
Over the past four weeks, we developed a project focused on designing and fabricating a custom-made end effector for a robotic arm, with the aim of producing a painting on a canvas using black acrylic paint. Unlike the first assignment, where the drawing tool was predefined, this time we were required to build our own device and program both its activation system and the robot’s trajectories.
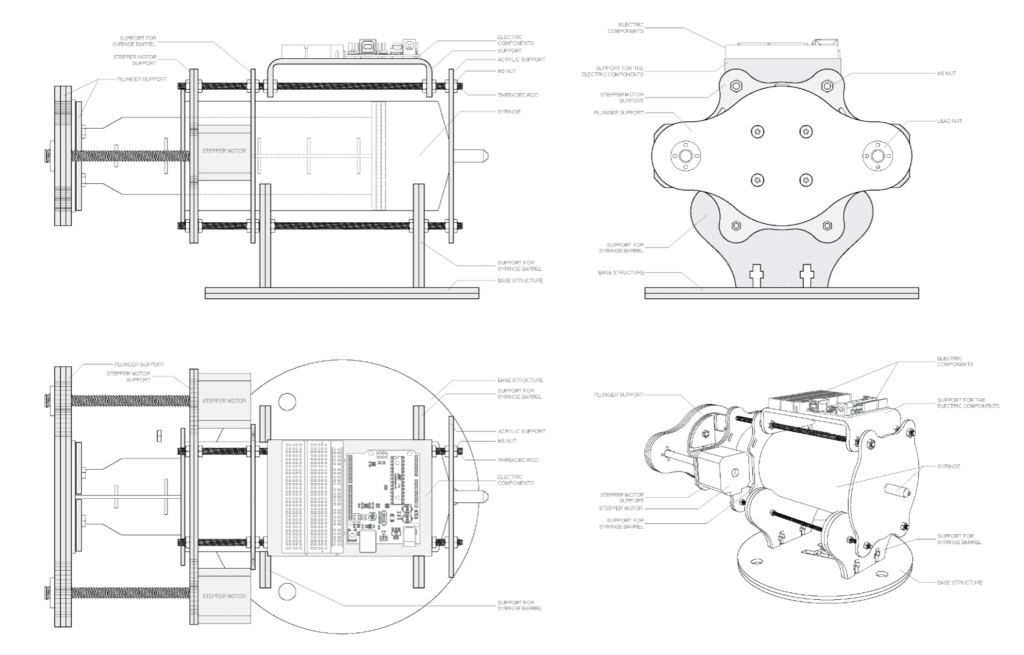
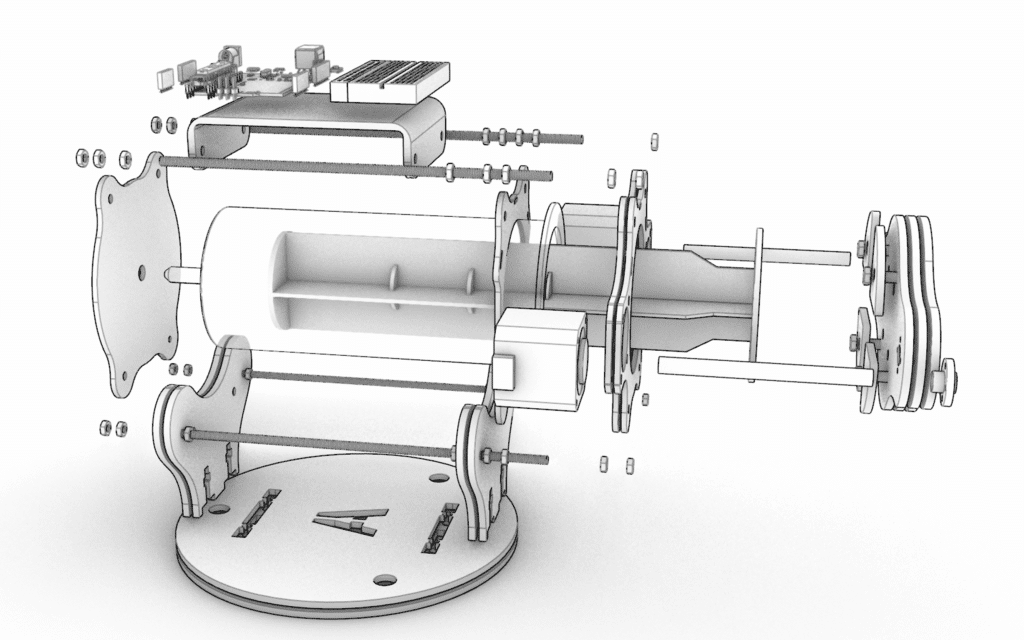
In our group, we designed an end effector based on a one-liter syringe that served as a spilling mechanism to release paint onto the canvas. The structure was made from 4 mm laser-cut acrylic, which allowed us to precisely integrate the syringe and mechanical components. To activate the plunger, we incorporated two motors controlled through an Arduino board.

