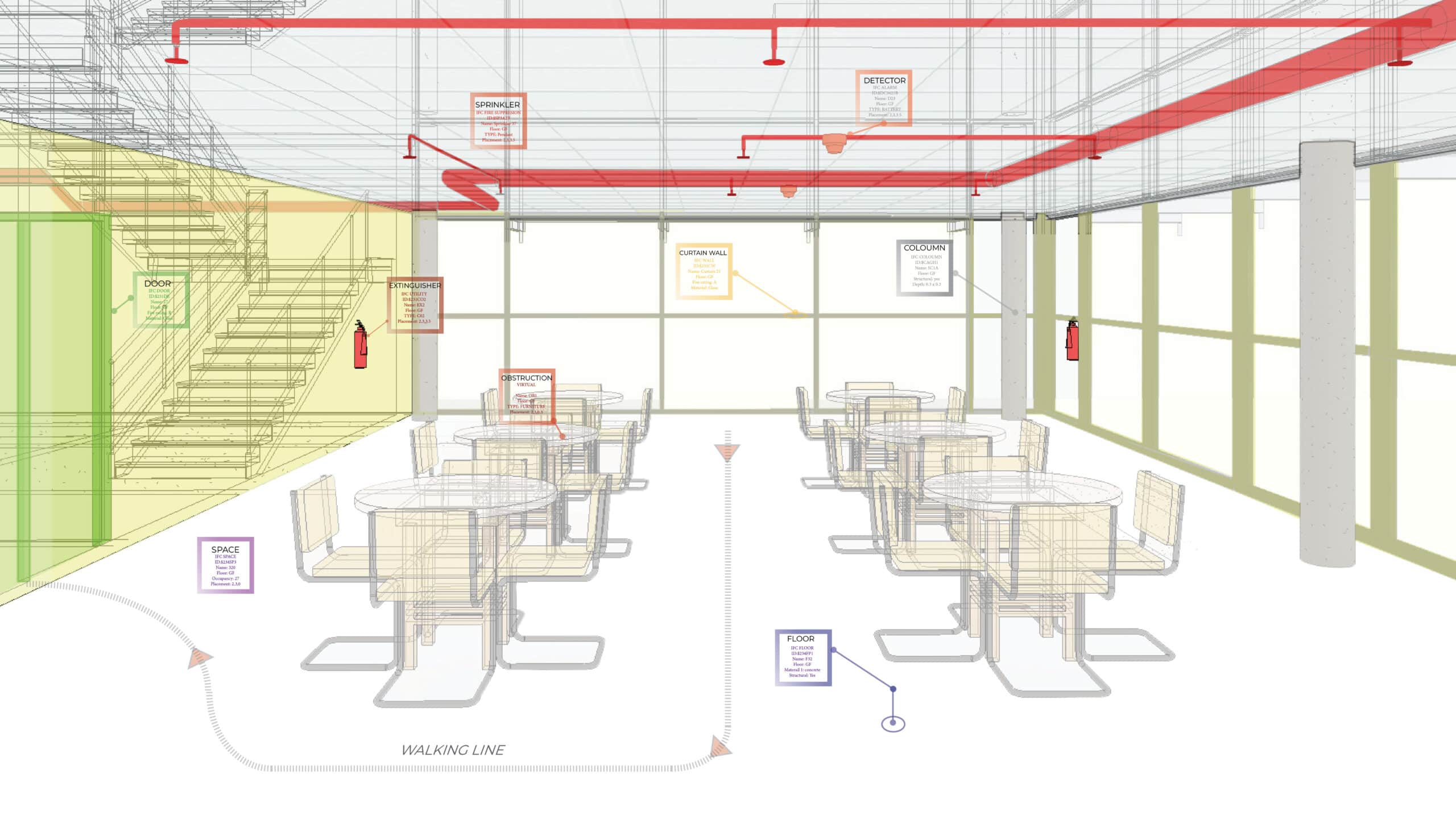
SEMIOCITY
Semiocity — Semiotic-Aware Urban Image Generation This is part of the Academic work at Iaac Barcelona for the Master’s Program im Advance Computation for Architecture and Design 2024-2025 Repository for the Master Thesis “Semiocity: Generating Semiotic‑Enriched 3D Models from Text Inputs” Degree: Master in Advanced Computation for Architecture and Design (MaCAD), Institute for Advanced Architecture of … Read more
A.I. Morphogenesis
Toward Net-Positive Architecture MASTER IN ADVANCED COMPUTATION FOR ARCHITECTURE & DESIGN 2024/2025 Anji, Christina & Will Thesis – Supervisor: Gabriella Rossi We are facing an urgent climate crisis, one that demands architecture to move beyond conventional sustainability toward regenerative, net-positive approaches. Current design practices often struggle to integrate environmental and context-aware analysis seamlessly because they … Read more
ThinkSpaceAI
Turning Natural Language into Architecture Designing a house is never just about walls and windows—it’s about translating human stories into spaces that feel alive. Clients describe routines, aspirations, and cultural practices. Architects then face the challenge of turning those narratives into coherent layouts that also respond to site, climate, and context. Most computational tools fall … Read more
Andromeda
Andromeda is a Rhino-native copilot that turns briefs, context, and massing into a single, interpretable graph so designers can enrich masterplans, evaluate KPIs, and bake results back to Rhino, without leaving their workflow. Built for early-stage masterplanning, it aims to raise social value, connectivity, accessibility, and overall urban quality by unifying data, guiding program allocation, … Read more
Urban Climate on Graphs: From Form to Comfort
ABSTRACT This thesis investigates the relationship between urban development patterns and outdoor thermal comfort, with a focus on Mean Radiant Temperature (MRT), a key factor in calculating the Universal Thermal Climate Index (UTCI). While graph-based approaches have long been used in spatial analysis (e.g., space syntax, circulation networks), this research extends the application of graph … Read more
From Pixels to Parameters: transforming AI image to editable facade geometry
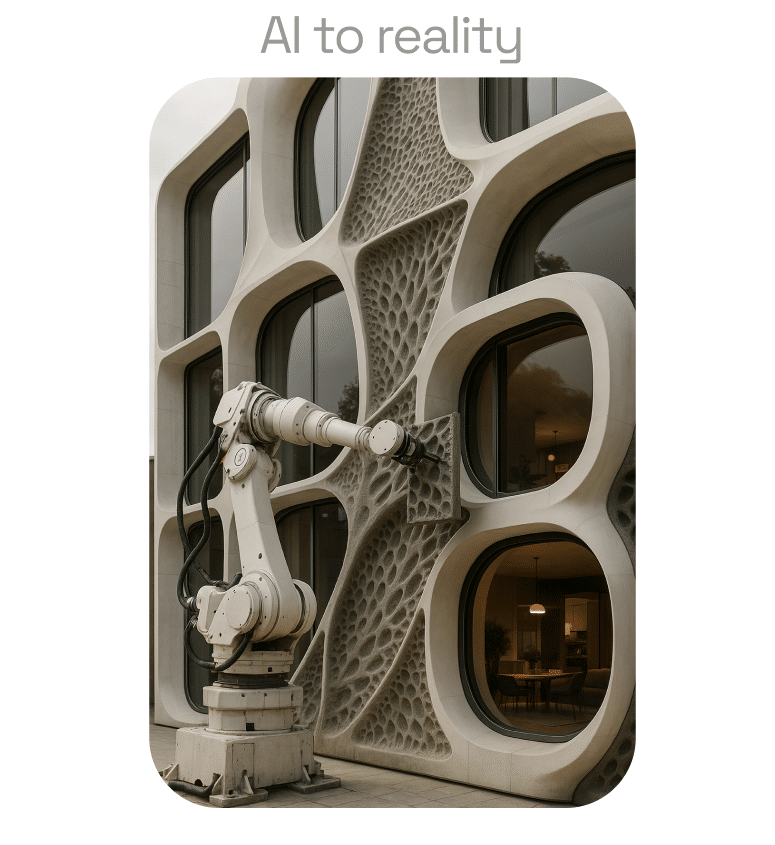
