
AIM
The goal is to teleoperate both the Husky robot and the UR10e arm, enabling them to avoid obstacles on the floor and push those that are unavoidable.
To achieve this, we designed a system that allows the user to control both robots using any available camera, incorporating hand tracking for intuitive command execution.
SYSTEM ARCHITECTURE
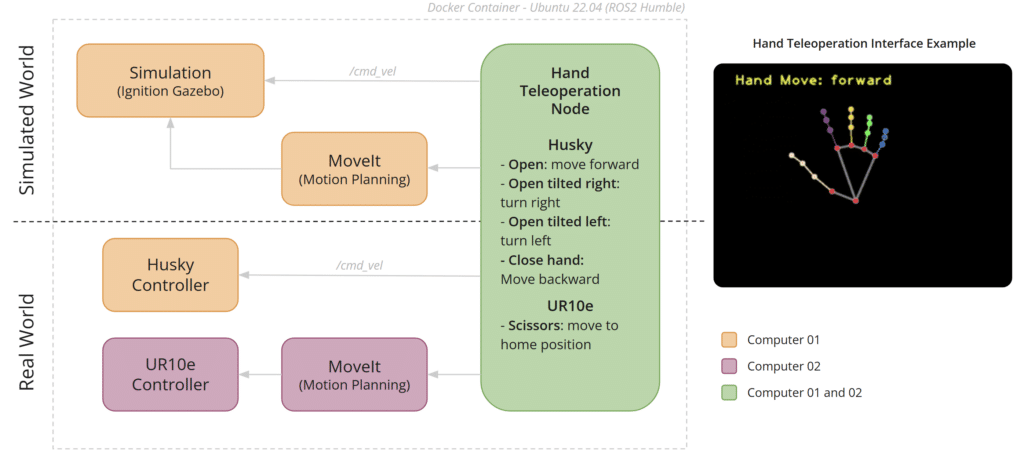
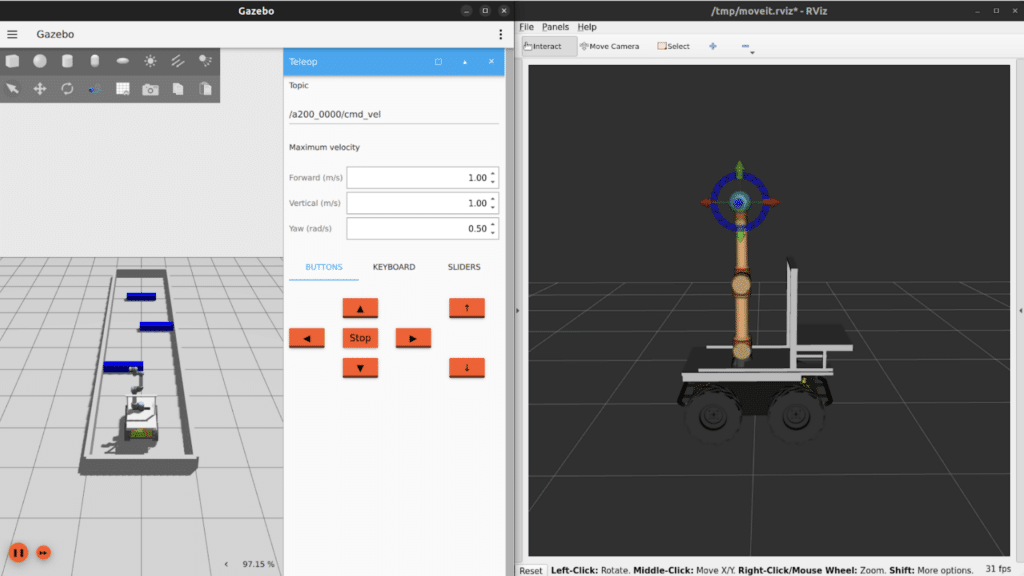
TESTIN IN SIMULATION
TESTING IN REAL WORLD
FUTURE STEPS
- Enhanced Control: Expand Husky’s command set, and focus on UR10e hand imitation rather than predefined movements to increase versatility.
- Autonomous Navigation & Perception: Integrate LiDAR and cameras for Husky to enable basic obstacle avoidance and for UR10e to enhance object detection.
- User Interface Development: Design a basic interface that allows switching between manual and autonomous modes while displaying camera feeds and key robot feedback.
