This project explores the computational logic and thinking to design an iterative growth algorithm that enforces specific filters and rules of selection to inform the assemblage of simple building blocks.
In Grasshopper the Anemone plug-in is used as the tool to iterate over the computational logic, informing how the geometry will behave within the digital environment when constrained by algorithmic perimeters.
Consideration has been given to the design of the building block as a means of storing topological information that inform the assemblage.
In this project, we explored how to create a selection process between vector fields and attractor points to create an assemblage influenced by the concept of Biomorphism.
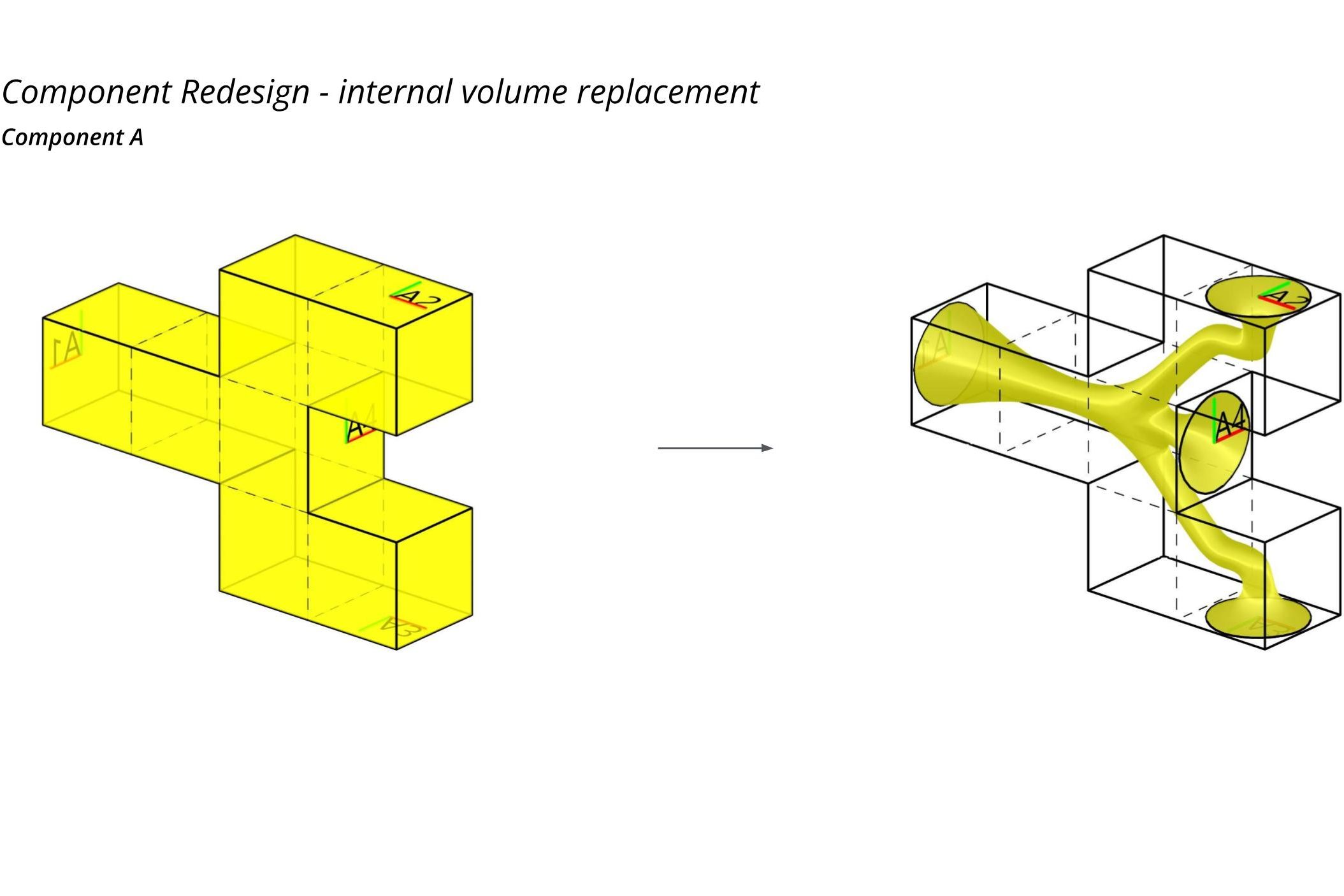
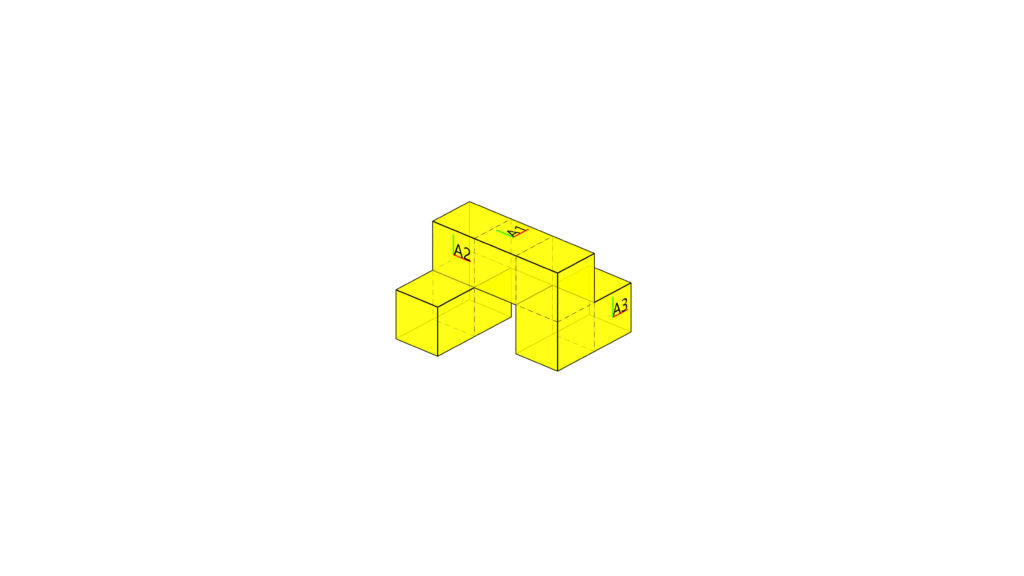
Component A
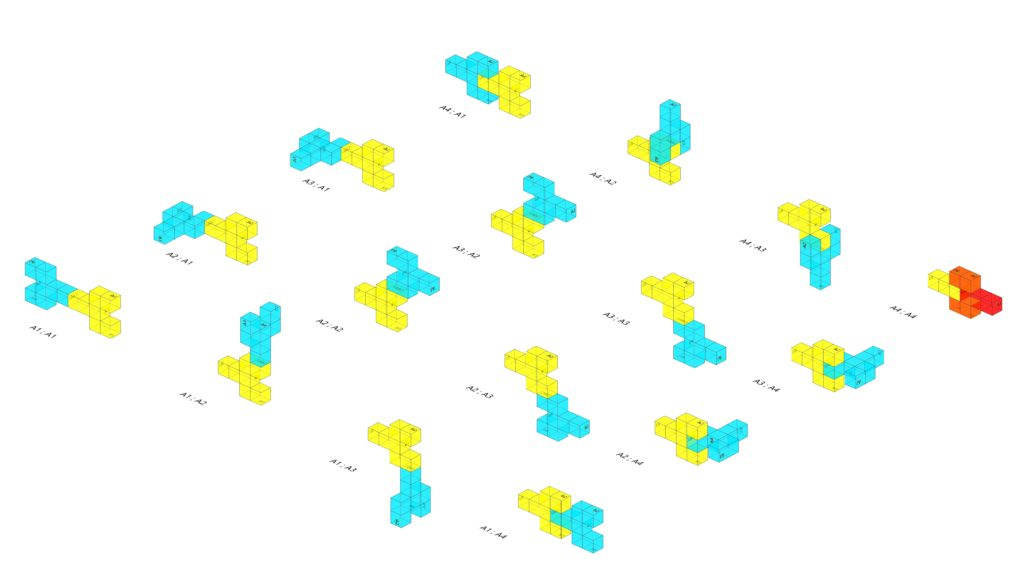
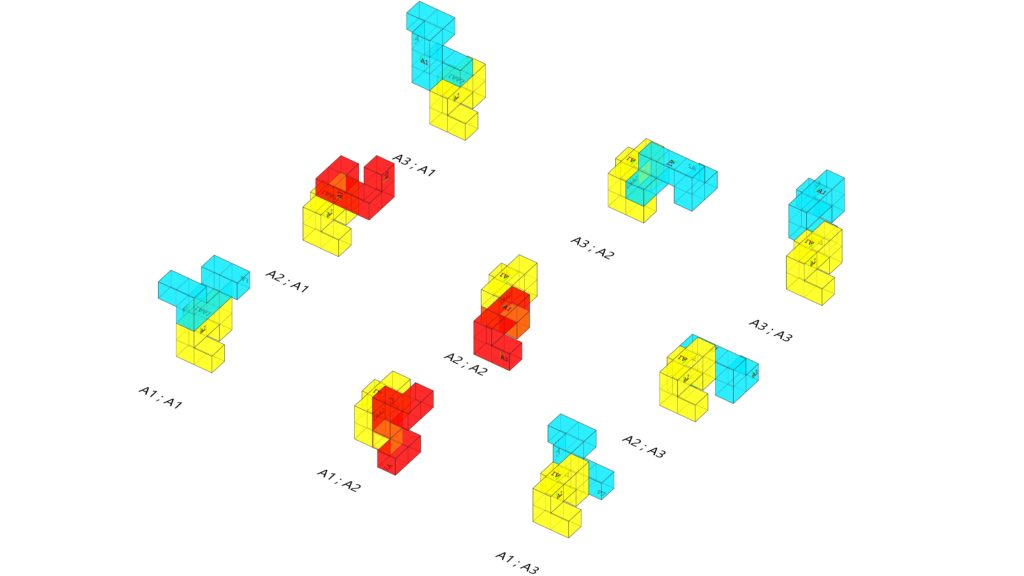
Component A – Permutations
Amount of handles: 4
Amount of combination: 16
Successful: 15
Unsuccessful: 1
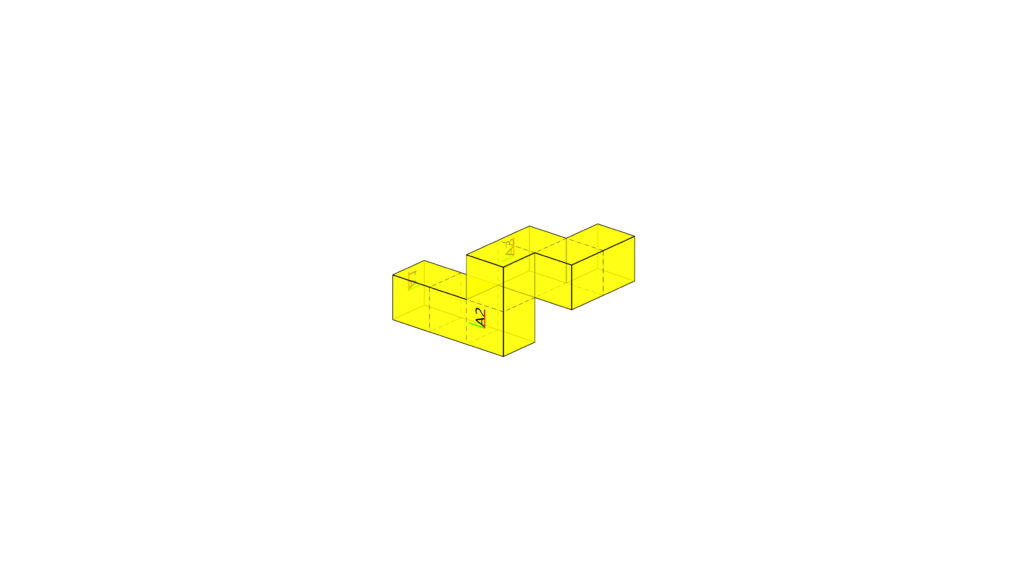
Component B
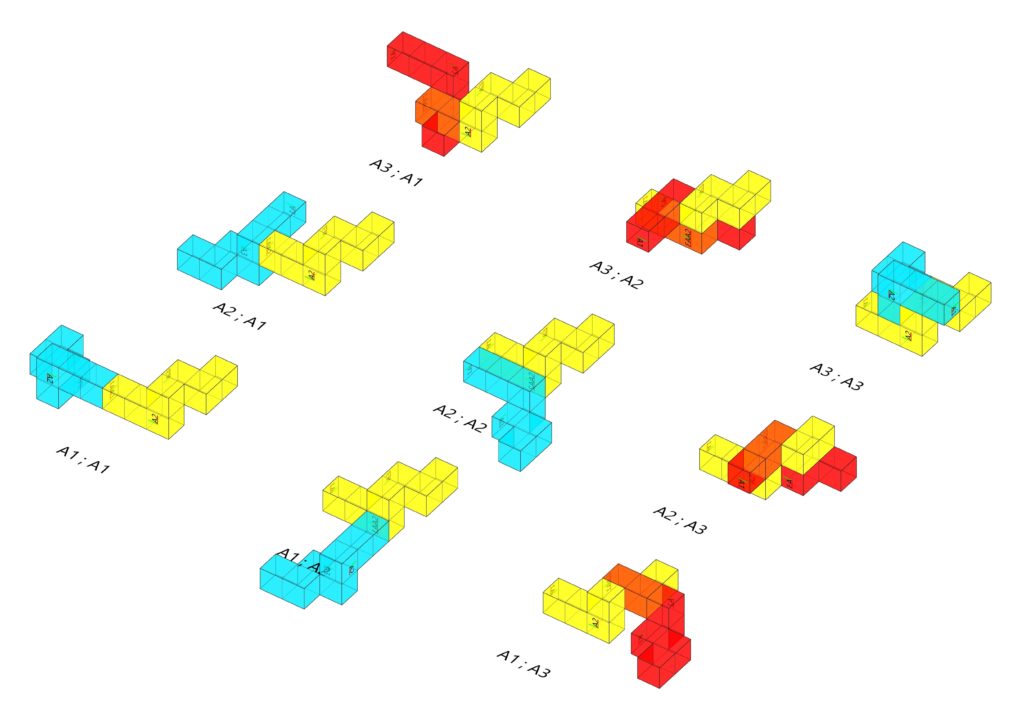
Component B – Permutations
Amount of handles: 3
Amount of combination: 9
Successful: 6
Unsuccessful: 3
Component C
Component C – Permutations
Amount of handles: 3
Amount of combination: 9
Successful: 5
Unsuccessful: 4
Component A with four particular handles in terms of position and rotation, has the highest successful permutation out of all combinations, which is 15 out of 16, is selected for use in the development and testing of our computational login due to is design and handle placement being able to create both compact and distributed arrangements. It allows the component to create dynamic assemblages. Also, the component with these particular handles can create linear patterns and compact patterns. These characteristics allow this component to grow within the selected environment of vector fields and attractor points.
