
Timber Syntax: A Computational Pipeline for Assembling Non-Homogeneous Timber
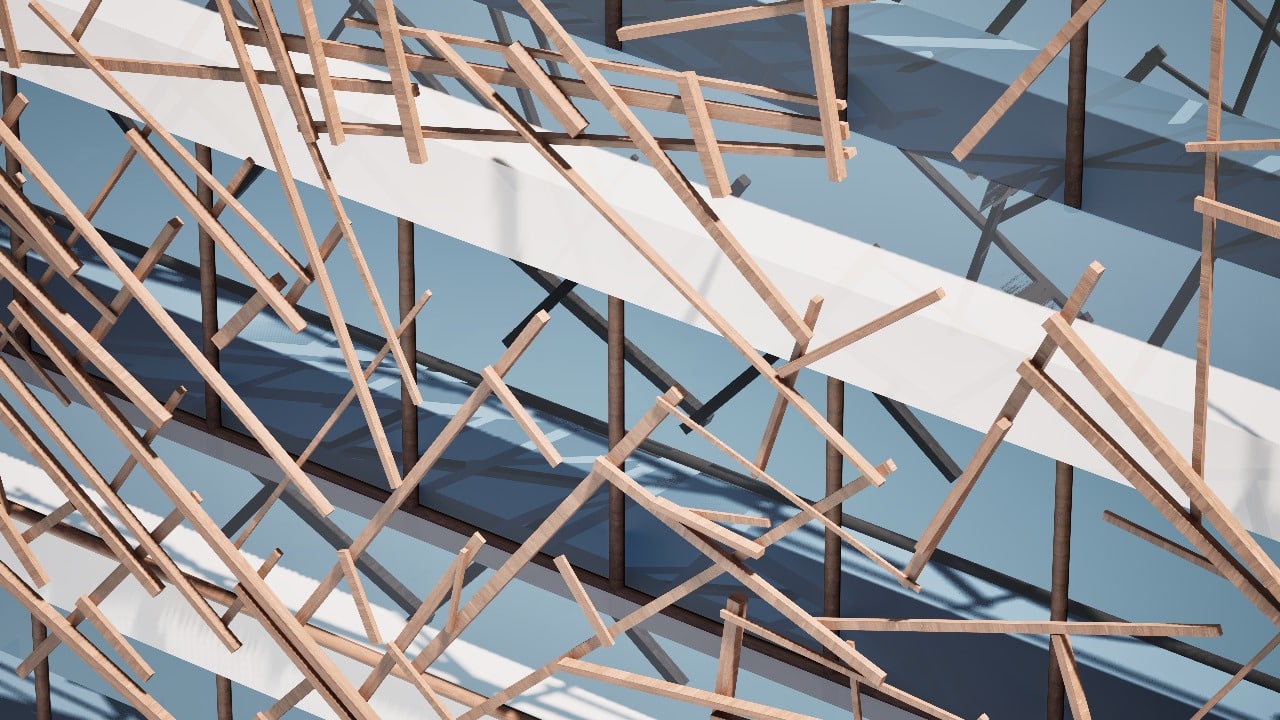
In the pursuit of a sustainable built environment, Timber Syntax demonstrates how reclaimed, non-homogeneous timber can be transformed into high-quality facade systems through a computational and robotic pipeline. Developed at the Institute for Advanced Architecture of Catalonia (IAAC), this project bridges waste reuse, advanced fabrication, and circular design to propose a new paradigm for timber … Read more
WOLF

“What if you could speak your design ideas and watch them transform into complete parametric scripts in real-time?”
