ONODRIM

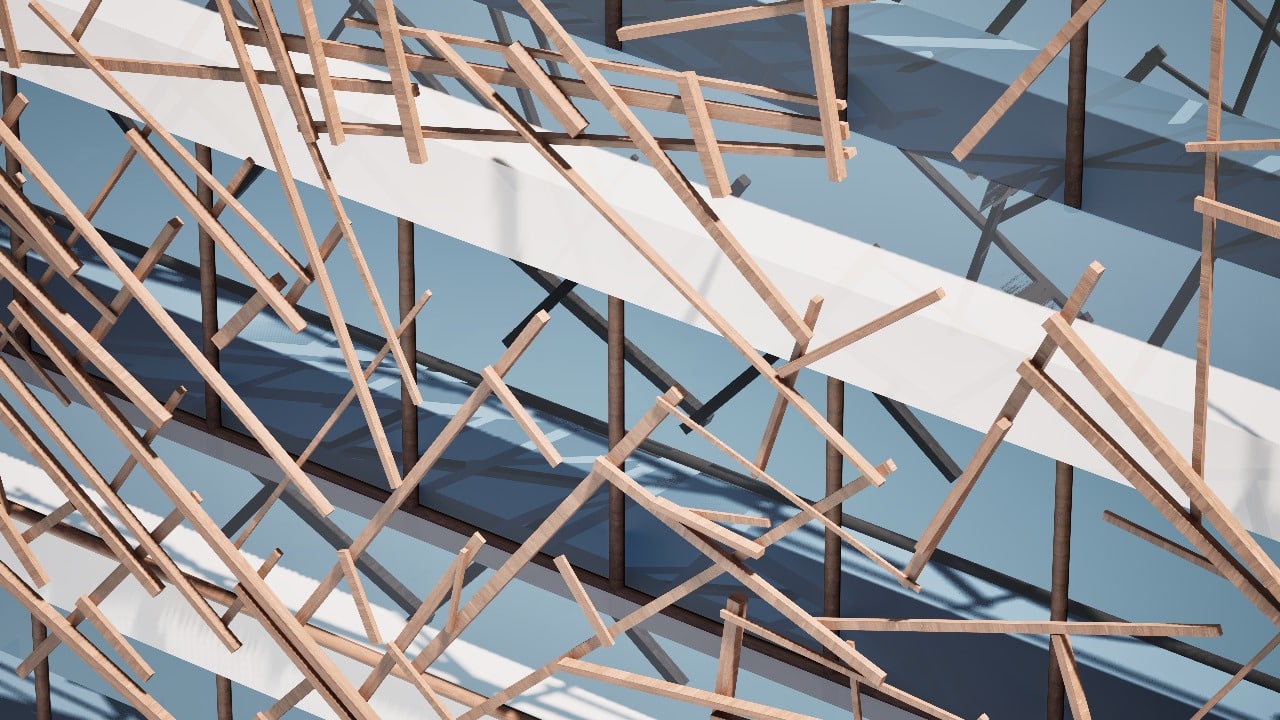
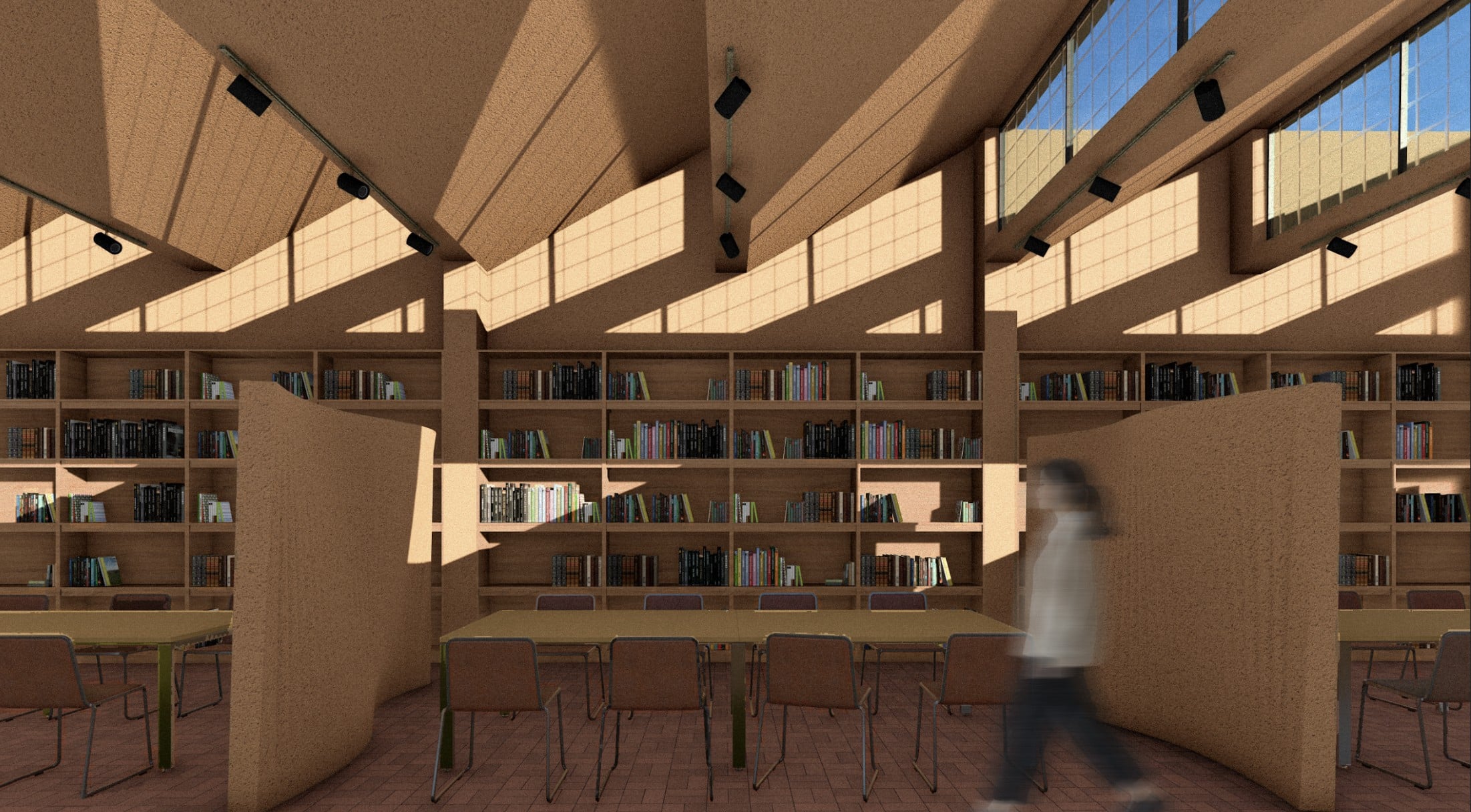
Robotic Fabrication of Small-Diameter Whole Timber for Construction Systems in a Plantation Forestry Context

Robotic Fabrication of Small-Diameter Whole Timber for Construction Systems in a Plantation Forestry Context
A headset-based AR platform that guides a human assembler through complex joinery step by step, projecting ghost geometry directly onto the physical parts in 3D space. The system closes the feedback loop in real time, reading part placement through the device’s own cameras and advancing the assembly sequence automatically when each joint is correctly seated. … Read more

Studio: Term 2 – MRAC + MAA For our third term MRAC paired up with MAA students to investigate how vernacular materials and techniques of Catalonia could be