ABSTRACT Recent developments in generative artificial intelligence, particularly diffusion models such as Stable Diffusion and DALL·E, have enabled the creation of visually compelling architectural façades from text-based prompts. While these outputs are expressive and stylistically diverse, they remain fundamentally unstructured, lacking spatial intelligence, semantic clarity, and geometric editability. This limits their integration into architectural design … Read more
InFormed
Manual floorplan generation for high-rise residential buildings is labor-intensive and often overlooks key environmental parameters, limiting the ability to quickly assess performance-based design alternatives. Demo :
CINEFLOW : An AI-Powered Cinematic Walkthrough for Architectural Design

Automating Architectural Visualization: A Journey Through Technical Pivots and AI Evolution Introduction In the rapidly evolving landscape of architectural visualization, the gap between conceptual design and compelling visual presentation remains a significant challenge. While architects and designers excel at creating innovative spaces, transforming these 3D models into cinematic walkthroughs typically requires specialized skills, expensive software, … Read more
Interactive Block-Based Structural Generation and Analysis Tool
In contemporary architectural practice, the gap between conceptual design and structural analysis often leads to delays, miscommunication, and inefficient iteration cycles. This project proposes an integrated workflow that bridges this divide by creating an interactive interface where architects can receive real-time structural feedback while scanning their preliminary physical model. By combining Unity-based visualization, QR code-enabled … Read more
EcoNodes
EcoNodes is an AI-driven urban planning platform designed to identify and prioritize the city’s most heat-stressed and impervious junctions for strategic green interventions. By combining satellite imagery, street view segmentation, and environmental datasets, EcoNodes highlights the urban nodes that lack vegetation, suffer from poor air flow, or trap excessive heat. The tool empowers planners to … Read more
Spatial Data to Economic Intelligence
Using Street View and Remote Sensing methods to infer ground level socio-economic realities The Challenge: The Urban Data Blind Spot Urban economies are dynamic, fast-evolving systems—but the data used to understand them is often static, delayed, or incomplete. In many cities, a significant share of economic activity unfolds beyond the reach of traditional measurement frameworks, … Read more