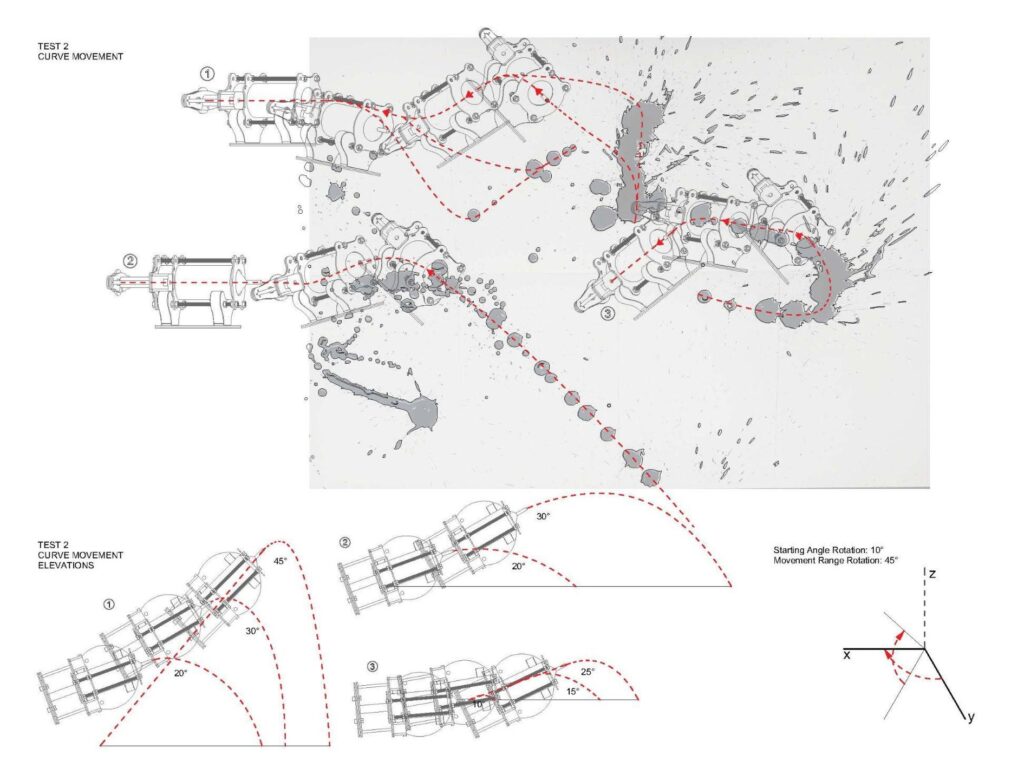
Before programming the robot, we conducted a manual exploration of the spill behaviour. We tested ranges of motion along the X, Y, and Z axes to understand the maximum and minimum limits the robotic arm could reach and to define a suitable movement strategy.
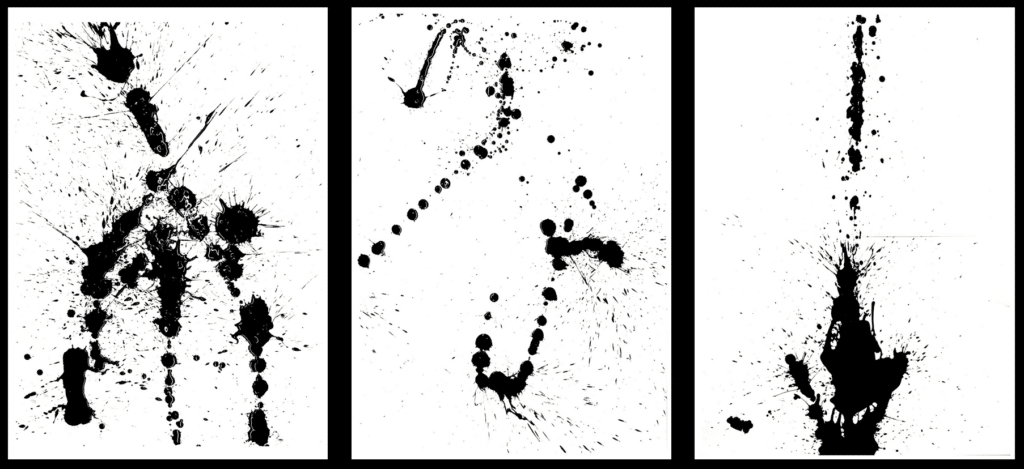
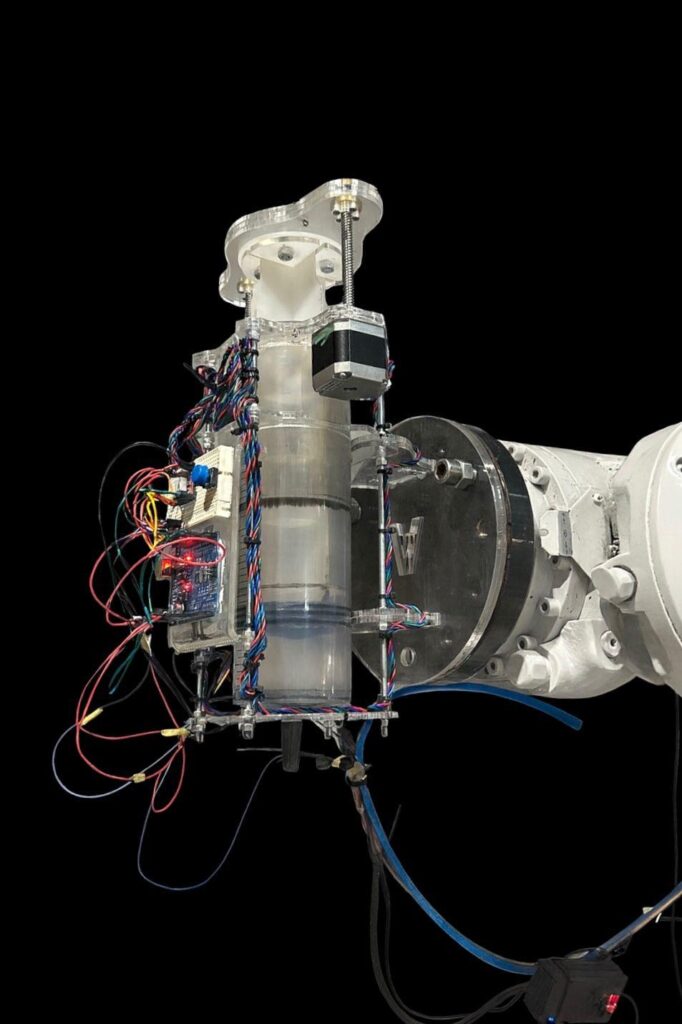
Image 3: first iteration testing the syringe and motor operation.
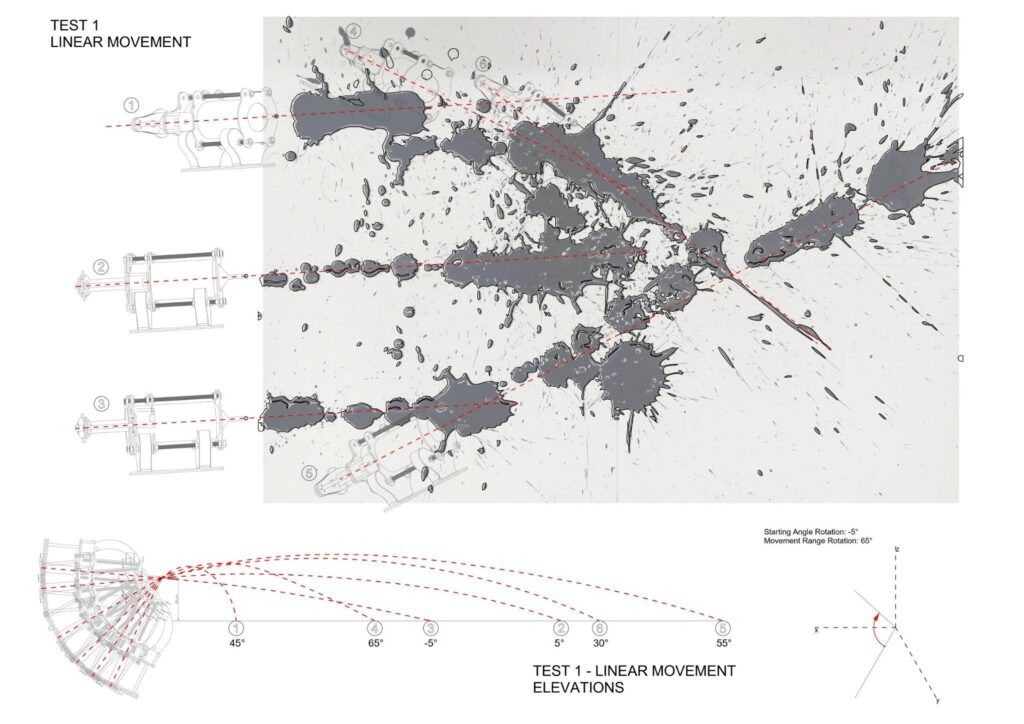
We then programmed the robot’s trajectories in Grasshopper, synchronizing motor activation with the robot’s position to produce spills from different angles and heights.
One of the key insights from this exercise was comparing our expectations with the system’s actual behaviour. We initially anticipated more controlled results, but gravity caused the paint to start falling out of the syringe even without motor activation, leaving a direct trace of the robot’s movement on the canvas. Although unexpected, this effect became interesting in its own right, as it mapped the path of the robot through the natural flow of the paint.
We also observed that the motors did not reach the speed required to expel the paint fast enough to create a “jump” of fluid out of the syringe. As a result, the length of the spills was shorter than expected and limited by the mechanical capabilities of the system.
The final outcome reflects both the possibilities and the limitations of working with custom-made tools at this scale, and it opens up questions about how to optimize future mechanisms for paint deployment in robotic environments.