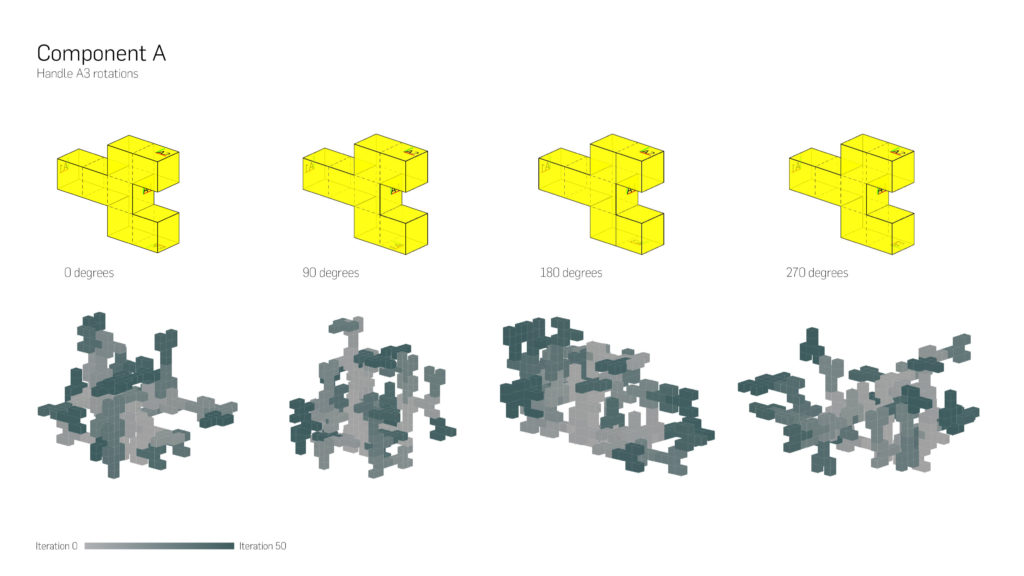
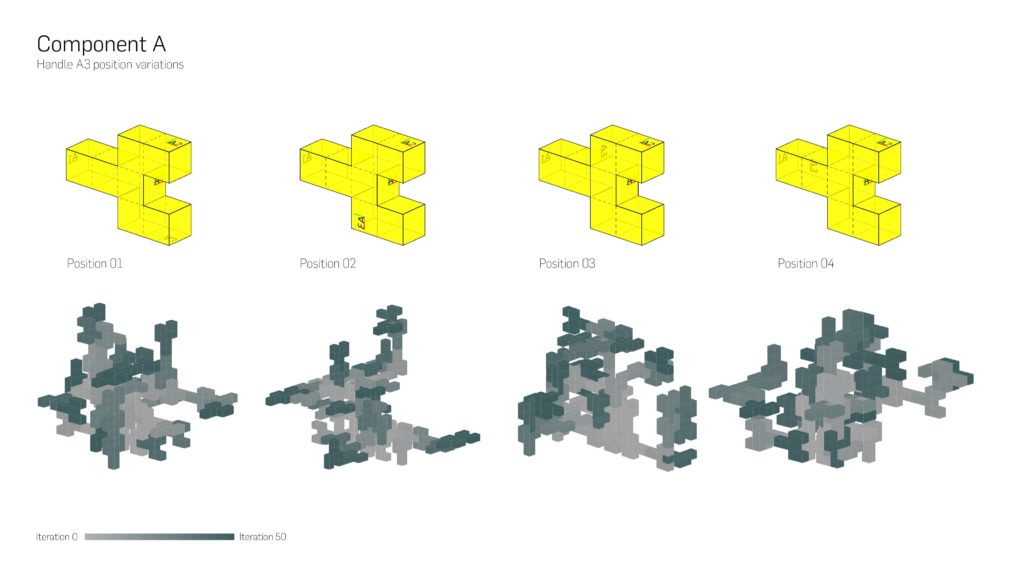
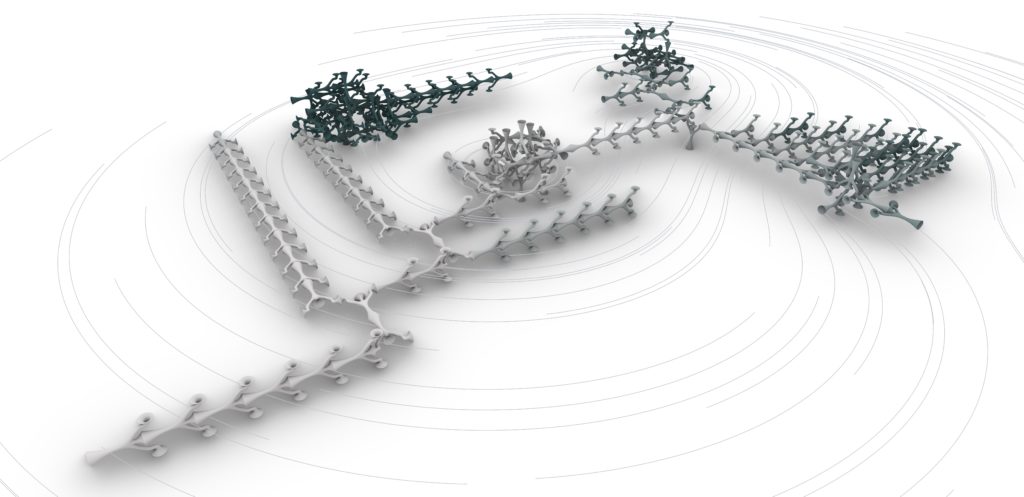
Component A – Assemblage
Amount of handles: 4
Iterations: 50
Assemblage components: 50
Success rate: 100%
