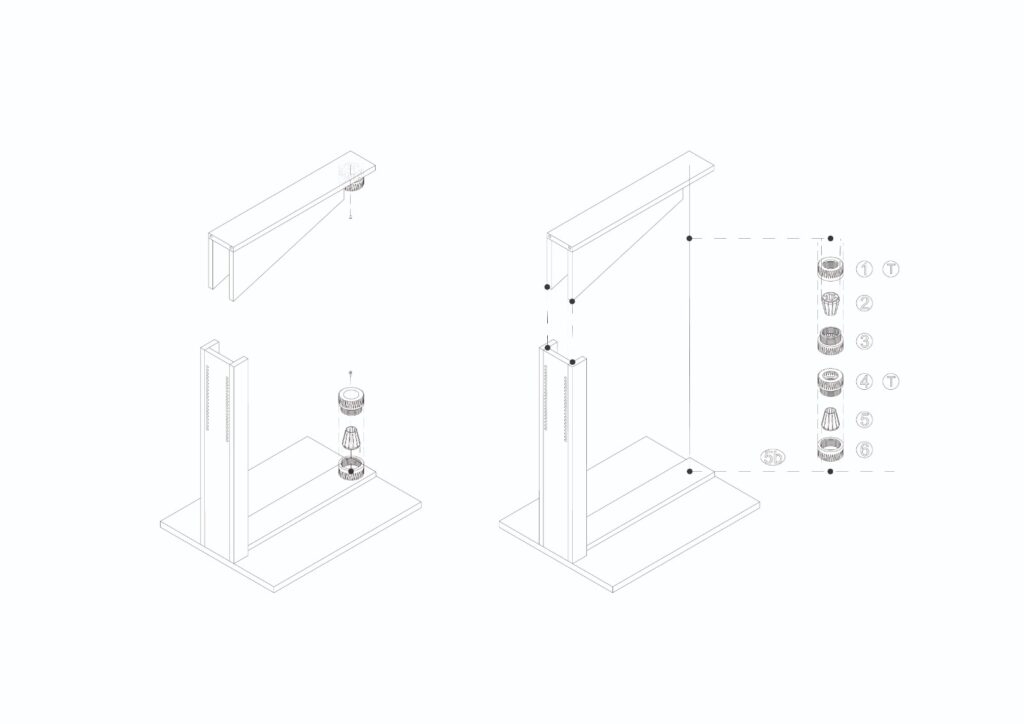
Robotic Jig Mk.2
One thing we realised from our first jig and cutting experiments was that in order to be able to reach as much surface area of the material of possible we would need to move to a vertical set up and develop a system which could adapt to a tight grip regardless of the reed piece’s diameter. We managed to achieve these improvements with our second jig iteration using an adaptable-heigh bridge and a 3D-printed collet fastening system.
Successful Robot outcome
Proposed Third-term continuation prototype