modernised with robotic precision to create new typologies. Our group chose to work with Canya; more specifically Arundo Donax, Giant Reed. Two vernacular techniques we looked to … Read more
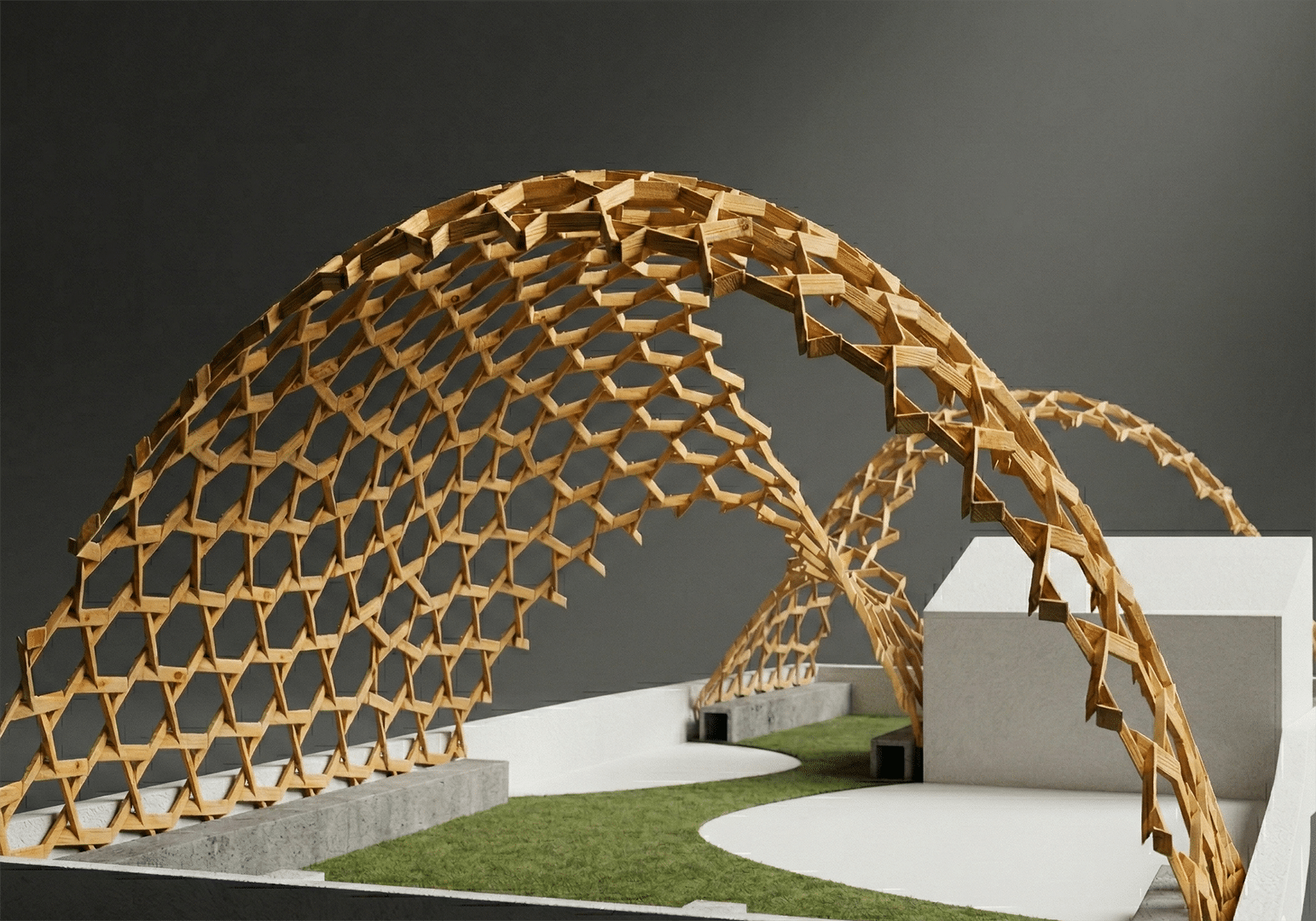
Designed for the IAAC rooftop, this pavilion merges computational design with advanced robotic fabrication. The geometry originates in Grasshopper, where a basic mesh is transformed into an optimized vault using Kangaroo’s physics-based dynamic relaxation. A reciprocal frame pattern is then applied, translating the continuous shell into short, mutually supporting timber pieces. Because every interlocking element … Read more

Digital fabrication enables designers to explore geometries that go beyond traditional construction constraints. The exercise focuses on translating complex geometries into constructible