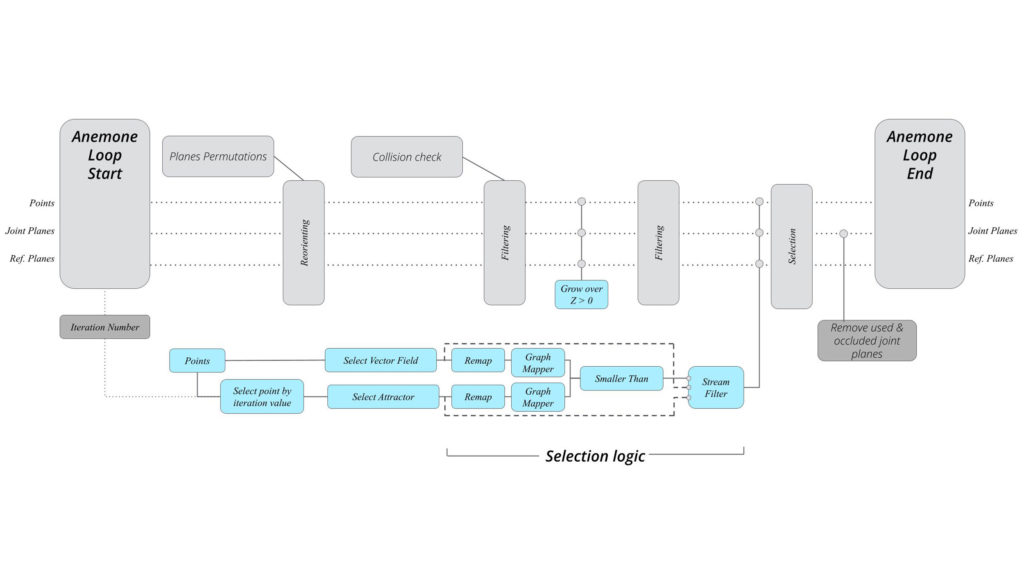
Selection logic
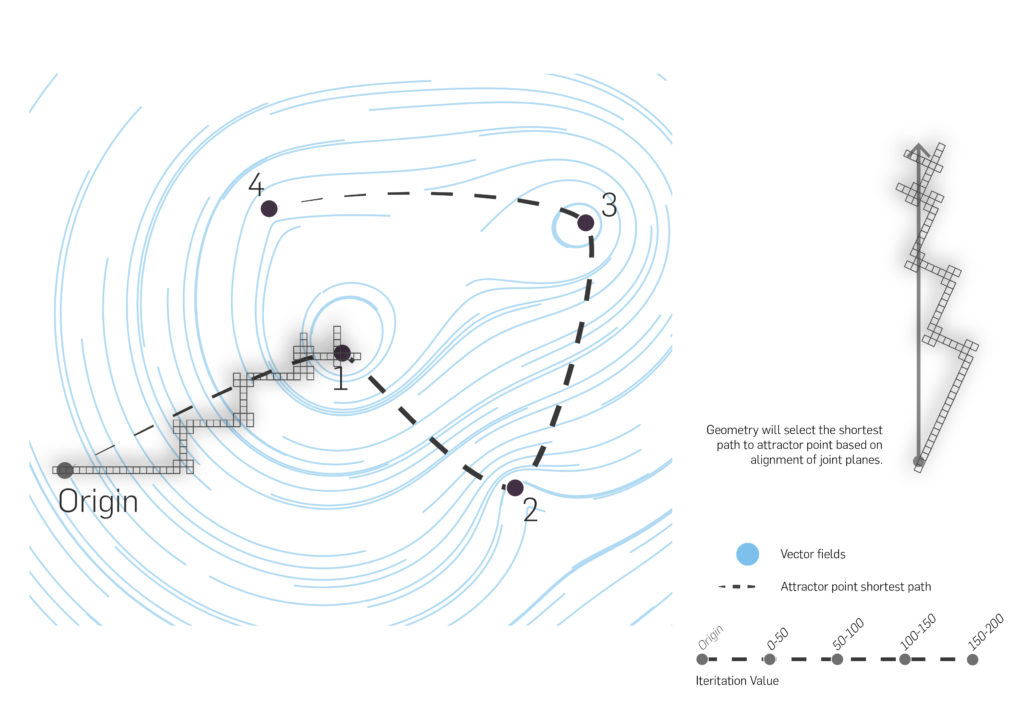
We developed a selection process where in each iteration the script compares the numerical output between two logic processes to determine the next stacking sequence.