AIA25 Studio – HaBiCoM
HaBiCoM is an AI-powered copilot designed to assist architects, designers, and users in shaping smarter, more responsive interior spaces. At its core, HaBiCoM redefines the way we approach furniture placement within residential environments by aligning each design decision with the user’s unique daily habits, lifestyle rhythms, and thermal comfort needs. Unlike traditional layout tools, HaBiCoM … Read more
Computing Risk and Planning Resilience from Afar
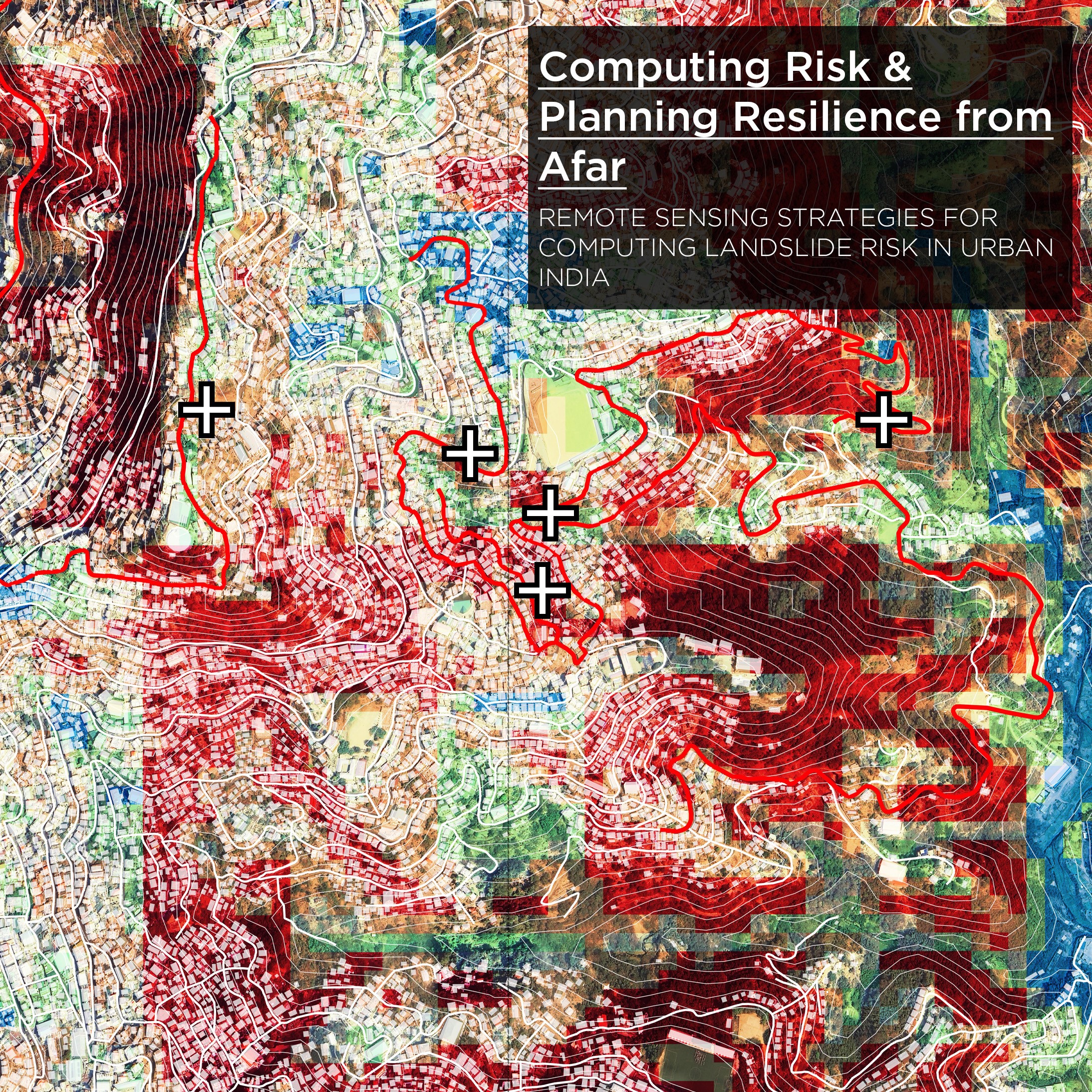
Computing Risk & Planning Resilience from Afar is a remote-sensing–driven investigative study to read, identify and address underlying vulnerabilities associated with landslide risk in urban India. The project aims to develop replicable analysis workflows for compounded risk calculation—making visible what often remains hidden enabling actionable insights in places where institutional data is frequently outdated or … Read more
Flow – SIGHT: De- coding urban mobility
Introduction Urban traffic congestion is more than just an inconvenience—it’s a global challenge tied to pollution, stress, and wasted time. While cities are turning to AI-driven systems to ease the gridlock, the question remains: Do these technologies actually perform better than traditional methods?Flow – SIGHT is a comparative research project that investigates traffic systems across … Read more
gAIa*

A sustainability CoPilot Gaia is an intelligent design assistant, a copilot that supports architects in navigating the early stages of design with real-time environmental feedback. Named after the ancient Greek personification of the Earth, Gaia reflects both the ecological focus of the tool and its role as a guiding presence in the creative process. The … Read more