systems that integrate material behaviour, joinery logic, and mass customisation. Each technique allows experimentation with unique fabrication constraints, informing the evolution of the vertical element design. The outputs serve as material and geometric … Read more
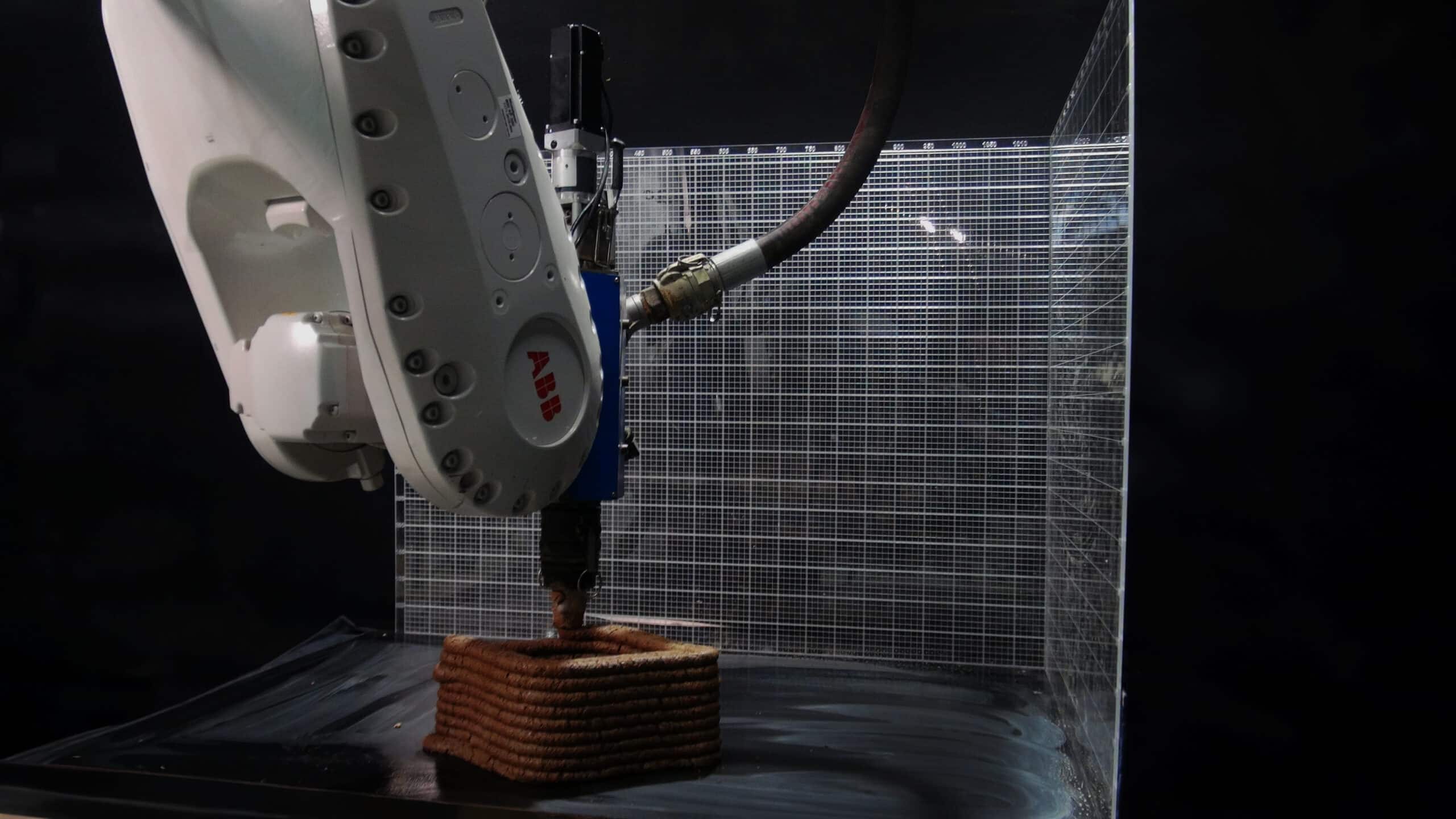
This research focuses on one of the main limitations of 3D printing with earth: low stability in the wet state. Today, the maximum daily printing height is around 20 cm, which limits construction efficiency. This project explores how to improve wet-state stability to enable taller, faster, and more consistent earthen walls. STATE OF THE ART … Read more

The massage chair is an experiment in digital fabrication and hybrid workflows, using computational design, CNC milling, 6-axis robotic milling, and human assembly and finishing, to