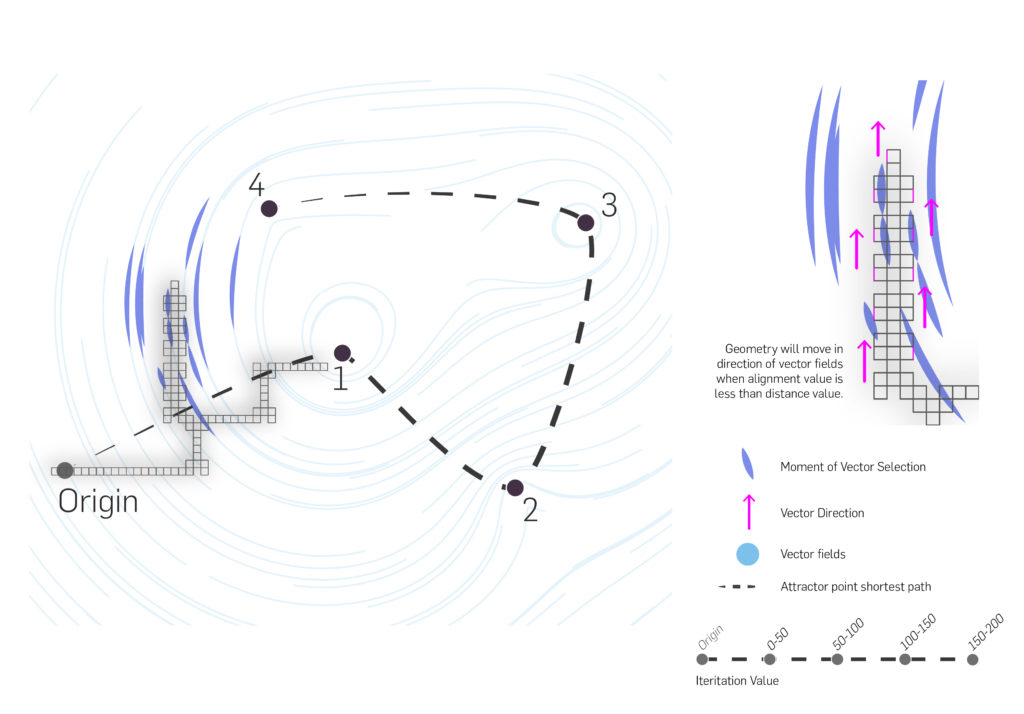
The first logic value is produced by the distance the object is from a given attractor point. The second logic value is derived from the alignment between the joint planes and the surrounding vector fields.
The stacking direction of the object is determined by whichever logic yields the smallest value.
With consideration to fabrication we would include a filtering process so that the geometry would always grow above the Z plane.
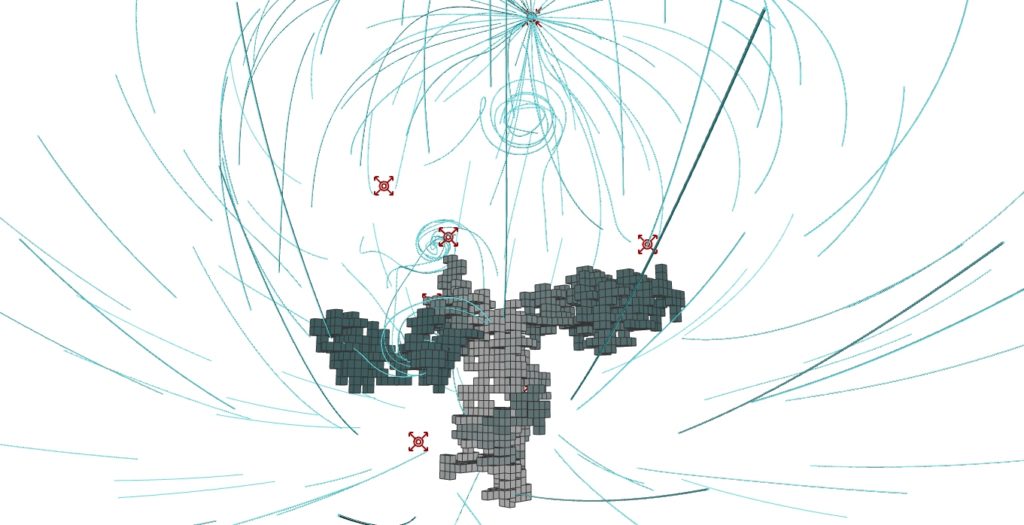