Quito | in Transition
Quito is located in the north-central part of the Andean region of Ecuador, in south america. Given its high elevation, it is one of the highest capitals in the world. With a population of 1.9M people, it is the second-largest city of Ecuador. It is located in the province of Pichincha in the canton of … Read more
Woman & Water in Rundu: a mobility justice framework
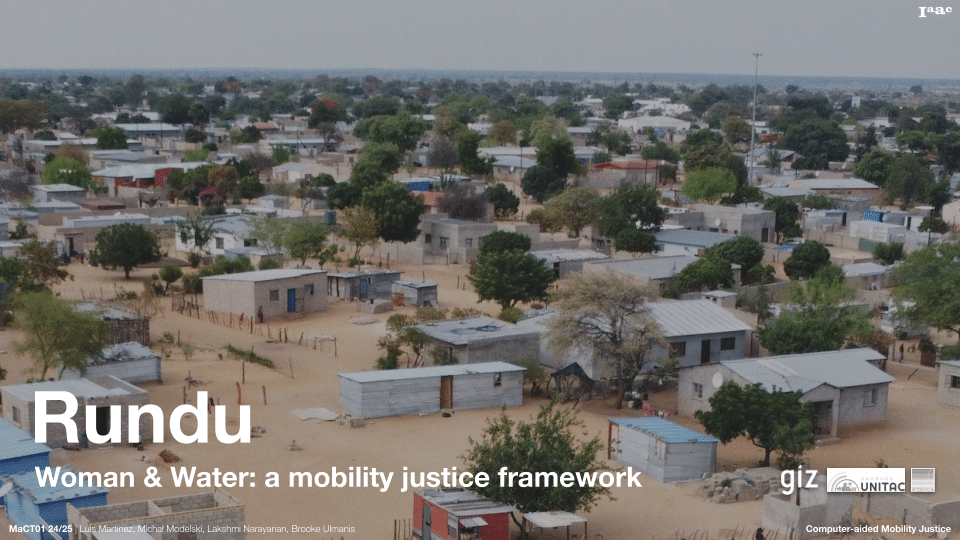
Ndama, the fastest-growing informal settlement in Rundu, Namibia, faces critical challenges in water accessibility shaped by gender, age, income, and spatial isolation. With women disproportionately responsible for water collection under unsafe and inequitable conditions, our study combines interviews and spatial data to map intersectional vulnerabilities. We developed an interactive tool that simulates real-world constraints—heat, crime, … Read more
Design Development: Image to image generator
Project Objective The project objective is to develop an interface where users can batch upload images of an established design, usually in the Design Development phase when materials and small tweaks are being considered. The goal is for a user in a traditional architecture office to batch upload images of their 3d model to quickly … Read more
Mas Profundo: Model to Building