understand how different subtractive manufacturing processes can be combined to balance speed, precision, and material expression in digital fabrication. Materials Tools Used Early Designs Early explorations of designs in … Read more

Abstract: The Elephant Chair project was developed during the workshop “Robotic Milling and Design for Subtractive Manufacturing Workflows.”This workshop explored hybrid fabrication methods combining 3-axis CNC milling and 6-axis robotic milling to translate digital geometries into precise wooden prototypes. Our team designed and fabricated a furniture piece inspired by organic anatomy, robust yet flexible, mirroring the mechanical elegance of the machines used … Read more
Lessons from Workshop 1.1 – Robotic milling and design for subtractive manufacturing This workshop focused on advanced subtractive manufacturing techniques, exploring the integration of 2-axis CNC milling and 6-axis robotic milling within a hybrid digital fabrication workflow. The process emphasized computational design-to-production strategies, including toolpath generation, material optimization, and robotic calibration. Through sequential stages of … Read more
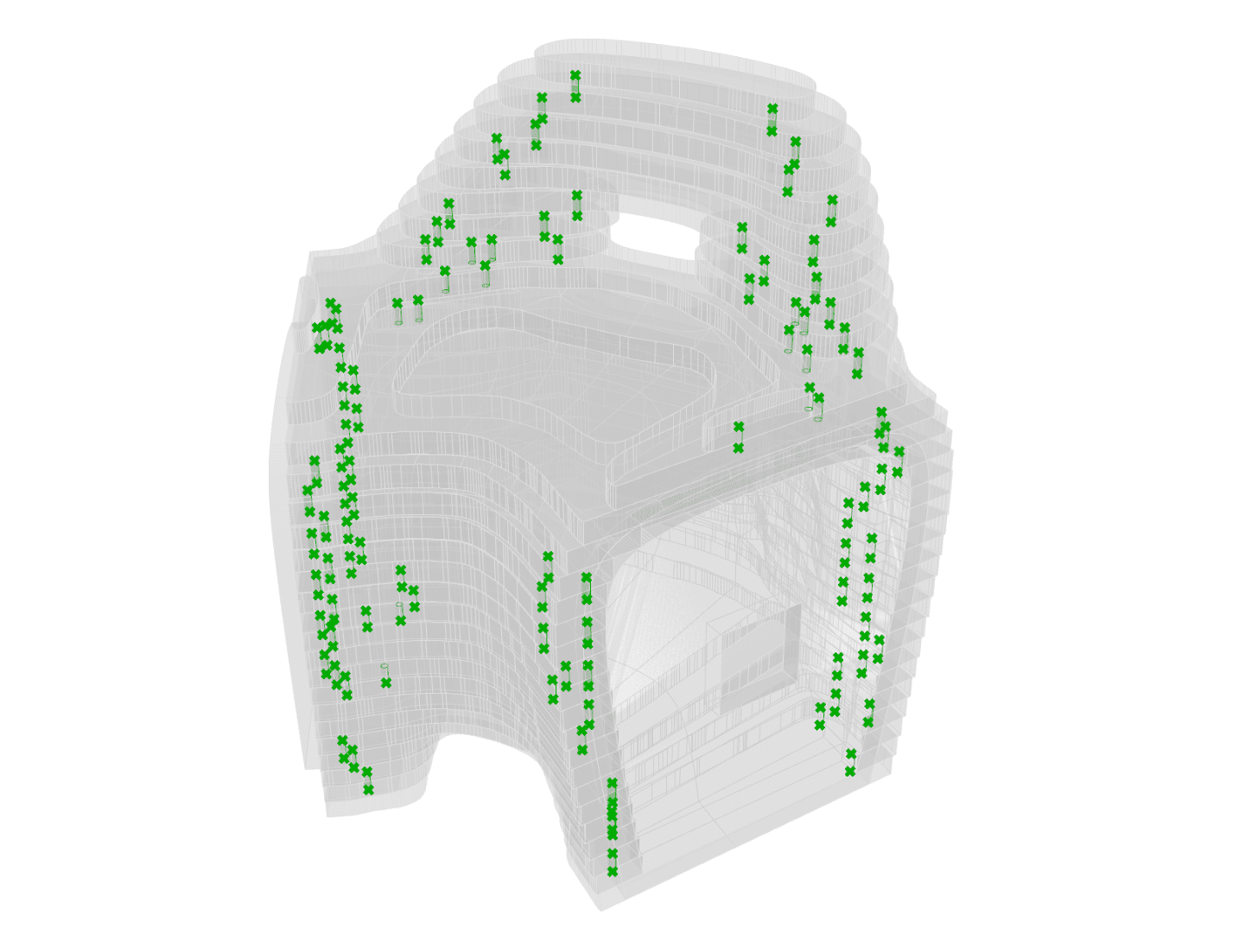
In contemporary architectural practice, the gap between conceptual design and structural analysis often leads to delays, miscommunication, and inefficient iteration cycles. This project proposes an integrated workflow that bridges this divide by creating an interactive interface where architects can receive real-time structural feedback while scanning their preliminary physical model. By combining Unity-based visualization, QR code-enabled … Read more