Vector Field Environment
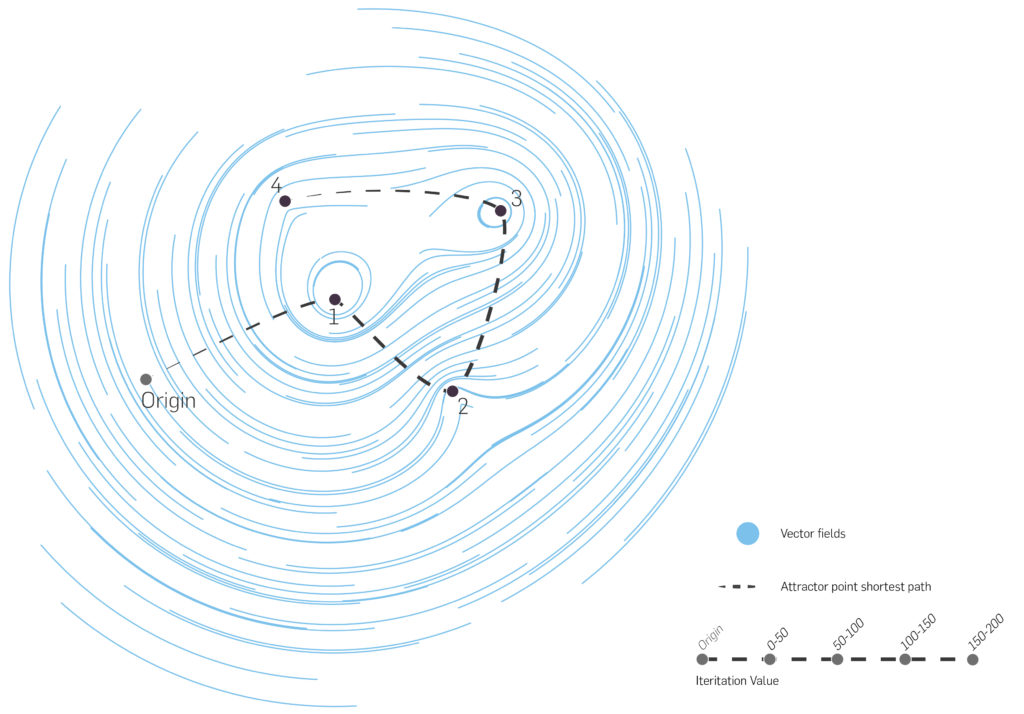
Selection path when only using attractor points as the selection process
Selection path when only using vector fields as the selection process
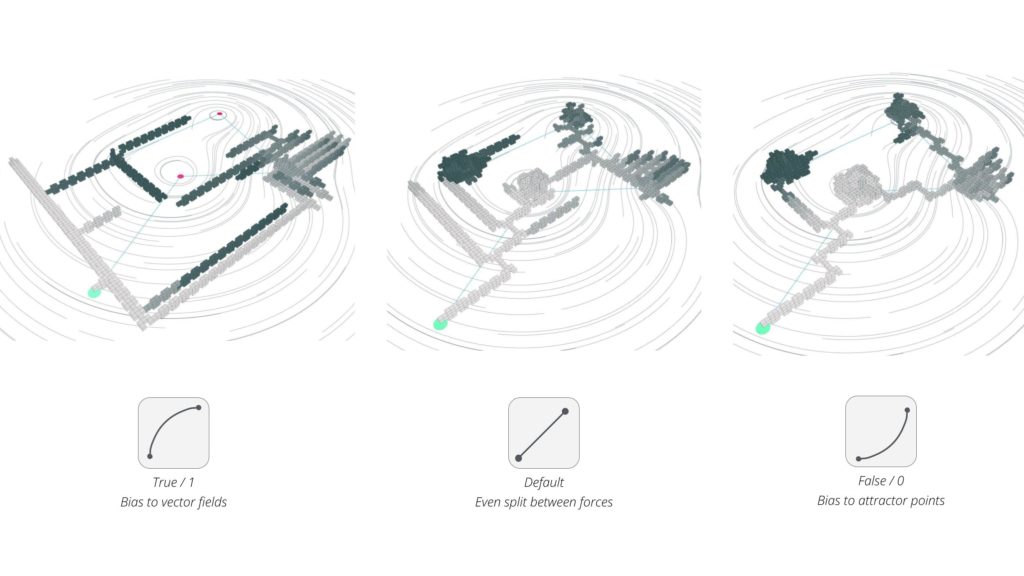
Adding in a level of control
By incorporating a graph mapper to each remapped values of the attractor point logic and the vector field logic we were able to achieve a high level of control over the outcomes of the selection process.