Mas Profundo is a pipeline that allows designers to generate interesting architectural images from simple models using a live camera feed. Architectural models tend to portray a reduced colorway and detail is limited by workmanship and time. Mas Profundo allows each model ideation to be visualized more realistically than a simple foam model. Mas Profundo … Read more
AIbotix: Optimizing Construction Workflows Through Spatial Cognition and an AI Agent in Robotics
“Spatial Cognition in Robotics: Optimizing Construction Workflow with AI”Shu Xiao – MRAC02 Thesis, IAAC 2024–2025 Despite advances in manufacturing automation, the construction industry continues to rely heavily on manual labor due to its unpredictable environment, safety concerns, and fragmented workflows. This project explores how vision-guided robotics and real-time AI agents can close that gap by … Read more
Graph Thinking for Adaptive Living
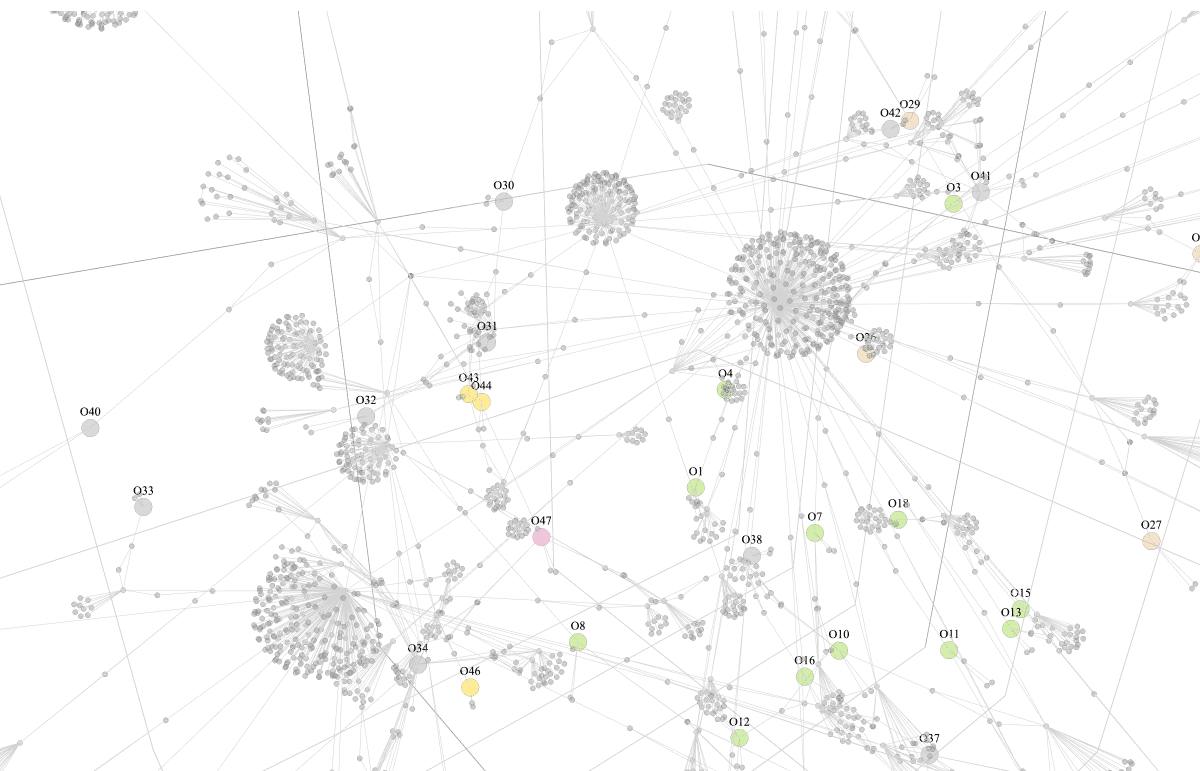
Our Solution: The Co-creator App We’ve developed a Copilot App – a local AI system that lives in your building and speaks your language. Literally. You make natural language requests, and it translates them into real architectural actions by understanding the complex relationships between spaces and residents through graph databases and GDS algorithms. Here’s how … Read more
FGSketch: image to sketch web-app

Introduction We are Aleyna and Francesco, and in this post, we present FG Sketches—a generative tool developed as part of the Artificial Intelligence in Architecture (AIA) module within the MaCAD Generative AI program. The objective of this project was to design a system capable of learning from the sketching language of Frank Gehry and translating … Read more