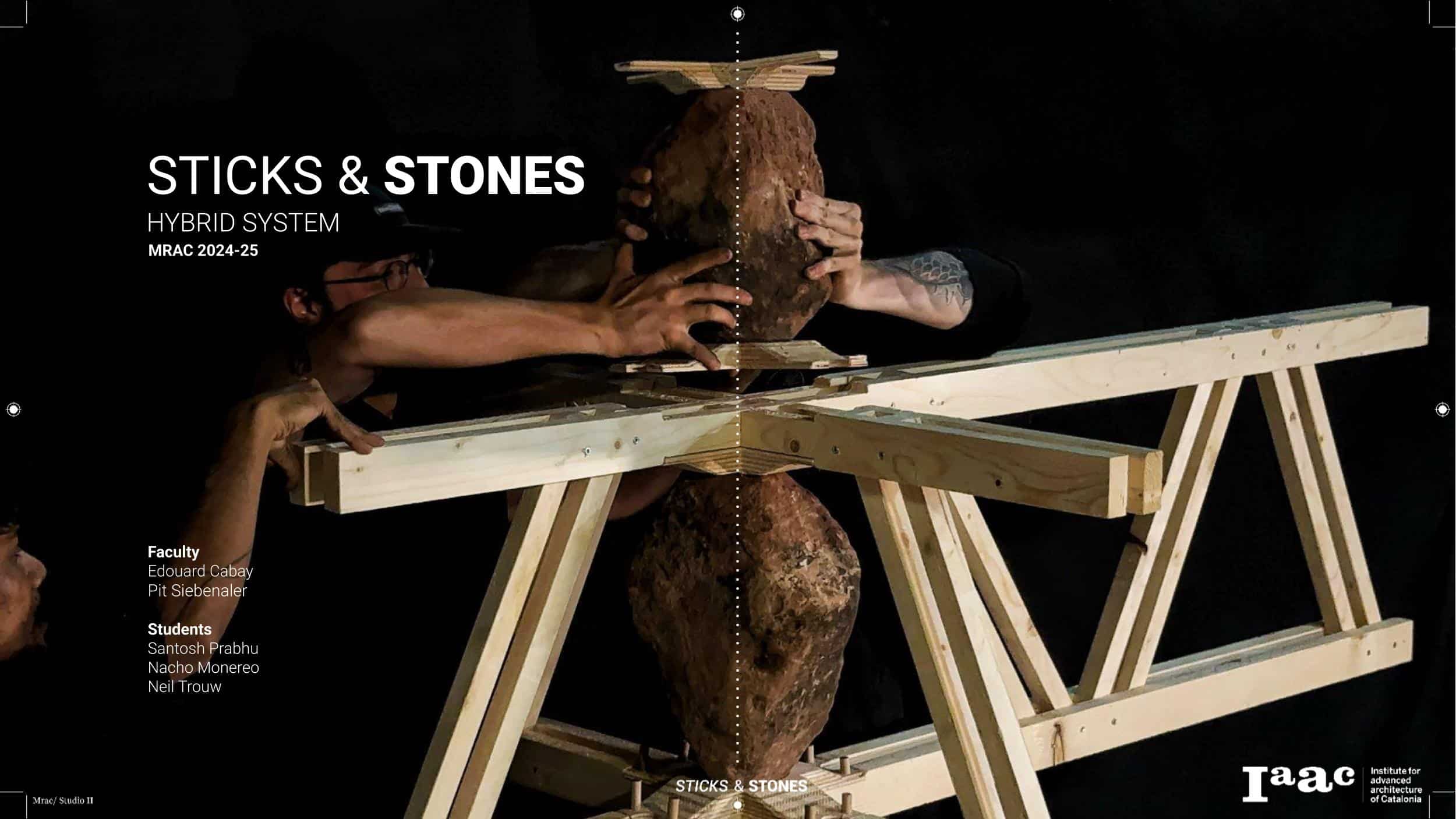
Hybrid Timber and Stone Constrcuction System Utilisng 6-axis Robotic Fabriction Our research begins with a critique of how we build today. Technological advancements have enabled rapid, standardized, and seemingly affordable construction. But these efficiencies hide deeper costs. In reality, we’re paying through the loss of cultural specificity, environmental integrity, and material identity. What emerges is … Read more
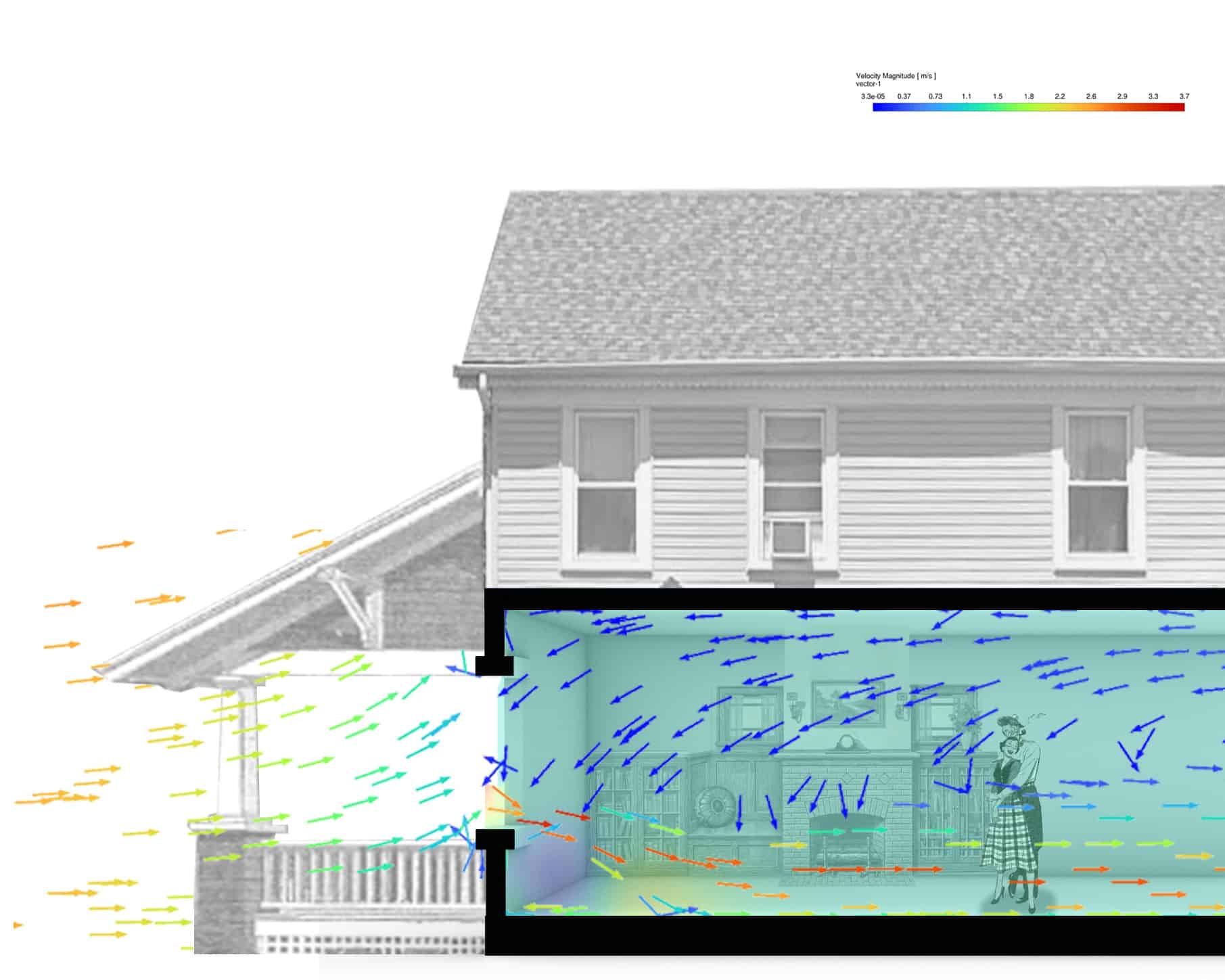
Computational Fluid Dynamics for Natural Ventilated Systems primarily located within the United States The Problem within Context: Sears Catalogue from 1930s to 1950s United States. The American Dream is a phrase that has taken meaning in the ownership of a home with a white picket fence. The phrase was popularized in the 1930s after WWI … Read more