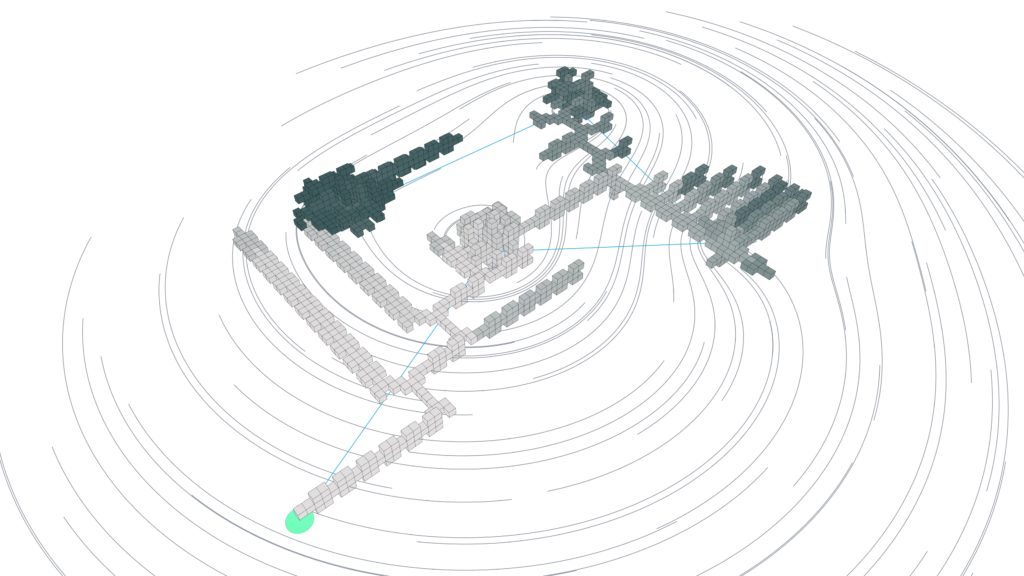
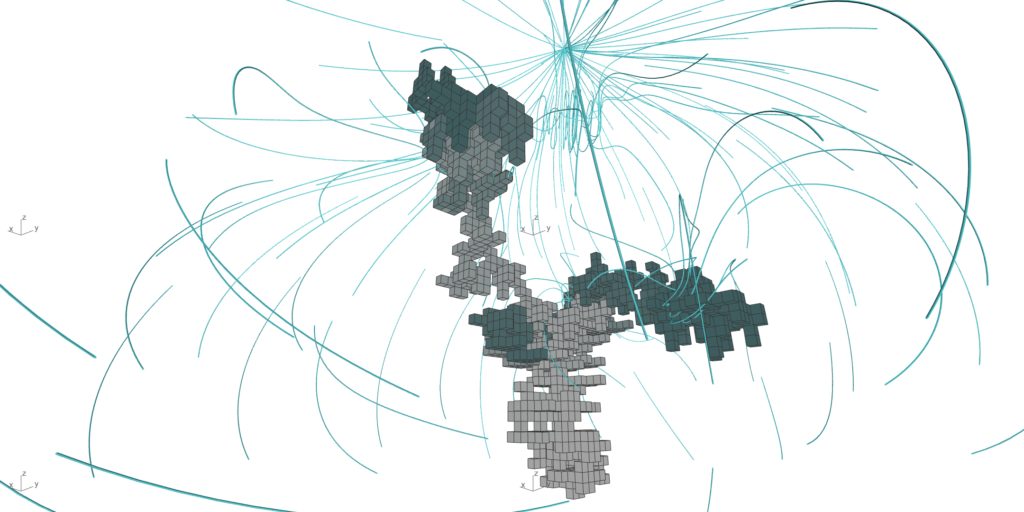
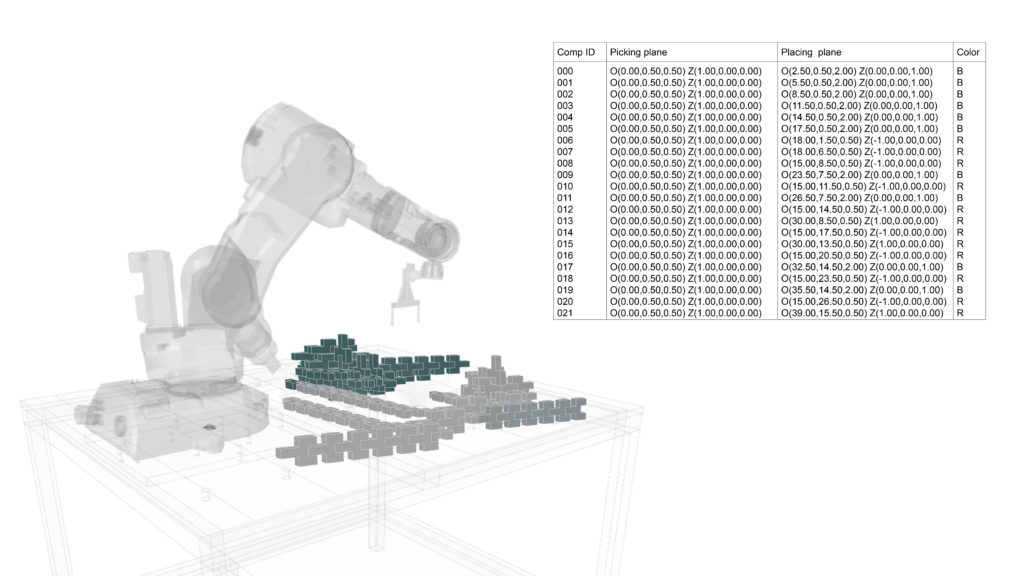
Robotic Process
Testing the geometry in a more complex environment
In this new environment we fine tuned the graph-mapper parameters and added additional point charges.
From this we were able to generate more biomorphic stacking sequences.