Machine Thinking
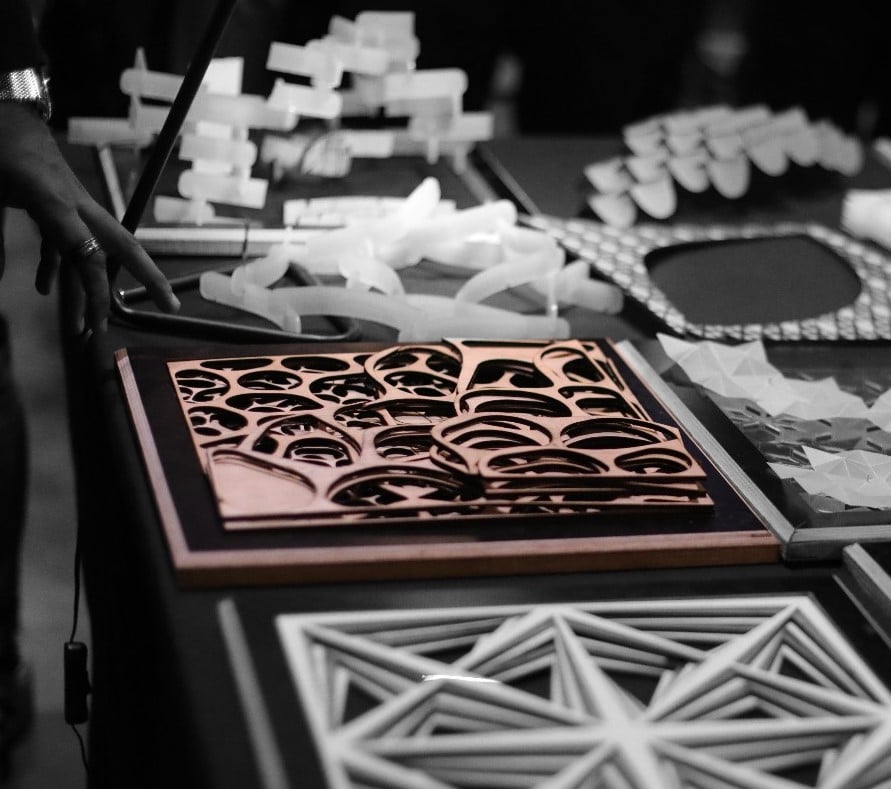
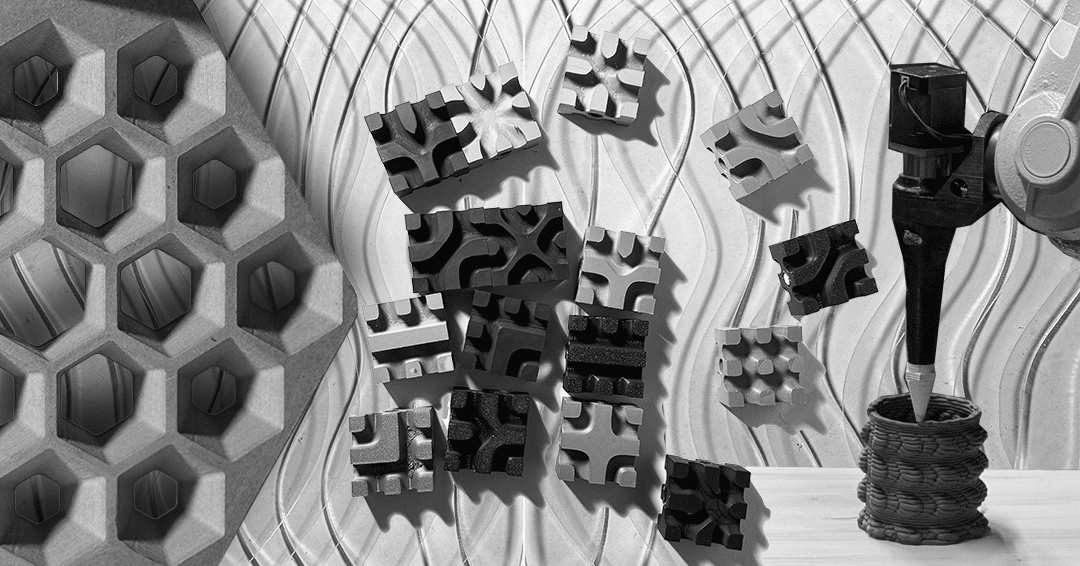
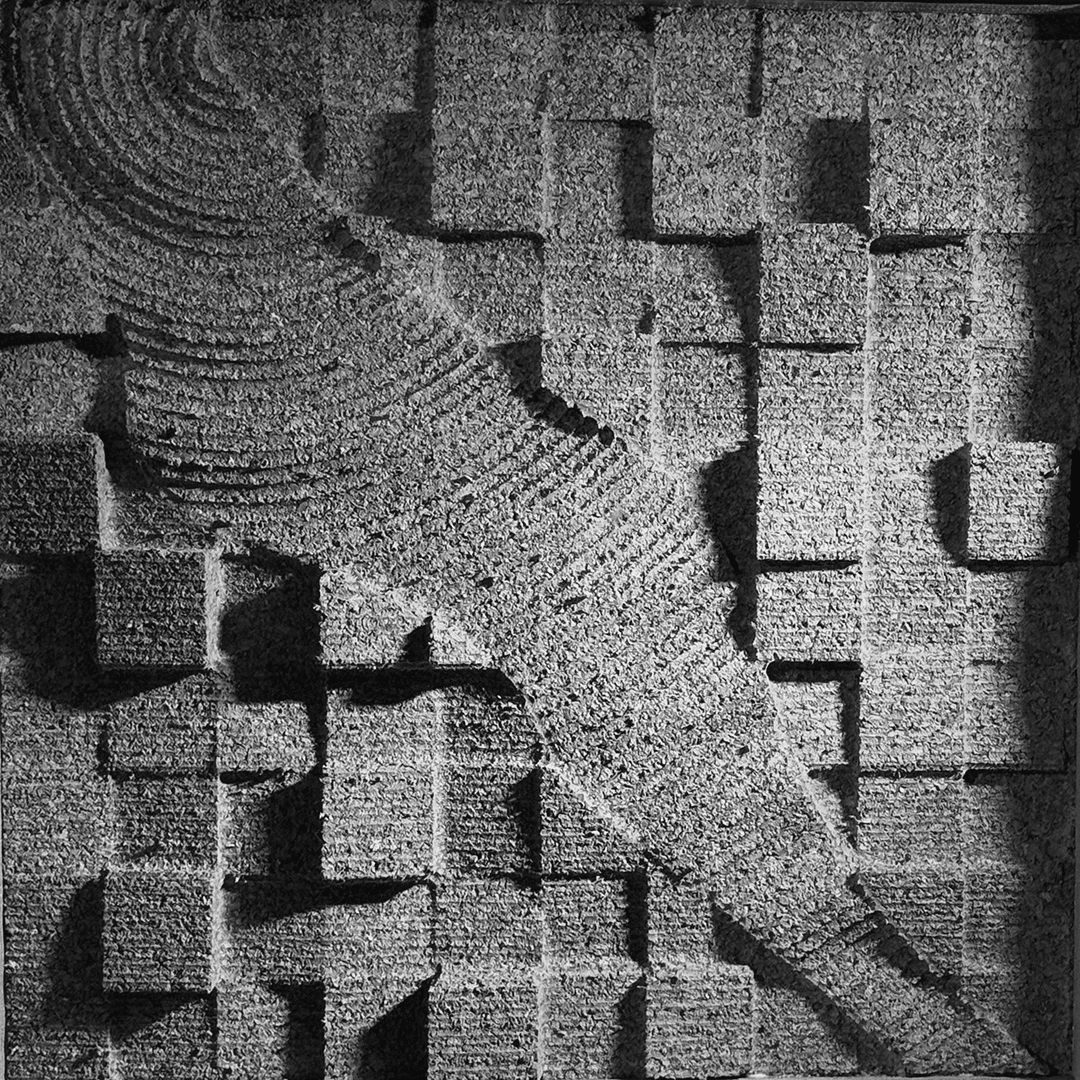
Introduction to Digital Fabrication Team : Sejin Park & Hasan Hirji CNC Milling During the CNC Milling process, RhinoCAM software automatically creates bridges; a necessary milling process outside of commands that one might use to manipulate material. We began with the idea of testing the frequency and depth of 2-axis bridging path movement presets to … Read more