ABSTRACT Autonomous parametric furniture assembly using modular blocks and ROS-driven industrial robots promises to revolutionize on-demand manufacturing. In this work, we introduce DRDA (Dynamic Robotic Design Activities), a unified framework that seamlessly links customer-driven design to autonomous multi-robot execution. A user-defined geometry and style, which our custom block-selection and toolpath-generation engine converts into collision-free pick-and-place … Read more
In the pursuit of a sustainable built environment, Timber Syntax demonstrates how reclaimed, non-homogeneous timber can be transformed into high-quality facade systems through a computational and robotic pipeline. Developed at the Institute for Advanced Architecture of Catalonia (IAAC), this project bridges waste reuse, advanced fabrication, and circular design to propose a new paradigm for timber … Read more
Vernacular architecture has steadily lost relevance in contemporary practice. Industrialized construction methods, aesthetic shifts, and the pursuit of perceived reliability in materials like concrete and steel have overshadowed traditional techniques. However, these modern materials often come at a high environmental cost. Among the overlooked methods is quincha, a construction technique common in Latin America. It … Read more

Why – Problem context In the current forestry industry, only 40% of each harvested tree is actually used for construction or valuable products. The remaining 60% often ends up as waste — discarded, chipped, or burned as firewood. This imbalance sparked a fundamental question:Can we change this ratio? Driven by that inquiry, we began exploring … Read more
